自由活塞高焓脉冲风洞发展历程及试验能力综述
2020-01-10谌君谋毕志献马汉东
陈 星, 谌君谋, 毕志献, 马汉东
(中国航天空气动力技术研究院, 北京 100074)
0 引 言
随着航空航天技术的发展,气体动力学在克服声障、热障、黑障等技术难题方面取得了突破性进展,但目前仍面临着高温气体效应、化学反应流和超声速燃烧等问题的挑战[1- 2]。超高速(速度大于3.0km/s)条件下的高温气体效应,使飞行器周围气体的物理属性和相关的流场特性发生了改变,是超高速飞行器设计需要考虑的主要因素之一[1- 4]。超高速气体发生的化学反应及其不同能量模式之间的转换,给气体动力学试验和数值计算带来了困扰[3- 5]。超高速燃烧需要在有限的空间(米量级)和时间(毫秒量级)内实现燃料稳定燃烧,增加了超高速流动研究的复杂性。超高速物理现象和流动机理认识上的局限,造成物理建模不尽适当,导致数值模拟存在一定的不确定性,因此需要进行试验研究[2- 5]。而飞行试验风险高、成本高、周期长,大量的前期试验探究需要在地面试验设备中进行[3- 6]。
常规高超声速风洞(Ma=5~12)通过降低自由来流温度来降低自由来流声速,从而提高自由来流的马赫数,实现超/高超声速马赫数和雷诺数的模拟[2- 4]。
超高速流动带来的高温效应在这种“冷”状态下的高超声速地面设备中无法复现。用于模拟超高速流动高温效应的2个关键参数是来流速度(比焓)和双尺度参数ρL(ρ为密度,L为特征长度)[2- 4,7],前者表征滞止焓,后者表征强激波后离解反应尺度。若空间再入飞行器和行星探测器再入大气时的速度超过7.0km/s,对应的气体分子宏观动能为7.4eV,周围气体通过激波加热和黏性阻滞减速,使得分子随机运动能量增加并超过氧气分子的离解能5.1eV,甚至超过氮气分子离解能9.7eV,从而导致飞行器周围气体离解甚至电离[8]。若模拟此速度(>7.0km/s),驻点热流会超过450MW/m2,目前连续式设备无法满足要求;而脉冲式高焓风洞能够产生总温和总压非常高的试验气流[9],能满足上述要求。
高焓脉冲风洞的驱动技术决定了风洞试验段所能达到的总焓和总压水平[10]。驱动技术均基于简单的激波管技术发展而来。目前有效的驱动技术主要有变截面驱动、多段驱动、轻质气体驱动和加热轻质气体驱动[11- 12]。其中,加热轻质气体驱动的加热方式主要有电加热、燃烧加热(爆燃加热、爆轰燃烧)和压缩加热(自由活塞)[1,3]。电加热驱动方式有良好的重复性且试验时间相对最长,但也有运行成本高以及大量轻质气体存储、运输、加热和排放等诸多不安全因素等问题。爆燃驱动在“波驱动”试验设备中能显著增强性能,但是在高焓情况下,由于缺乏试验数据,真实驱动性能未知。爆轰驱动方式获得的有效时间较长、运行成本低、扩展性好,但在喷管驻室总压和总温等性能上比压缩加热驱动方式低。压缩加热驱动可以获得最大的性能和运行灵活性,是目前世界上高焓脉冲风洞采用最多的驱动方式。
压缩加热驱动的脉冲风洞是采用活塞压缩器作为驱动方式的地面试验设备,活塞是其关键部件之一。按照活塞对气体做功的方式分为炮风洞(轻活塞)和自由活塞风洞(重活塞)。炮风洞驱动是活塞直接对试验气体做功,自由活塞驱动是活塞对驱动气体做功。值得注意的是,区分活塞的轻重不在于活塞本身的质量,而在于活塞单位面积的质量δ(活塞质量除以活塞横截面的面积,单位kg/m2)[13]。在活塞压缩运动中,δ起关键性作用,当δ→0时是激波压缩,为非等熵过程;当δ→∞时,可视为等熵过程。炮风洞的δ一般小于50,活塞速度小于接触间断面的速度,对试验气体的压缩是激波压缩,为非等熵过程;自由活塞脉冲风洞的δ一般大于250,活塞释放后的运动速度远小于被压缩气体的声速,因此自由活塞在压缩管中运动的过程可近似为等熵过程。试验段自由来流速度约等于试验气体总焓2倍的平方根。炮风洞受活塞质量和材料的限制,试验气体的总温小于2000K,并且高雷诺数运行能力有限。自由活塞脉冲风洞的重活塞压缩驱动气体,使得驱动气体具有很高的温度和压力。若空气作为试验气体,在一定条件下,自由活塞高焓膨胀管风洞会产生超过40MJ/kg的高焓试验气流[3,11]。
自由活塞高焓脉冲风洞可分为自由活塞高焓激波风洞和自由活塞高焓膨胀管风洞。(1)自由活塞高焓激波风洞(第二隔膜段下游为喷管):激波管中形成的入射强激波到达时,第二隔膜不发生破裂并反射激波,激波管中的气体被再次压缩,产生高温高压气体,最终导致隔膜破裂。(2)自由活塞高焓膨胀管风洞(第二隔膜段下游为加速管,加速管下游连接喷管):激波管中形成的入射强激波到达时,第二隔膜立即破裂,使得激波管中的压力和温度提高,且使气体具有一定的速度,这2种效应均能使第二隔膜破裂时在加速管中产生的激波得到增强、气流速度和总焓增加、静温降低。与高焓激波风洞相比,高焓膨胀管风洞的试验气流离解程度较低,试验气体成分更接近飞行条件,更适合近/超轨道速度下的超高速流动试验模拟[3,6],但有效试验时间较短。
自由活塞高焓脉冲风洞的概念始于1959年,在加拿大渥太华举行的国家研究理事会上,Stalker[14]做了关于自由活塞的报告,并对自由活塞激波管进行了演示。鉴于Stalker的贡献,自由活塞高焓脉冲风洞也被称为“Stalker管”。经过近60年发展,流体力学相关领域研究领先的国家针对自由活塞驱动开展了广泛的研究。目前代表性的高焓脉冲风洞主要有澳大利亚昆士兰大学T4[15]和X3[16]、美国加州理工学院T5[17]、英国牛津大学T6[18]、法国马赛大学TCM2[19]、德国宇航中心HEG[20]、日本宇航中心HIEST[21]和中国航天空气动力技术研究院FD- 21[22- 23]。
自由活塞高焓脉冲风洞在短暂的有效试验时间内,运用大量先进测试仪器,已经能够开展超高速条件下的气动热力学和气动光学等问题[11]的研究。另外,在高焓脉冲设备上还能开展自由飞、超燃冲压发动机点火燃烧和电磁辐射等试验[12]研究。
本文针对自由活塞高焓脉冲风洞,系统介绍其理论基础研究阶段、早期探索阶段和实用化发展阶段等3个阶段的发展历程及相应的试验能力,分析自由活塞高焓脉冲风洞在高超声速飞行器气动设计和高温气体效应机理研究中发挥的作用。
1 理论基础研究阶段(1899~1962年)
1.1 历史背景
1947年,Yeager驾驶Bell XS- 1实现超声速飞行。1955年,北美航空公司开始生产首架高超声速飞行器 X- 15。作为20世纪航空航天领域里程碑的这2个事件,表明了人类对飞得更快更远孜孜不倦的追求。商用航空飞行器的发展、探究未知宇宙的愿景和军用飞行器的应用等方面的需求,意味着相关气动载具的性能需要持续不断地提高,需要了解对应的复杂气动热力学等问题,为建立符合实际的数学模型提供高可信度的依据,这就对地面模拟设备产生了极大的需求。
1.2 相关理论的发展
1899年,法国化学家Vieille研究无烟火药在矿井中的爆炸问题时,完成了第一次激波管试验。1932年,Schedin建立了激波管理论并给出了激波管方程。1951年,Hertzberg[24]首先提出了激波风洞的概念,将激波管用于高超声速风洞设计,在激波管末端连接一个喷管,在环境温度大于试验气体凝结温度的条件下,喷管出口可获得高超声速气流。当采用轻质气体(氢气或者氦气)作为驱动气体,喷管驻室可以获得较高的总温和总压。
20世纪50年代中后期,利用激波管开展了大量真实气体效应的研究[25- 26],观察空气在高温高压条件下物理和化学流动现象。然而,传统激波风洞产生的压力和温度有限,在探索获得高温和高压试验条件的道路上,出现2种不同的思路:(1) 采用高性能的驱动技术,提高激波管上游驱动气体的总温和总压。(2) 提高激波管下游的激波强度,在激波管下游增加一段加速管,用非定常膨胀波代替激波风洞的定常膨胀波,能够获得高马赫数、高雷诺数的流场。如果单独采用第一种思路,可利用高性能驱动段使激波管中产生高焓高压试验气体,这种设备称为高焓激波管/风洞。如果将2种思路结合,在高性能激波管下游增加一段加速管,这种设备称为高焓膨胀管/风洞。
1.2.1 提高入射激波强度的研究
1957年,Alpher[27]指出压缩管截面积比激波管截面积大时,会增加一次非定常的膨胀,入射激波强度能够得到增强。采用变截面驱动的效果相当于在定常截面情况下驱动气体压力增加Gp倍。当驱动气体的比热比γ=1.40时,Gp的极限值为1.89;当驱动气体的比热比γ=1.67时,Gp的极限值为2.06。当面积比值大于16.0,面积带来的压力增益Gp开始接近极限值,因此通过面积比获得压力增益最经济的范围约在1.40~16.00之间。
Longwell[28]于1958年利用重活塞压缩空气获得强入射激波,并给出重活塞在近似等熵压缩条件下的运动规律。1959年,Stalker[4,29]在加拿大国家研究委员会(CNRC)建成第一座自由活塞激波管(图1(a)和(b)),压缩管直径0.073m,长1.61m,激波管直径0.025m,长1.70m。高压气源为空气,压缩管内充氦气,激波管中的试验气体为空气。当压缩管中压缩比λ=75、激波管初始压力p1=725Pa时,激波管中的入射激波马赫数约为25,有效试验时间约为0.05ms。

(a) Stalker管示意图
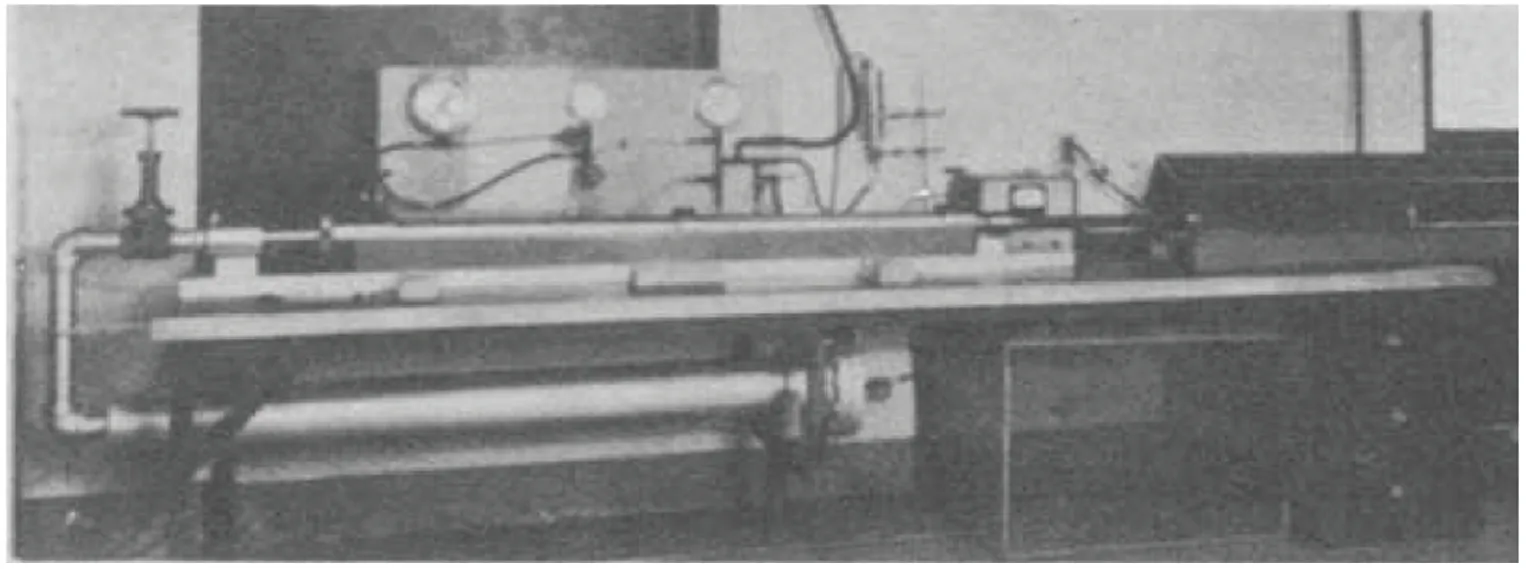
(b) CNRC的自由活塞激波管
Stalker指出,活塞在压缩管中向下游加速运动,高压储气室的能量转化为活塞的动能和活塞对驱动气体压缩所做的功,活塞压缩下游气体为等熵压缩。当活塞两边的压力相等时,活塞具有最大速度。随后,活塞在惯性作用下继续向压缩管下游作减速运动,进一步压缩驱动气体。当速度为零时,驱动气体获得最大压力和最高温度,但这种状态为非定常状态,此时的驱动气体不直接作为激波管的驱动气体,而是利用定压驱动原理[13],选取压力峰值下浮10%所对应的时间作为定压驱动时间。实现定压驱动的关键在于选择合适的活塞破膜速度,使得活塞在破膜时推动压缩气体的质量流量等于压缩气体进入激波管的质量流量,即破膜后活塞的运动能够补偿驱动气体进入激波管的消耗。此时驱动气体的压力将保持不变,从而实现定压驱动。由于重活塞压缩气体能够产生高温高压气体,1960年,Greif等[30]也开展了重活塞定压驱动技术的研究。同一时期,加州理工学院喷气式实验室建造了一座自由活塞激波管。
1.2.2 膨胀管理论及技术的研究
膨胀管的概念首次由Resler和Bloxsom[31]在1952年提出,利用非定常膨胀波能够获得更高马赫数和雷诺数的流场。1953年,Bernstein[32]提出在激波管下游再安装一个加速管,可以获得更高的马赫数和静温。1955年,Hertzberg[33]指出在激波管末端增加一个加速管后,可以提高流场的雷诺数和温度,但是会导致流动时间减小。Hertzberg提出在加速管末端增加一个喷管的可能性,这是膨胀管风洞概念的首次提出。1962年,Trimpi[34]完善了膨胀管的理论体系,并首次将相关设备称为“膨胀管”。相比于气体会发生离解甚至电离的高焓反射型激波风洞,在相同的初始条件下,膨胀管获得的自由来流速度约为反射型激波风洞的2倍,试验气体离解程度低,在不同能量模式下更容易维持平衡。Trimpi指出,较大尺寸的加速管,可以有效减少加速管内气流边界层的影响,增大试验核心流区域。由于试验气体紧靠激波管和加速管连接处的二道膜,二道膜的打开方式会严重影响试验时间,1965年,Trimpi[35]在完全气体条件下推导出:在加速管下游连接较长的喷管,能得到更长的试验时间、更长的试验气体长度、更高的效率,减小二道膜打开方式带来的问题。1966年,Callis[36]分析了完全气体条件下不同连接段(压缩管、激波管、加速管和喷管)面积变化对流动的影响,试图通过面积变化来减小膜片破裂带来的问题以及加速管中黏性效应带来的边界层问题。Callis对加速管末端的扩张喷管(Skimmer喷管)中的流动进行了研究,指出该喷管能够有效缓解加速管中黏性效应带来的边界层问题,但是会导致喷管前缘产生激波,减小气流雷诺数。20世纪60年代中后期,Norfleet[37]和Loper[38]等人对膨胀管/风洞开展了试验研究,分析了化学平衡态条件下的流动机理。图2为自由活塞膨胀管示意图(在激波管下游安装了一段加速管)。
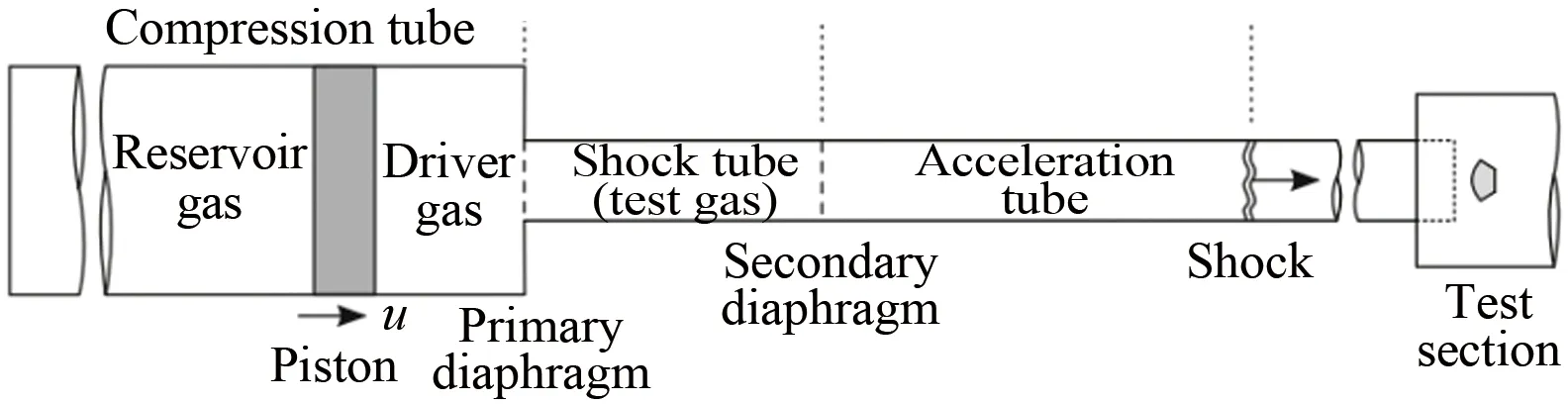
图2 自由活塞膨胀管示意图[4,39]
1.2.3 入射激波衰减问题的解决
随着入射强度的提高,在较长的激波管末端获得的入射激波马赫数远小于理论值,激波衰减导致总焓损失严重、流动非定常现象加剧。入射弱激波的衰减主要由壁面边界层引起,而入射强激波的衰减主要有两方面原因:(1) 在形成阶段,由于破膜的非理想和非定常的黏性效应,造成初始衰减;(2) 在运动阶段,由于壁面的边界层效应、高温气体效应和反射膨胀波作用的结果,造成二次衰减。为了减缓入射激波的衰减,需要较大内径的激波管,并且激波管长度和内径之比需要满足一定的几何关系[4,11]。
1.2.4 缝合接触面运行技术
当入射激波强度较大时,会导致试验气流有效时间减少。为了增加激波管有效流动时间,Wittliff[40]于1958年提出缝合接触间断面的概念,认为由于入射激波在激波管末端反射,反射激波和接触间断面会相互作用:一方面将产生一道透射激波,通过接触面;另一方面在接触间断面上反射非定常波(激波或者膨胀波),或者不发生任何反射。反射波系若非Mach波,这些波将传入试验区域,破坏试验气流的定常性,缩短试验时间。反射波系若为Mach波或者不发生反射,则称为接触间断面缝合[40],如图3所示。采用缝合接触面条件,能够消除试验气体中的非定常反射,保持流动平稳性,并最终延长有效试验时间。接触间断面条件可以用接触间断面两侧的气体内能[41]、温度[42]和缝合马赫数[43]来表征,不同表述方法原则上是等价的,但在理论分析和实际计算中,采用缝合马赫数更为方便。当入射激波马赫数大于4,其下游气体开始呈现高温气体效应,从而影响下游气流的密度、马赫数和比热比等参数[44]。当入射激波马赫数达到8以上,真实气体效应必须考虑,因其严重影响缝合马赫数[45]。需要注意的是,缝合条件对延长风洞试验时间是有限的,当反射稀疏波追赶上接触间断面时,会对试验气体产生强烈干扰,试验时间一般在接触间断面到达激波管末端之前就已结束。
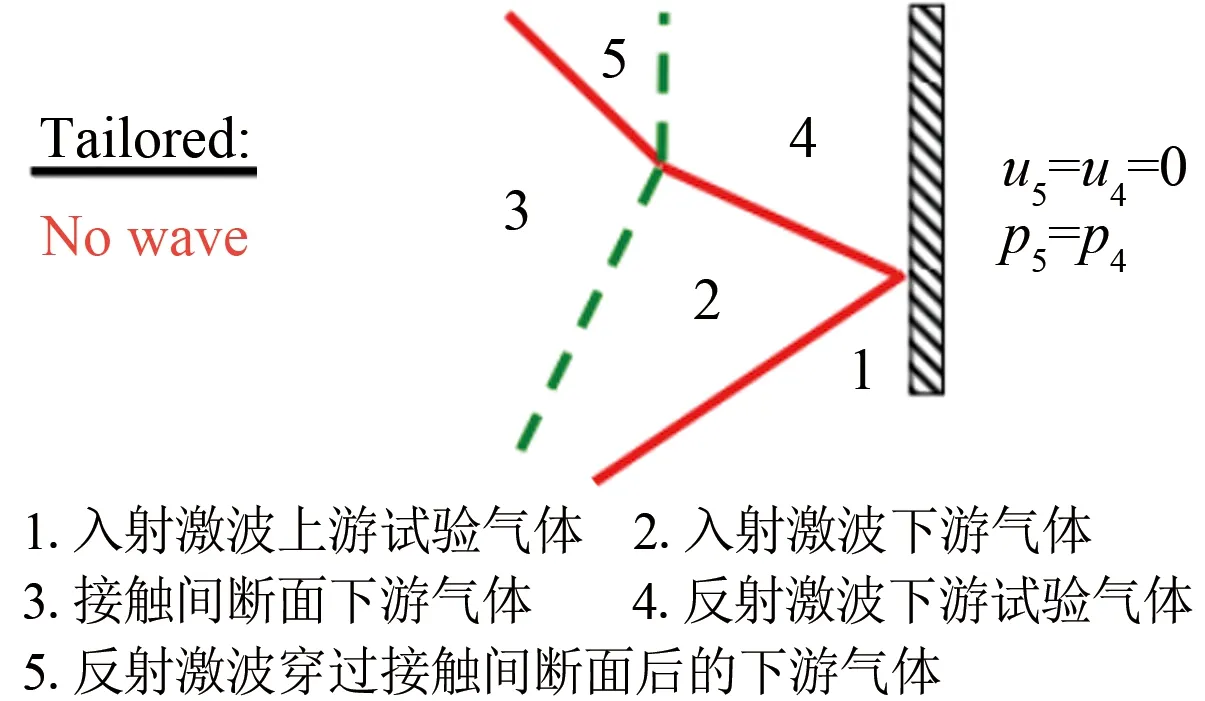
图3 反射激波- 接触间断面缝合示意图[40]
1.2.5 边界层效应
到20世纪60年代中后期,自由活塞高焓脉冲风洞的相关理论基础基本建立,主要体现为已经认识到活塞的等熵压缩、缝合接触面条件、激波管试验时间和边界层效应等因素的重要性。这一时期,重活塞实际运行过程无法安全可控,风洞不能产生定常流场,但自由活塞在压缩管末端呈现出的定压驱动能力,为自由活塞脉冲风洞的发展带来了希望。
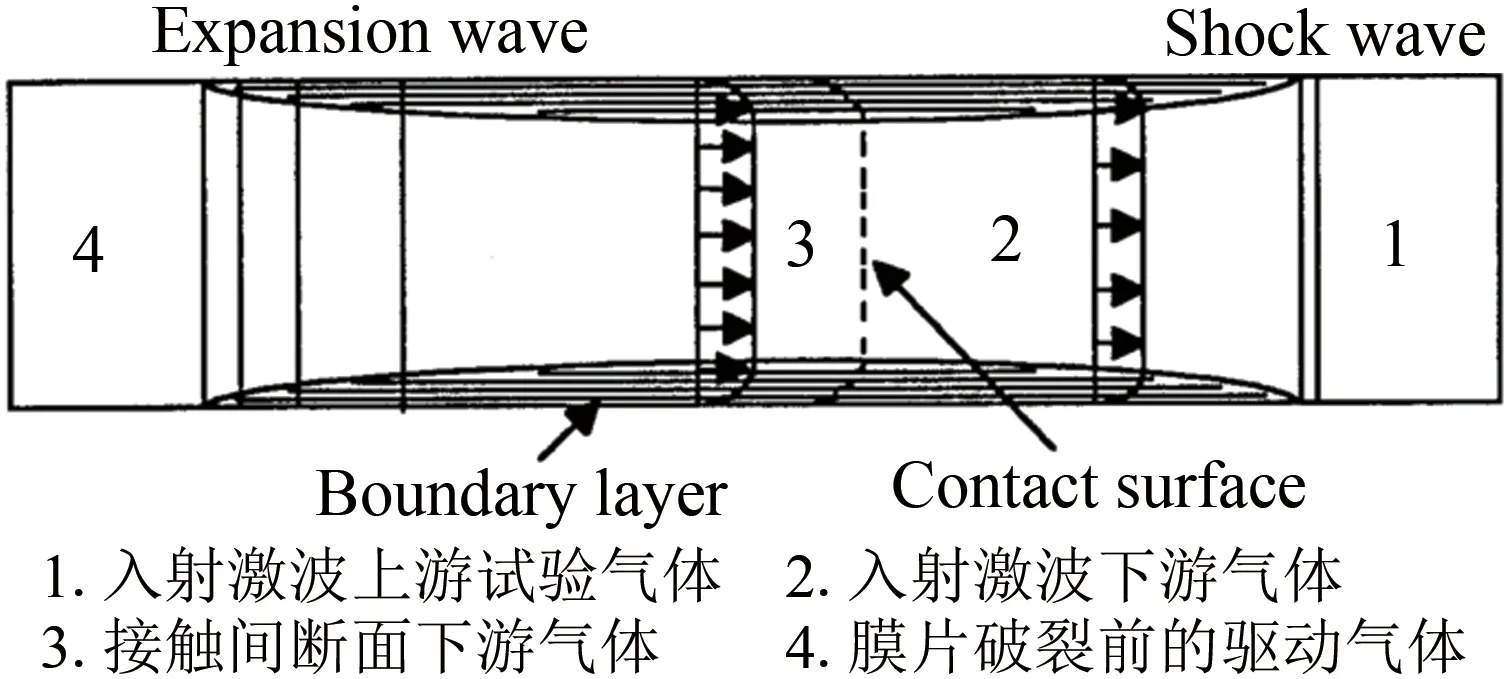
图4 激波管的边界层示意图[46]
2 早期探索阶段(1962~1977年)
2.1 历史背景
20世纪60年代以来,人类相继突破第一宇宙速度和第二宇宙速度进入外太空。超高速飞行器的发展以及人们对高温气体在高速条件下认识的局限,使得太空探索过程中存在一系列不确定因素。为了解超高速过程中遭遇的未知气动条件,亟需地面设备模拟可信赖的飞行环境。对于地面试验而言,为了获得超高速自由来流,必须提高喷管驻室总温(甚至超过10 000K),对风洞结构带来很大的挑战,连续式设备无法满足要求,这给高焓脉冲式风洞带来了机遇。然而,由于这一时期风洞测试技术无法满足风洞毫秒量级有效运行时间的要求,特别是无法进行测力试验,使其在气动试验方面的应用受到很大限制,在20世纪60年代末期到70年代中后期发展缓慢,在欧洲和北美的研究趋于停顿,但是澳大利亚在Stalker团队的坚持下,取得很多成果,并为后续的实用化发展打下坚实的基础。
2.2 自由活塞脉冲风洞的早期建设
2.2.1 自由活塞激波风洞的早期建设
在澳大利亚国立大学,Stalker主持建造了小型自由活塞高焓激波风洞T1和T2[47](见图5)。Stalker利用T1和T2验证了活塞能够安全受控,并获得了超高速气流,解决了活塞在气动力控制下高速运动并在压缩管末端安全停止的同时能够维持定压运行这一难题。在大量的试验数据基础上,Stalker发展了自由活塞风洞运行的相关理论,指出压缩管和激波管的尺寸、活塞质量和气体组分及其压力需要满足一定的关系[48]。
Stalker利用自由活塞压缩理论建造了T3自由活塞激波风洞(见图6)和DDT自由活塞激波管。T3风洞不仅能够观察到很强的高温气体效应,而且能够进行有效控制和测量。自由活塞高焓激波风洞产生高焓高压气体,其自由来流参数的确定过程比低焓高超声速风洞复杂很多。1971年,McIntosn[49]利用磁流体技术测量了T3风洞的自由来流参数。当喷管驻室总压23.8MPa、总焓50MJ/kg时,测得喷管出口速度达到8km/s。1976年,Crane[50]采用质谱技术测量非平衡条件下气体组分浓度,分析了分子电离后电子碰撞的相关性。
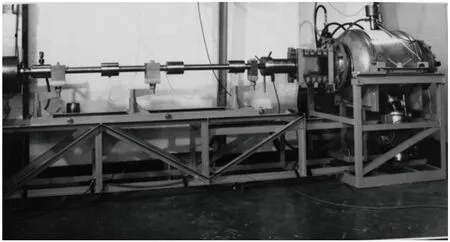
图5 T2自由活塞激波风洞[47]
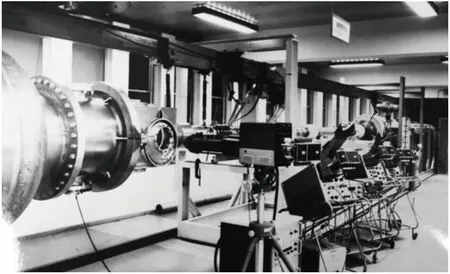
图6 T3自由活塞激波风洞[47]
在T3风洞中,不仅能够开展离解条件下圆柱、圆锥、尖楔、三角翼等典型外形[51]的高温气体效应研究和高温气体条件下激波相互干扰研究[52],而且可以开展层流边界层离解效应[53]的研究。T3风洞在1969年建成后,截至2016年已经运行7000多车次[47]。1970年,DDT激波管建成,主要开展气体反应动力学[54]、激波光谱[29]、接触间断面和激波的不稳定性[29]研究。1980年,T3风洞进行了超燃冲压发动机点火试验[55],获得了火焰稳定燃烧数据,研究了燃料喷射机理、激波诱导点火、点火增强原理和燃烧室长度及压力的影响。
T3风洞和DDT激波管的成功,对高超声速地面模拟设备发展作出了极大的贡献,培养出了Sandeman和Hornung等合作伙伴和大量的专业人才,为自由活塞驱动的高焓脉冲风洞在世界上的广泛建设奠定了基础。T1、T2、T3风洞和DDT激波管的参数如表1所示,可以看出,即使是早期的自由活塞激波风洞,活塞单位面积的质量δ都大于250kg/m2。
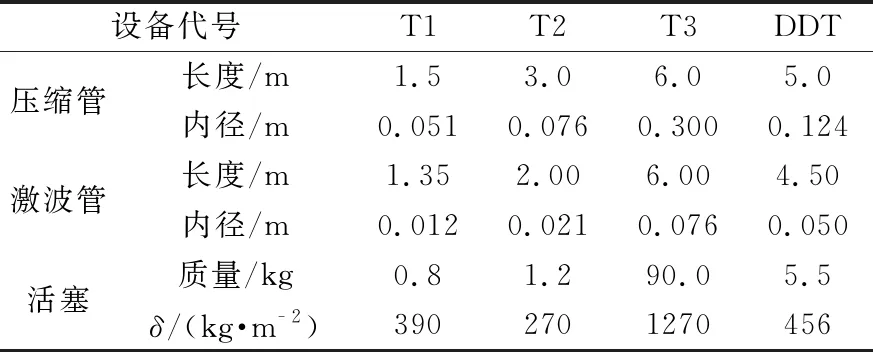
表1 自由活塞激波管/风洞参数Table 1 The parameters of the free piston shock tube/tunnel
2.2.2 自由活塞膨胀管/风洞的早期建设
在自由活塞膨胀管研究的早期阶段,为探索加速管中试验气体的流动机理,采用轻质气体(或者加热轻质气体)驱动,在激波管中产生入射强激波。为验证膨胀管的性能,NASA兰利研究中心于1965年将一个激波管改造为膨胀管[56],其试验结果与Trimpi的无黏理论[34]的计算结果存在一定偏差。考虑到实际流动激波衰减、二道膜破裂、流动扰动、接触间断面混合、边界层厚度和热化学非平衡等因素,这不算严重影响膨胀管的试验能力,膨胀管能够产生超高速气流已经得到广泛认可。20世纪60年代末期,为获得更高的压力和温度,NASA兰利研究中心建造了一个较大尺寸的膨胀管,Moore[57]利用常温和电加热的氦气作为驱动气体,空气作为试验气体,获得速度为5~6km/s的试验气流,试验时间为0.2~0.4ms,发现简单的膨胀管理论不适合预测流动热化学状态。1974年,Miller[58]利用空气、He、Ar和CO2作为试验气体,得到气流膨胀过程为热化学平衡态。1975年,在该膨胀管末端加装了一个锥角10°的喷管,2年后,喷管被移除。Miller[59]解释在无喷管条件下获得的流场更好。经过10年左右的发展,实际流动的若干问题依旧没有完全解决,只有为数不多的试验状态能够产生可用的定常流场。1983年,由于缺少资金等原因,该膨胀管停止运行[59],但其积累的经验为后续的发展奠定了基础。
3 实用化发展阶段(1977年至今)
3.1 历史背景
科技和社会的发展,对航天器提出新的要求——重复使用,加大载荷,减少成本和绿色环保。从人类开始进入太空到现在,上百亿美元投入到高超声速飞行项目中(按照推进系统的类型主要分为超燃发动机推进和火箭动力推进)。然而,由于在高超声速飞行器研制方面还存在科学盲区,对影响飞行稳定性的规律认识不足,其设计难度远远高于一般飞行器,很多项目在没有完成前就被取消,比如20世纪60年代早期的X- 15、X- 20和Dyna- Soar项目,1993年的X- 30及其对应的NASP项目被取消;X- 33和X- 34在2001年也被取消。这表明了在空间探索过程中先期相关科学问题及机理研究的重要性。这些飞行器的发展极大地推动了高超声速空气动力学学科的发展,促进了高焓激波风洞等地面试验设备和数值模拟技术相应模拟能力的提高。
3.2 自由活塞高焓脉冲风洞大规模建设和应用
3.2.1 自由活塞激波风洞
在T3风洞中成功进行了冲压发动机点火等试验之后,流体力学领域研究领先的国家开始大量新建自由活塞高焓激波风洞。
在澳大利亚研究理事会(ARC)的资助下,Stalker于1984年在昆士兰大学开始建造尺寸更大的T4风洞[15],较大的L/D(L为压缩管长度,D为压缩管内径)能够解决压缩管压力恢复问题。自1987年T4风洞调试成功以来,截至2016年,该风洞已经运行11 000多车次[47]。1989年,美国RHYFL风洞[60]开始建造,然而由于NASP计划的终止,虽然其主体结构已经建成,但仍于1993年停止调试,设备封存。1990年,T5风洞[17]在美国加州理工学院建成,典型状态运行时间为1~2ms。1991年,法国马赛大学建成中等尺寸的TCM2风洞[24],能进行空气、CO2、N2、CH4和Ar等不同混合试验气体的试验。1991年,由欧洲HERMES计划资助的HEG风洞[20]在德国宇航中心建成,成为当时最大的自由活塞激波风洞,该风洞开展了大量的国际合作吹风试验。1993年,AEDC和德国宇航中心合作建造FPST风洞[61],开展高温气体效应研究。1994年,中国空气动力研究与发展中心超高速所利用200m自由飞弹道靶的二级轻气炮(FD- 18)作为自由活塞激波管运行,获得了令人满意的结果,初步证明该设备具有模拟真实气体效应的能力[62- 63]。1995年,日本宇航中心为验证自由活塞技术,建造了中等尺寸的HEK风洞。1998年,在HEK成功的基础上,建造了比HEG更大的自由活塞激波风洞HIEST[4,21]。德国UniBwM大学为研究高焓条件下真实气体属性和模拟高超声速飞行器真实的飞行环境,于2008年建成中等尺寸的HELM风洞[64]。2016年,T6风洞[65- 66]在英国牛津大学建成,该风洞继承了澳大利亚国立大学T3风洞的活塞发射机构和压缩管,以及牛津大学原有炮风洞的激波管、喷管和试验段,另外设计了部分连接机构。组合而成的T6风洞采用自由活塞驱动,实现高焓条件,拥有三模态运行能力:反射激波风洞模态,膨胀管风洞模态和无反射激波管模态。 2016年,FD- 21风洞(见图7(a)和(b))[22- 23]在中国航天空气动力技术研究院建成,是目前世界上尺寸最大的自由活塞高焓激波风洞。2017年,澳大利亚为开展全尺寸的HIFiRE8超燃冲压发动机试验,将X3膨胀管改造成X3R激波风洞[67]。这一时期世界上主要的自由活塞高焓激波风洞参数见表2。
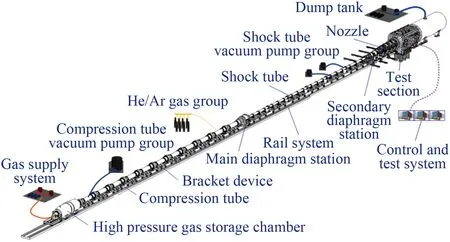
(a) FD- 21自由活塞激波风洞示意图

(b) FD- 21自由活塞激波风洞照片
3.2.2 自由活塞膨胀管/风洞
1987年,TQ膨胀管建成,之后改进为X1[68],能在15μs有效运行时间内,获得入射激波速度13km/s、总焓108MJ/kg和总压335MPa的试验气流,其总焓和总压远超反射型激波风洞。1987年10月,GASL膨
胀管开始在NASA兰利研究中心安装,并于1989年3月完成第一次试验。1994年,为增加试验时间,将GASL膨胀管活塞驱动改为爆轰驱动,并更名为HYPULSE[69]。X2 膨胀管[70]于1995年建成,最初是为验证组合活塞等结构的性能,并作为大尺寸X3膨胀管的验证模型。X2膨胀管有2个压缩管(二级压缩),组合活塞运动到第一个压缩管末端时,释放的小活塞作为第二压缩管的活塞继续压缩驱动气体,实现多级压缩。二级压缩可以有效阻滞反射非定常膨胀波对试验气体的干扰,但是增加了活塞压缩器结构的复杂性。2001年1月,二级压缩的X3[71]建成并于4月进行首次试验,活塞总重300kg,其中第二级活塞重100kg。X3膨胀管在调试过程中面临很多困难,最主要的是活塞在第一级压缩管中的减速问题,当降低活塞的运行速度时,膨胀管的性能随之降低,于是随后将二级压缩改为单级压缩。X2膨胀管也于2004年改造为单级压缩,到2016年已运行超过2500车次[4]。1999年,JX- 1膨胀管[72]在日本东北大学建成,最初主要为MUSES- C再入飞行器模拟试验飞行环境。2016年,日本宇航中心为了模拟行星返回舱再入的大气环境,将HEK自由活塞激波风洞改造为HEK- X膨胀管[73]。2016年在英国牛津大学建造成功的T6风洞[65- 66],在设计之初就提出有膨胀管/风洞运行模式。2016年,中国航天空气动力技术研究院建设成功的FD- 21风洞为全浮动结构,可以方便地改为膨胀管/风洞。2019年,中国空气动力研究与发展中心研制的膨胀管完成安装,目前正在调试中。这一时期世界主要的自由活塞高焓膨胀管/风洞参数见表3。
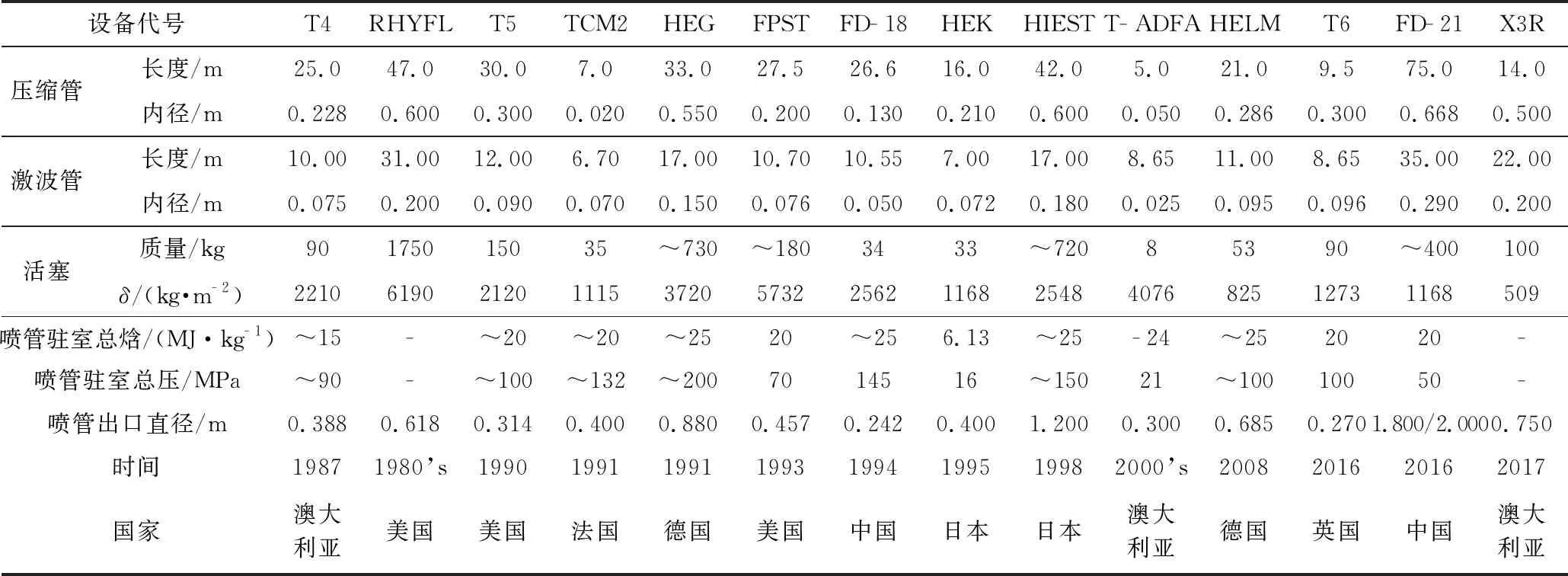
表2 自由活塞激波风洞参数Table 2 The parameters of the free piston shock tunnel

表3 自由活塞膨胀管/风洞参数Table 3 The parameters of the free piston expansion tube/tunnel
虽然经过了60多年的研究建设,膨胀管发展为膨胀管风洞也只能说取得了有限的成功,主要是因为在连接喷管后较难获得定常试验气流。1994年,Leyva[74]通过研究主膜片和二道膜面积的变化,得到优化的面积比,可以增加试验气体区域的长度。Leyva指出,在特定的条件下,在加速管末端增加一个喷管可以增加试验时间和试验区域。1996年,Bakos[75]为HYPULSE膨胀管设计了一个喷管(Capture 喷管),该喷管入口直径和加速管的内径大小相同。虽然Capture喷管不会像Skimmer喷管那样在入口处产生激波,但是仍然不能获得均匀气流。2000年,Sudnitsin[76]为了增加X1膨胀管试验段的核心流区域,设计了一个定常膨胀的收缩膨胀喷管,喷管半锥角为8°,膨胀比为9。膜片安装于喉道处,减少气流在喷管收缩段受到的影响,同时延长试验时间。2001年,Chue[77]为HYPULSE设计了另外一套喷管。
高焓条件下,常规型面喷管在非设计工况下获得的流场不均匀;锥形喷管使用范围广,但在喷管出口会继续扩张。气流在膨胀管风洞的喷管流动过程中,只有少数分子处于振动非平衡态[78]。对于膨胀管风洞,气流宏观动能来自其在加速管中的非定常膨胀,试验气流几乎没有发生化学反应,能够复现飞行环境[79]。
3.3 自由活塞理论的发展和相关问题
自由活塞高焓脉冲风洞大规模的应用,促进了对活塞运动特性的研究并加深了对相关流动机理的理解。自由活塞压缩轻质气体,能够产生入射强激波,同时也带来了驱动气体的污染、试验时间短等问题。
3.3.1 自由活塞理论体系的发展
1988年,Hornung[80]完善了活塞压缩器中活塞运行的理论刻画,认为活塞从静止突然起动,高压空气贮室一侧的膨胀过程是非定常的。Hornung指出,在给定的设备尺寸下,定压驱动时间关于压缩比存在极大值,当压缩比在40~60区间时,定压驱动时间一般可以保持在可用水平。目前,绝大多数的自由活塞激波风洞的压缩比在上述范围内。1991年,Beck[81]指出,对于活塞运动,完全气体假设和无限大贮室容积假设是十分合理的,因为研究显示:高压下气体非理想行为和有限贮室容积影响下的定压驱动时间,和理想情况下的定压驱动时间的差值不超过百分之一。1992年,Labracherie[82]通过试验对压缩过程进行了研究,结果表明压缩管末端压力存在高频振荡,因此建议压缩管和激波管之间的连接段需要满足一定的长度要求。Labracherie使用电位计对压缩管的反弹进行了测量,结果表明:如果不考虑摩擦因素,活塞和压缩管的最大位移之比,与其质量之比正好互为倒数。压力平衡最终出现在试验结束时刻,可以观察到,压缩管整体的净向后位移距离不为0,原因主要是压缩管壁面和活塞之间存在摩擦。1994年,徐立功[83]从非定常气体动力学方程组出发,给出一种精确计算活塞在压缩管中运动规律的方法。1998年,Itoh[84]基于活塞破膜后的运动学方程,提出了“调谐操作”概念,可使活塞缓和地停在压缩管的末端。Itoh采用Bessel方程理论获得了活塞运动方程近似的显式表达,以方便对定压驱动时间的极值研究。2014年,朱浩[85]指出,定压驱动时间关于活塞速度存在极大值,且这些极大值能够形成一条脊线,并通过数值计算结果归纳出脊线的若干性质。结果表明,在活塞压缩器的理论设计中,设计参数应选择靠近这条脊线的区域。
提高驱动段的驱动能力,主要有2种方式[86]:(1) 采用较高的压缩比,可以通过降低驱动段压力、提高高压储气室的压力、提高主膜片的破膜压力。(2) 提高驱动段氦气的浓度。较大的氦气浓度,可以提高驱动气体声速。2017年,Andrianatos指出[87],采用较轻的活塞和增大高压储气室的容积,能够有效提高驱动段的驱动能力,这主要是因为在此条件下,较小压力的高压储气室能够复现之前较高压力的高压储气室的驱动能力。Stennett指出[67],即使驱动段较短,在较重的活塞和较大浓度氦气的条件下,X3R自由活塞激波风洞的有效试验时间也能够达到6~10ms。
3.3.2 污染气体吸除
自由活塞高焓激波风洞的驱动气体经过反射激波在激波管近壁面形成的分叉区域[88](见图8),会对试验气体形成早期污染。在高焓情况下(大于10MJ/kg),反射激波与边界层干扰变得异常严重,污染甚至会使得试验时间小于1ms。对于大尺寸自由活塞高焓激波风洞,模型尺寸较大,为保证风洞定常流场所需的最少试验时间[3,10],必须减缓早期驱动气体的污染。T5风洞[89]、HEG风洞[90]、HIEST风洞[4,21]在激波管末端增加了一个套筒(如图9所示),在喷射的驱动气体和试验气体混合之前对驱动气体进行捕捉,对边界层进行抽吸。
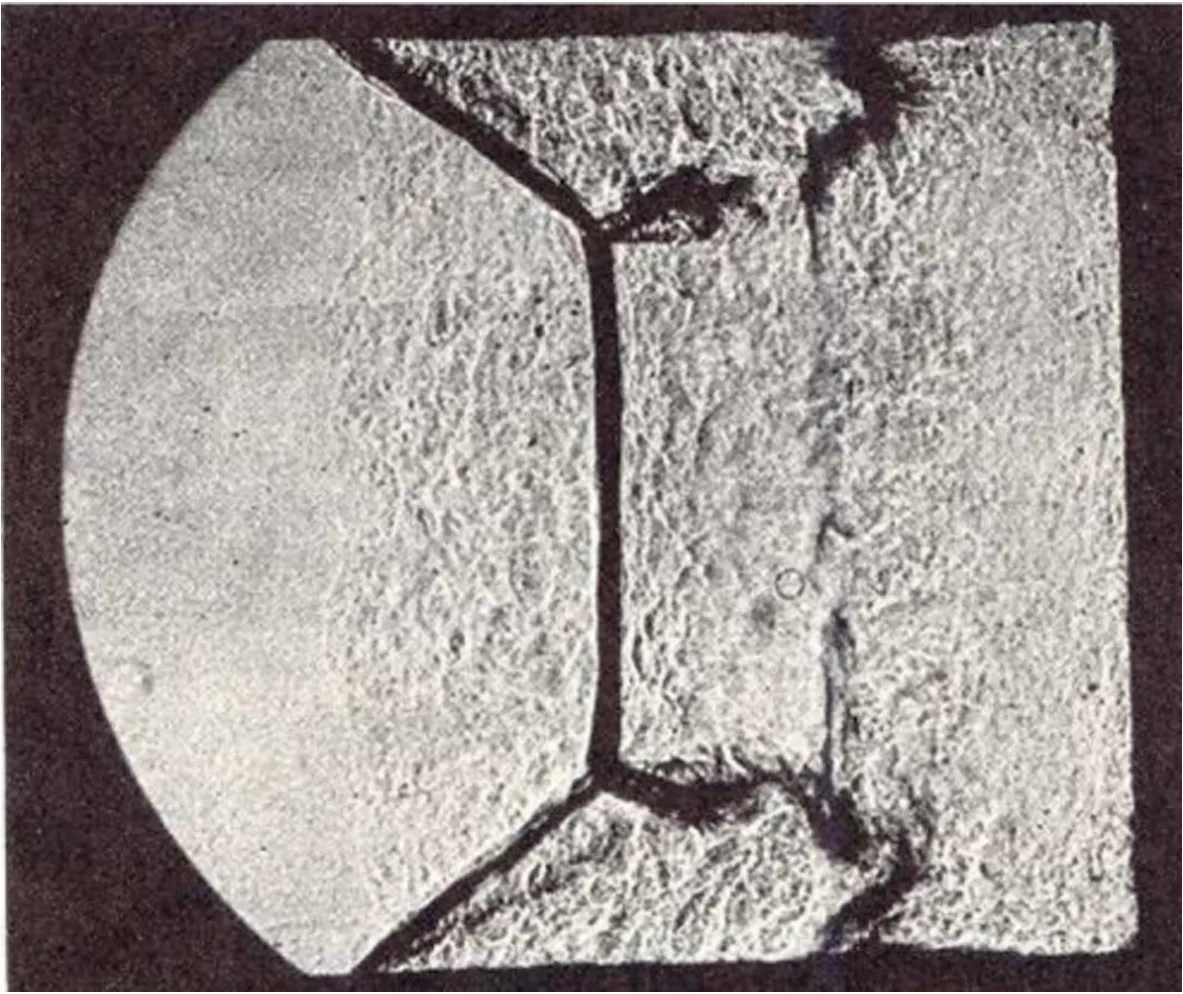
图8 反射激波与激波管边界层相互作用阴影图[88]
Fig.8Shadowgraphoftheinteractionofthereflectedshockwiththeshocktubewallboundarylayer[88]
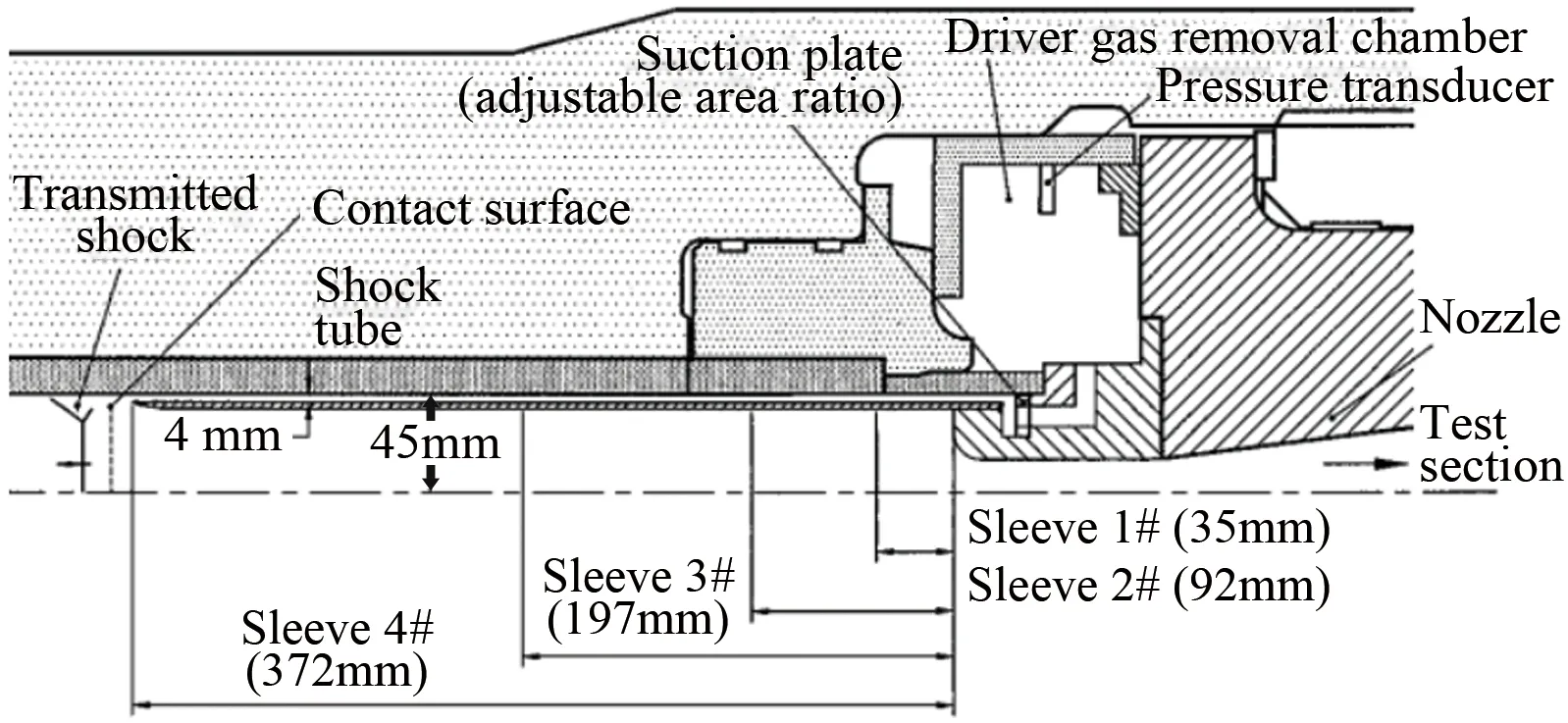
图9 驱动气体抽吸装置示意图[89]
4 自由活塞高焓脉冲风洞的试验能力
4.1 自由流场参数标定技术
在高焓风洞中产生的流场,其校测过程比低焓高超声速风洞要复杂得多。自由来流条件需要结合数值计算和传统的以及新发展的测试技术不断迭代,如图10所示。高焓流动,风洞试验和数值模拟之间是一个相互验证和相互促进的过程。这一过程又验证了新的测试技术和数学物理化学模型,进而深入了解设备的性能和相应的流动机理[10]。
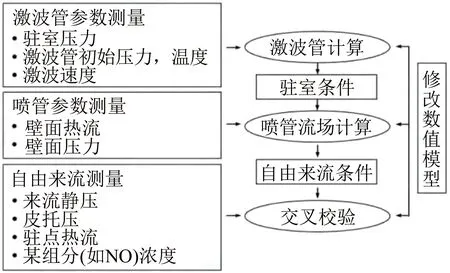
图10 结合试验和数值计算的自由来流参数调试流程[10,91]
Fig.10Combinedexperimentalandnumericaliterativeproceduretodeterminefreestreamconditions[10,91]
自由活塞高焓脉冲风洞驻室压力和皮托压力不太平稳,需要对试验数据进行适当的归一化处理来补偿压力变化带来的影响[92- 93]。例如,归一化皮托压是皮托压与喷管驻室压力之比,由于不同测量位置(喷管入口到皮托排架)之间存在测量时间间隔,在进行压力比较之前,需要对不同压力进行时间偏移处理[92];通过平板测量自由来流的静压时,需要对平板前缘25~76cm范围进行归一化处理,归一化静压采用静压除以喷管驻室压力[92];归一化热流采用热流除以喷管驻室压力的平方根,可以体现热流与压力的相关性[92- 93]。
4.2 气动热和压力测量
自由活塞高焓激波风洞试验段自由来流总温和总压高,试验时间短,试验模型在有效的试验时间内承受极高的热载荷和压力,这就要求传感器响应频率和灵敏度高、抗干扰和抗冲刷能力强[10]。在严苛的热流和来流环境下,热流测量通常使用点测量技术和面测量技术:同轴热电偶作为点测热传感器,其适用热流范围为20kW/m2~20MW/m2,响应频率高于100kHz,测量精度优于8%;温敏漆技术和磷光热图技术作为面测量技术,在中低焓激波风洞中的测热试验中得到广泛应用,但在总焓超过5MJ/kg时,材料的自发光效应严重,需要专门的滤光设备,Nagayama[94]和贾广森[95]等正在开展这方面的研究。利用压力传感器和压敏漆可以在常规激波风洞中进行压力测量,但是压敏漆相对于传统压力传感器而言,更会受到温度效应、信噪比等影响,导致其目前在高焓脉冲风洞应用较少[96]。
自由活塞高焓激波风洞能够开展高温气体效应研究。在总压50MPa、总焓变化范围8~23MJ/kg条件下,在HIEST风洞[4,97]中采用前方有/无安装光学窗口的同轴热电偶测量模型表面(如图11所示)的热流,并通过对比热流到达模型表面的时间,来获得辐射热流、对流热流在总热流的占比以及辐射热流在不同波长的分布。通过不同材料(BK7,MgF2, 金属硅)的玻璃,研究不同透明材料对辐射传热和对流传热的影响。相比无光学窗口测量的热流值,BK7和MgF2光学玻璃下游测得的热流值减少约40%。MgF2(截止波长200nm)光学玻璃下游测得的热流值比BK7(截止波长350nm)略大。通过金属硅窗口的热流几乎为零,根据金属硅只对红外波长透明这一属性,表明辐射热流对应的波长范围在非红外区。有光学玻璃的同轴热电偶获得热流值的初始时间比没有光学玻璃的迟约0.34ms,说明辐射传热的时间比自由来流到达模型的时间延迟0.34ms左右。利用高速纹影也能够清晰显示气流到达模型的时间与测量热流值存在一定的时间差。
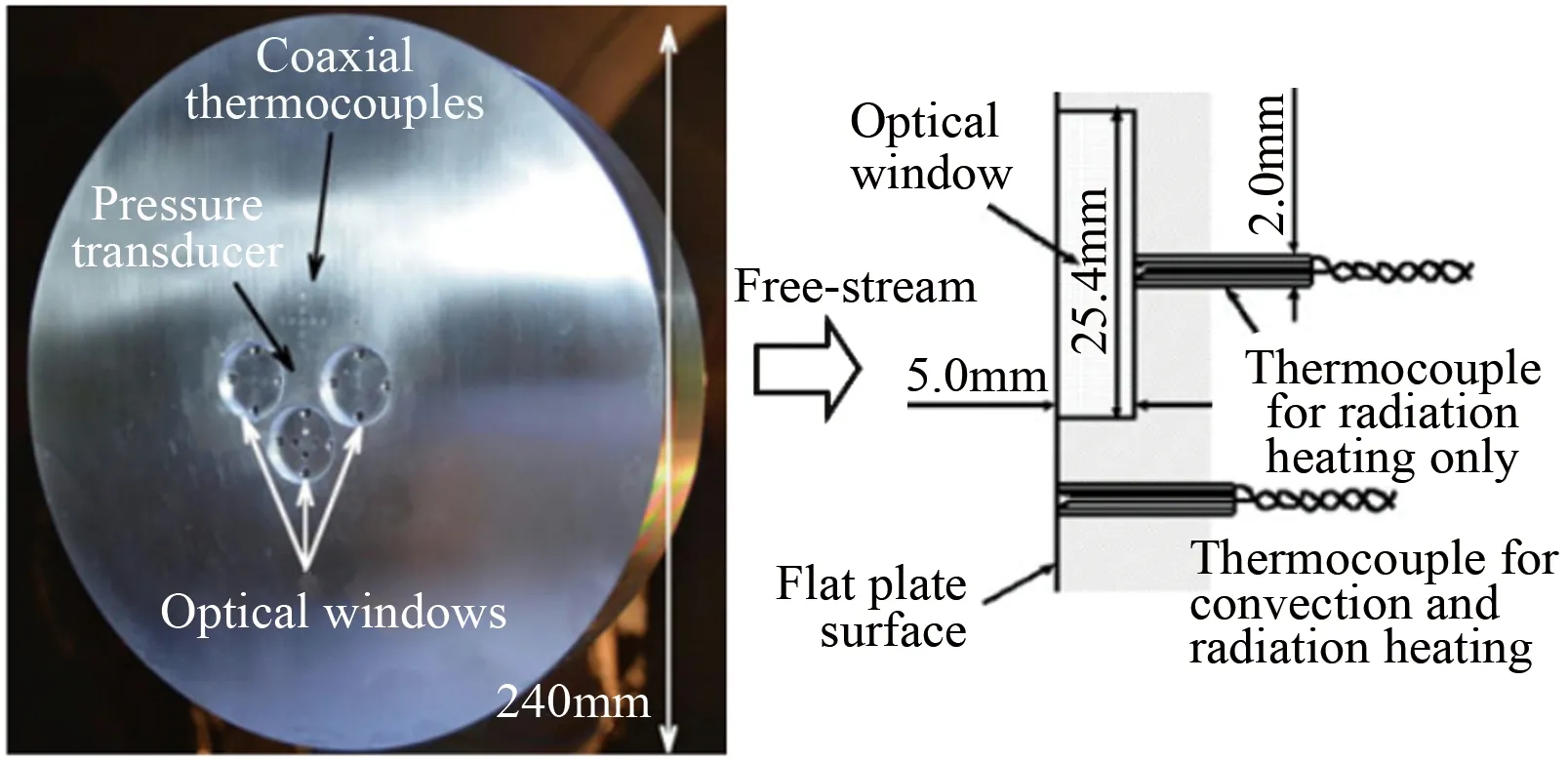
图11 辐射加热测量的试验模型[4]
4.3 气动力测量
自由活塞高焓激波风洞有效运行时间一般为几个毫秒,摩阻天平[10]、加速度计[98]和应力波天平[99]等具有响应快、跟随性好、对模型适应性强等特点,能够开展典型模型气动力的测量。
Roberson[99]利用应力波天平测量模型的升力、阻力和俯仰力矩,同时在模型上安装12个压力传感器和17个同轴热电偶,进行压力和热流测量(见图12)。模型长343mm,最大直径70mm,天平安装在129mm处(头部顶点为坐标原点)。试验条件:总焓12MJ/kg,自由来流马赫数7.8,静压790Pa。模型迎角变化范围0°~10°。测量结果表明:天平的轴向力误差为5%左右,法向力和力矩误差约为4%。
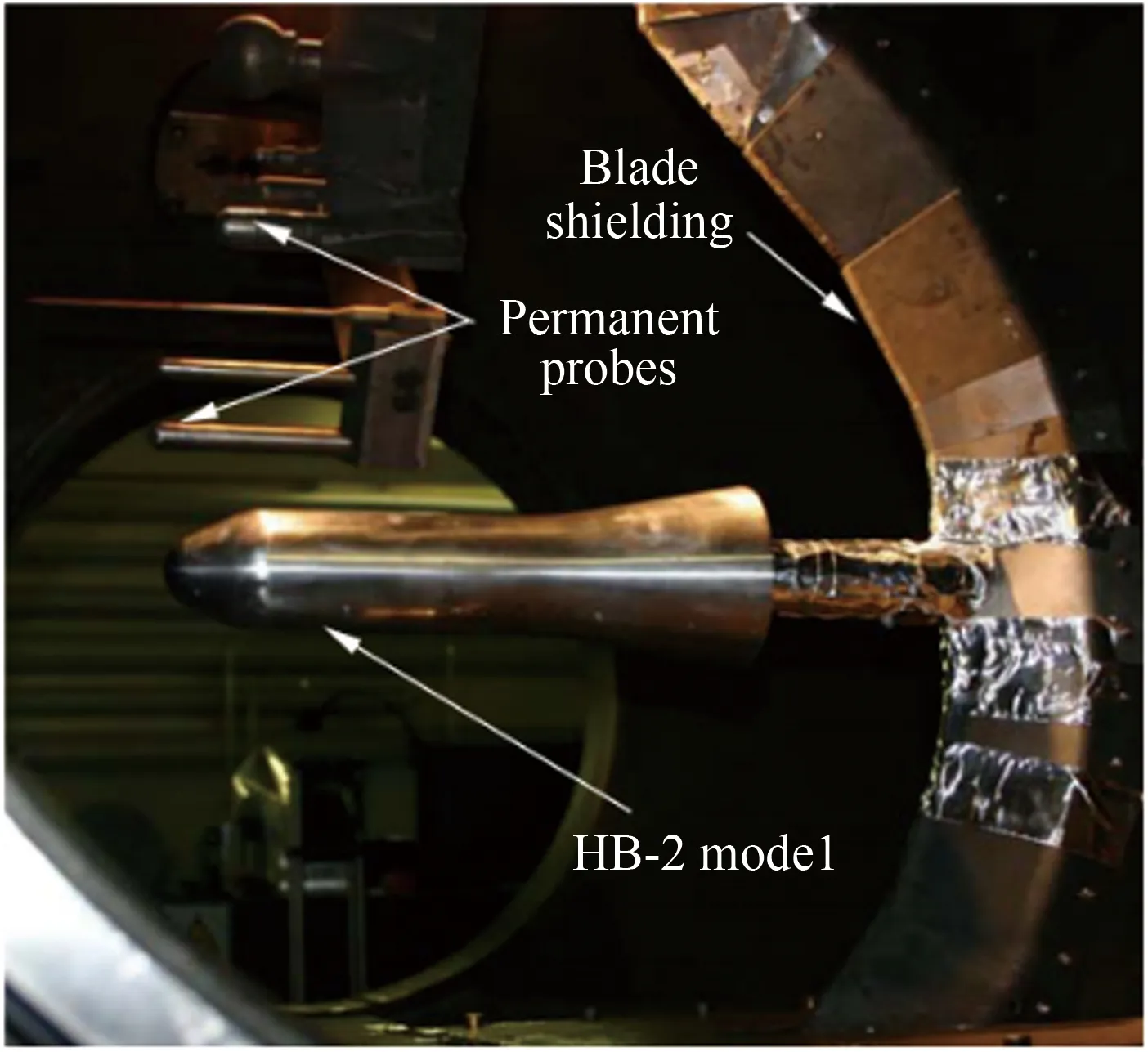
图12 HEG风洞尖锥和HB- 2模型[99]
4.4 超燃发动机试验技术研究
利用摩阻天平、加速度计和应力波天平等还可以进行超燃冲压发动机测力试验。Takahashi[98]利用加速度计测量超燃冲压发动机燃料注入后燃烧产生的推力,模型材质为A7075铝合金,长2.1m,重139kg。共安装13个加速度计,其中8个测量轴向加速度,其余测量径向加速度。同时以20个压力传感器进行压力测量。试验驻室条件:总焓分别为8、14和22MJ/kg,总压分别为20、40和60MPa。加速度计不仅能够测量模型的加速度,还能够获得其局部变形。试验测得模型加速度为10m/s2, 阻力大于1500N,测量结果符合预期。
自由活塞高焓激波风洞能够复现高超声速飞行环境,试验数据能够很好地与飞行环境关联,故其能够开展超燃冲压发动机点火试验。HEG开展了HyShot超燃冲压发动机模型1∶1点火试验[100](见图13(a)),模拟飞行高度32.5~27.1km,飞行马赫数约为7.8。在有限的试验时间内,完成氢燃料注入、发动机正常点火并稳定燃烧。利用Kulite压力传感器和同轴热电偶分别测量有/无燃烧条件下的壁面压力和热流。2007年,Itoh[101]在 HIEST开展HyShot- IV模型试验(见图13(b)),研究不同燃料射流模块对发动机效率的影响,试验结果与德国HEG风洞的结果吻合[102]。试验过程中,还就发动机试验的流场建立问题进行了专门的分析,并发展了基于加速计的发动机试验测力技术。
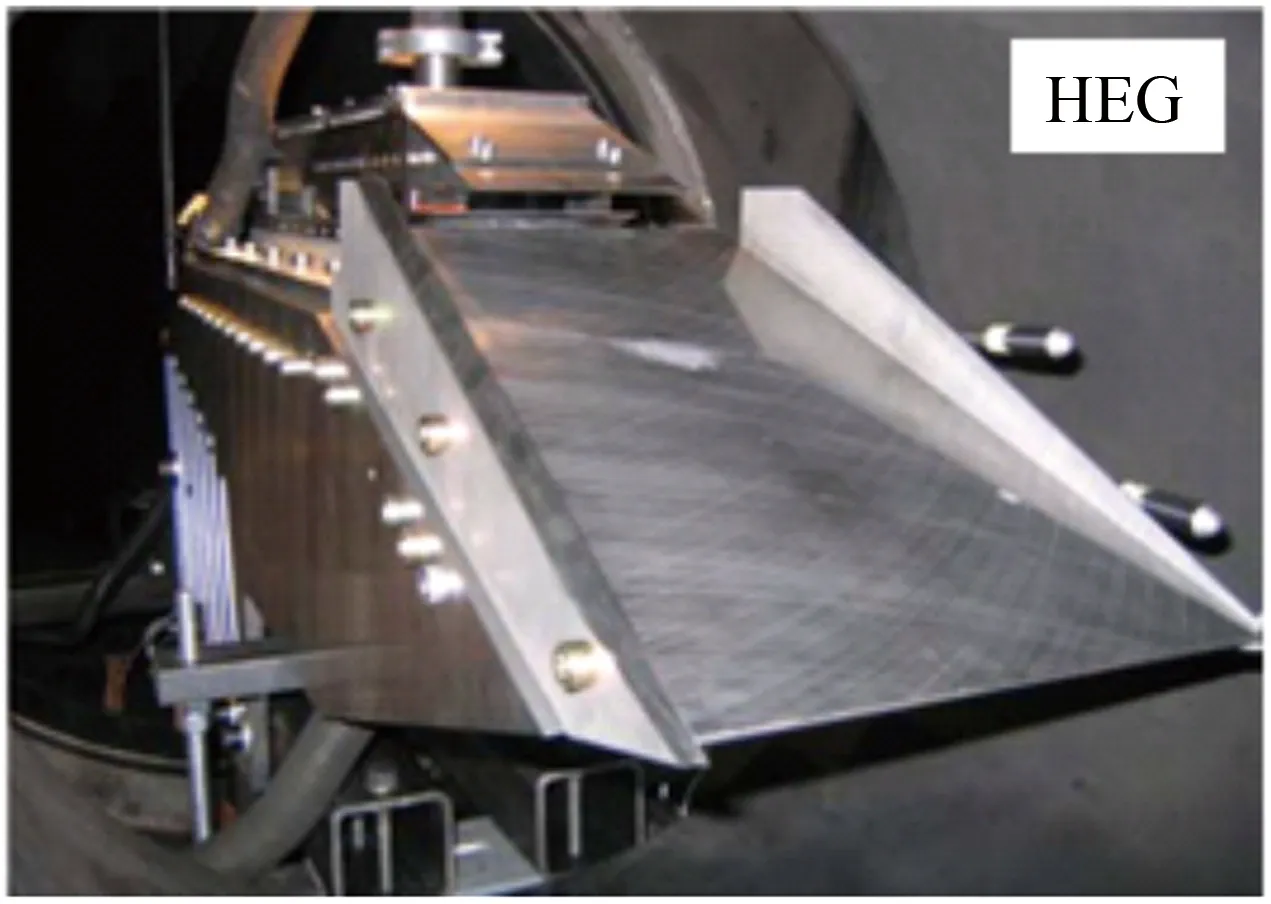
(a) HEG风洞HyShot- IV 模型[100]
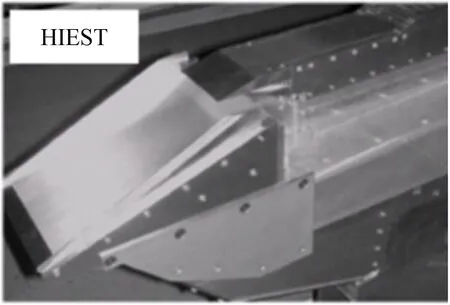
(b) HIEST风洞HyShot- IV 模型[101]
卢洪波[103]在FD- 21风洞完成了氢氧燃烧推进试验,在总压13MPa条件下,实现了5ms时间内、氢气在速度近3km/s的试验气流中的自主燃烧,并获得了超声速燃烧模态下的试验数据和火焰图像(见图14)。该试验的成功,标志着FD- 21风洞正式迈入实用化阶段。
4.5 高超声速边界层转捩研究
自由活塞高焓激波风洞不仅能够进行常规地面条件下的边界层转捩研究,还能开展飞行环境下的边界层转捩的研究。Tanno[104]利用PCB32A37压力传感器测量半锥角7°、长1.1m的尖锥模型(见图15)表面的压力,观察某特征频率二阶模态的不稳定性。考察在总焓为7MJ/kg、单位雷诺数为2.1×106/m条件下,尖锥不同位置处功率谱密度(PSD)随频率的变化,可以明显地看到在x=572mm处、频率为600kHz条件下二阶模态的不稳定性[104]。
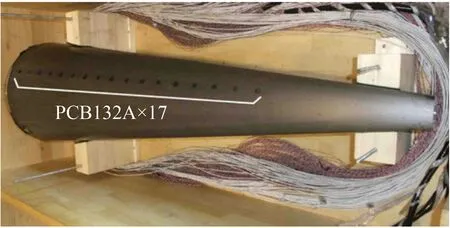
图15 半锥角7°尖锥模型[104]
4.6 自由飞试验研究
HIEST风洞利用微型板载数据记录仪研究HTV- R模型在流场中的自由飞过程[105](见图16),模型长0.316m,质量19.75kg。在总焓分别为4和16MJ/kg时,对应的总压分别为14和16MPa,测量在低焓和高焓条件下模型的轴向力、法向力和俯仰力矩。模型在运动过程中,迎角变化范围为14°~32°。轴向力和法向力在不同焓值条件下的差别很小,高焓条件下的压心向模型上游移动。
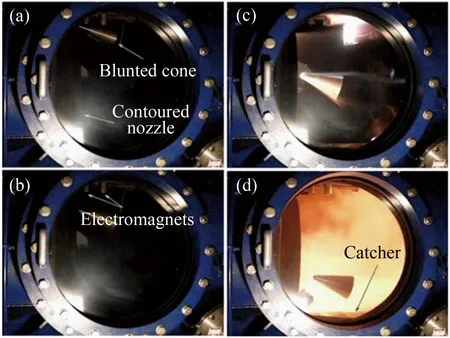
图16 模型下落过程[105]
4.7 气动光学研究
光学制导的高速飞行器在大气层内飞行时,受到头部强激波和壁面气流黏性干扰,使得混合层气体密度梯度较大,导致信号光束发生波面畸变和偏折。在风洞试验中必须复现引导头的高温辐射特性,确定窗口的冷却需求和主动冷却过程中带来的窗口光学失效,以及评估存在转捩混合流、湍流及化学反应流的工况下轨控发动机导致的窗口失焦和喷流干扰效应。利用全息干涉仪可以在自由活塞高焓脉冲风洞中开展THAAD引导头气动光学试验[106](见图17)。T5风洞驻室条件为15MJ/kg, 总压50MPa, 自由来流超过5km/s。T5能够成功复现飞行环境,试验观察到强烈的高温气体效应。
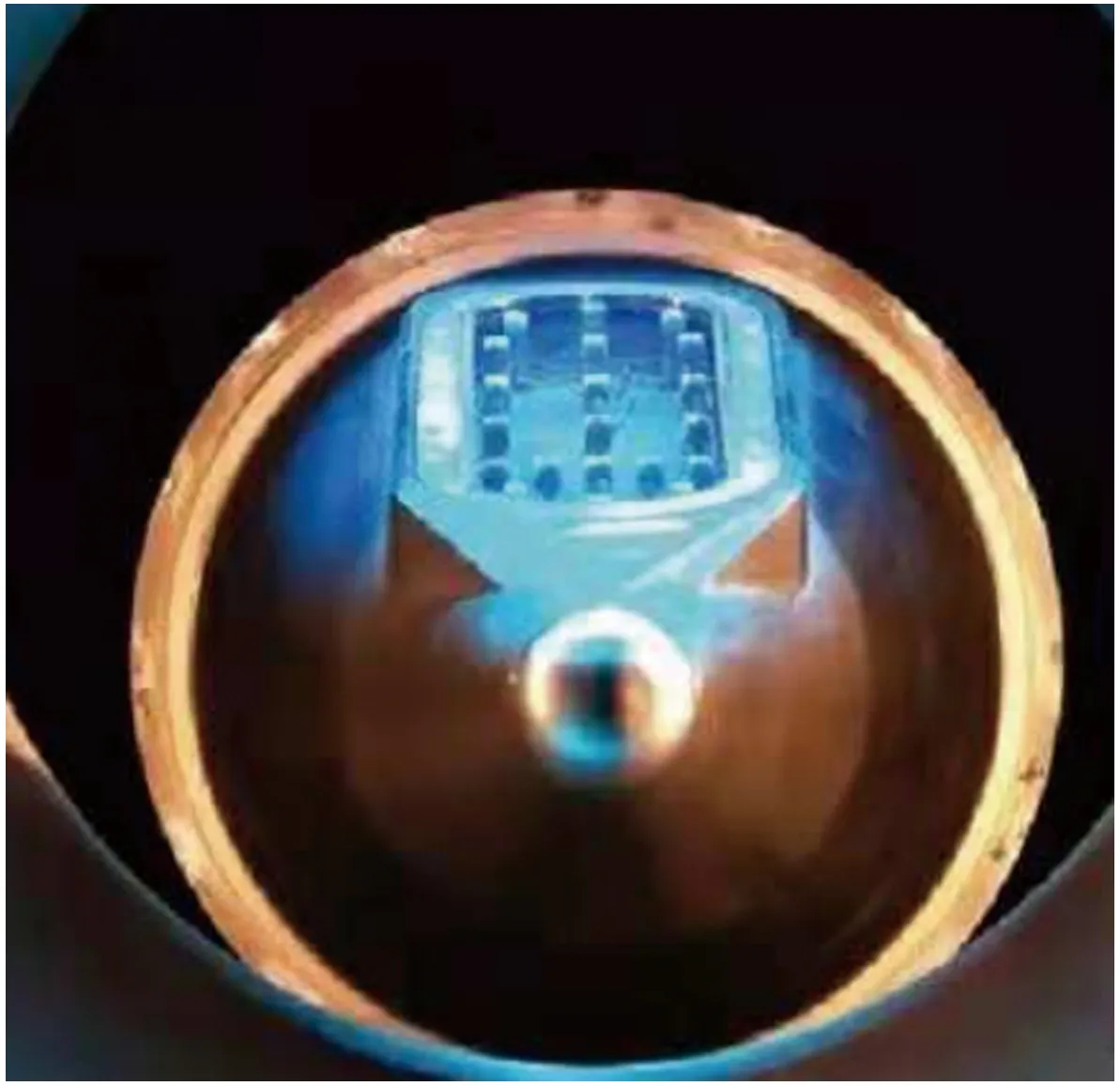
图17 THAAD 气动光学试验[106]
4.8 电磁辐射技术研究
X2膨胀管利用光谱仪和高速相机等设备研究Hayabusa前体1∶10模型防热罩的辐射现象[107],防热罩有2种材料:无涂层的钢和涂有环氧树脂的钢。在高压储气室空气压力1.0MPa、压缩管氦气压力30kPa、激波管空气压力3.1kPa、加速管空气压力10Pa条件下,喷管出口能够产生约9.8km/s的自由来流。结果表明,涂有环氧树脂的钢模型周围的烧蚀层中,主要的辐射是由CN 谱带产生的,而C2Swan谱带是造成该层中大部分可见光发射的原因。在无涂层的钢模型表面流场中,没有C2Swan谱带辐射,并且CN辐射在模型表面附近大大减少。由于在X2膨胀管获得了满意的试验结果,也为了开展更大尺寸模型的试验,昆士兰大学对X3膨胀管进行了升级改造,使之具备测量电磁辐射的能力[108]。
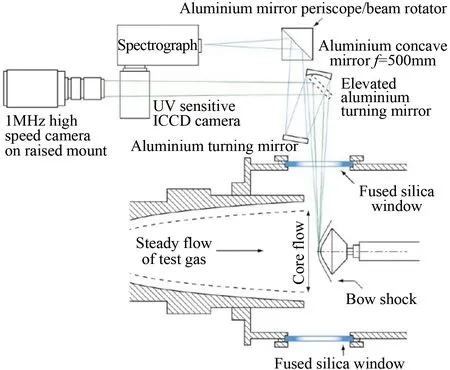
图18 利用光学仪器探测Hayabusa模型流场示意图[107]
Fig.18IllustrationoftheconfigurationofopticalinstrumentsusedtoprobetheHayabusaflowfield[107]
4.9 采用光谱测量技术的流场诊断
20世纪80年代开始,非接触式光学测量技术被广泛应用于流场诊断和气体组分浓度测量,具有灵敏度高、非接触与时空分辨率高等优点。目前,用于高焓激波风洞测量的光谱技术[10]主要有激光诱导荧光技术(PLIF)[109]、可调谐激光二极管吸收光谱技术(TDLAS)[110]与相干反斯托克斯拉曼散射技术(CARS)[111]。
4.9.1 PLIF技术
由于PLIF具有非接触、高时空分辨率的特点以及多点、多参数同时测量的优势,广泛用于流场显示和定量测量,如温度、浓度、速度和压力测量等。T5风洞可模拟高度25~40km、飞行马赫数10和13的自由来流环境。在T5风洞利用PLIF方法进行了超燃流场诊断[112](见图19),基于双波长OH- PLIF和高速纹影技术,获得氢氧基相对浓度分布。
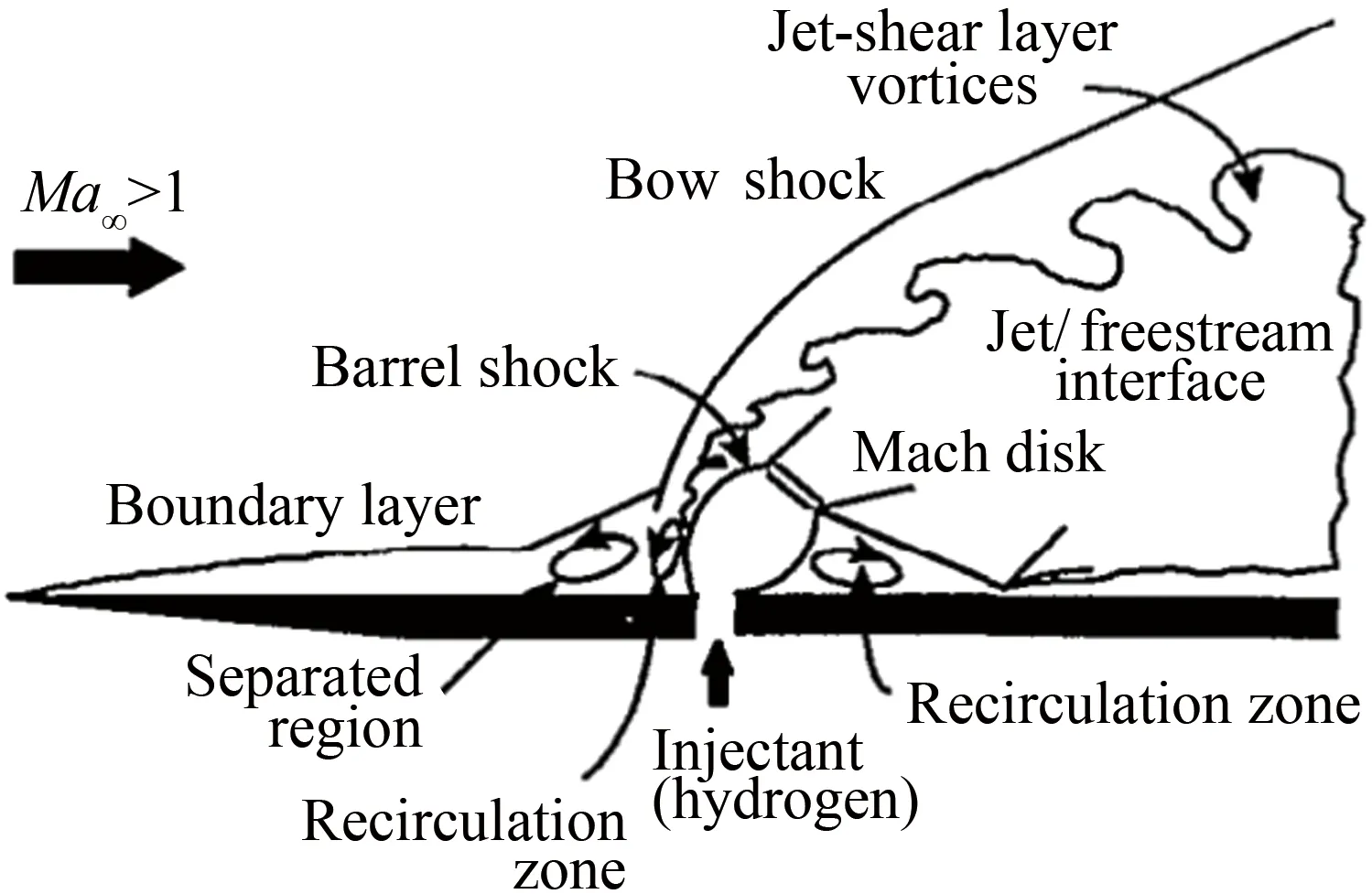
(a) 超声速流场氢气横向注入示意图
4.9.2 TDLAS技术
TDLAS技术灵敏度高、结构相对简单且成本低廉,基于光纤技术,便于组网形成阵列,可实现不同气体组分浓度(包括CO2、CO、H2O、HF、CH4等)和温度场测量;基于激光多普勒效应,实现流场速度和质量流量的测量。T- ADFA风洞[113]在总焓13.5MJ/kg、总压2.96MPa条件下,利用燃烧室出口的温度测量结果,成功获得超燃的燃烧振荡现象(见图20)。
4.9.3 CARS技术
宽带CARS技术实现了时间分辨测量,可测量不稳定的燃烧和实际火焰。利用宽带和双泵浦CARS技术,可以得到极高的时间分辨率,能够测量高焓风洞自由来流气体温度、密度和浓度。图21所示为总焓8.4MJ/kg、总压20MPa条件下, 利用CARS技术测量T3风洞的自由来流,获得自由来流的温度场,并验证自由来流是非平衡流。
5 结 论
自由活塞脉冲风洞能够复现超高速飞行器的飞行环境,模拟飞行条件下飞行器的气动热、气动力以及推进系统性能,加之运行灵活性好,因而得到广泛的发展和应用。
(1) Stalker对自由活塞高焓脉冲风洞的先导性探索,为风洞的实用化奠定了基础。随着轻质气体驱动、变截面驱动、定压驱动、缝合接触面和污染气体吸除等技术的建立,加之自由活塞运动理论体系的完善,使自由活塞脉冲风洞得以成功建设并实现大规模应用。
(2) 由于试验气体离解、电离和辐射的影响,自由活塞激波风洞的总焓会小于25MJ/kg。为了避免反射型激波风洞存在的自由流非平衡现象,同时为了进一步提高试验气体总焓,需要使用自由活塞驱动的膨胀管风洞,其总焓能够超过40MJ/kg。
(3) 现代测试技术和流场诊断技术的发展,使得自由活塞高焓脉冲风洞不仅能够在毫秒量级的试验时间内开展气动热、表面压力和热辐射的测量,还能利用高灵敏度的天平开展气动力的测量。利用现代测试和光学技术,自由活塞高焓脉冲风洞能够开展高焓气流高温气体效应、边界层转捩和气动光学的研究,还能开展模型自由飞试验以及超燃发动机的燃烧诊断等方面的研究。
