基于水介质导电特性的水下信号传输方法及应用
2020-01-08梁奇兵施黎明赵海潇
梁奇兵, 吴 飞, 施黎明, 赵海潇
基于水介质导电特性的水下信号传输方法及应用
梁奇兵, 吴 飞, 施黎明, 赵海潇
(昆明五威科工贸有限公司, 云南 昆明, 650000)
为了在注满水的金属容器内外之间实现近距离无线信号传输, 文中提出了一种利用水介质导电特性进行水下信号传输的方法。首先分析了基于水介质导电特性进行信号传输的理论模型, 在此基础上设计了一套通信系统, 并搭建了试验测试系统, 验证了此种无线信号传输方法的可行性。在试验条件下, 电极相距40 cm内可以9.6 kbit/s的传输速率无误码传输信号。文中所提方法及系统可实现水下航行器内部测控系统和发射管外部通信控制系统间数据和指令的无线传输, 提高试验效率。
水下航行器; 信号传输; 无线通信; 水介质; 导电特性
0 引言
大深度模拟水深试验设施可为多种水下航行器发射试验提供模拟大深度水深的试验环境, 可利用其开展诸多水下航行器发射装置研发过程中必不可少的相关试验, 对实现水下航行器发射系统大深度发射起着至关重要的作用[1]。在水下航行器的研发测试阶段, 水下航行器中的内部测控系统能实时记录水下航行器发射和运行过程中内外环境参数(加速度、偏转角、速度、位移和外液压力)[2], 试验中时常需要对水下航行器发射出管运动参数进行快速回放, 通过这些试验数据, 科研人员能进一步分析和掌握发射装置和水下航行器各方面性能。然而如何快速获取水下航行器内部测控系统中采集存储的试验数据成为工作人员头疼的问题, 目前的做法是通过有线电缆回放试验数据, 这一方式往往要在发射管舱盖上开孔或者每次泄压排水打开舱盖。舱盖开孔存在漏水的问题, 且有线电缆多次反复拖拉会降低使用寿命和信号传输可靠性; 而每次泄压排水打开舱盖也是一个繁琐且耗时的过程, 不利于多次重复试验, 大大增加了操作人员的工作量, 降低了试验效率。
项目研究人员通过对一种水下无线信号传输方式的研究[3], 实现了对现有大深度模拟水深试验设施水下发射试验中获取测试数据方式的改进, 从而提高了试验效率。目前水下无线通信方式主要包括水下电磁波通信、水声通信和水下光通信, 他们具有不同的特性及应用场合。无线电磁波[4]在海水中衰减严重, 频率越高衰减越大, 低频长波无线电波水下试验可达6~8 m的通信距离, 30~300 Hz的超低频电磁波水下通信距离可达100 m, 但发射功率大, 需要很长的天线[5]。水下电流场通信[6]是一种新型的水下电磁波通信方式, 采用电偶极子板对收发信息, 通过海水中交变电流场实现信号传输, 适用于水下近距离传输, 但发射电偶极子板和接收电偶极子板安装相对位置具有严格的要求, 信号发射和接收具有较强的方向性。水声通信[7]无疑是目前运用最广泛的水下无线通信方式, 已广泛应用于水下通信、传感、探测、导航和定位等领域。声波在水下传输信号衰减小, 传输距离远, 通信距离可覆盖几百米至几十千米, 但传输速率低, 适用于温度稳定的开阔水域。水下光通信技术[8]利用激光载波传输信息, 通常采用蓝绿激光[9]作为载波, 具有较高的传输速率, 在超近距离下, 传输速率可达100 Mbps级, 但水下蓝绿激光通信应用于浅水近距离通信存在固有困难, 易受水中悬浮颗粒及浮游生物散射影响, 高精度瞄准和实时跟踪困难。
由于大深度模拟水深试验设施发射管内空间狭小且为密闭高压的金属仓, 应用现有常规水下无线通信方式存在诸多问题。无线电磁波通信发射功率大, 需要长天线, 空间受限; 水下电流场通信发射电偶极子和接收电偶极子安装位置有严格的要求, 直接影响通信质量; 水声通信更适合于长距离无遮挡的开阔水域使用, 在这种较狭窄的金属水仓中, 超声波极易反射和形成驻波干扰, 且传输速率低; 水下光通信易受散射影响, 要求光束对准精度高。因此, 应用现有水下无线通信技术难以实现水下航行器和水下发射管无线信号传输。
文中提出了一种利用水介质导电特性进行水下无线信号传输的方法, 用于大深度模拟水深试验设施发射管外部通信控制系统与水下航行器内部测控系统间进行无线信号传输。
1 信号传输原理
利用水介质导电特性进行水下无线信号传输示意图如图1所示。信号发送/接收模块M通过信号电缆C连接到伸入水中的电极E, 信号发送/接收模块M通过信号电缆C连接到伸入水中的电极E,M和M均通过共地电缆与金属容器壳体共地,E和E与金属容器壳体绝缘,M和M之间利用水介质的导电特性可实现半双工无线信号通信。

图1 基于水介质导电特性的水下信号传输示意图
水介质是一种导体, 导体具有电阻特性, 对水介质施加一定电压, 水介质中便有电流流过, 在不同位置便形成不同的电压差, 因此利用水介质导电特性进行信号传输的理论模型如图2所示。经过调制加载数据信息的载波输入信号V接入到由导电水介质形成的电阻阵上, 便产生了电流, 同时形成不同电压差, 通过在电阻阵的某一特定位置引出输出信号V, 再对V进一步后续滤波、放大和解调处理, 可得到传输的原始数据信息, 从而实现水下无线信号传输。其中V的大小与流过水介质导体的电流和分压电阻的大小有关。水介质中发射电极和接收电极相距越远, 输出端分压电阻越小,V越小, 因此可通过增大输入驱动电流提高通信距离。

图2 基于水介质导电特性的水下信号传输理论模型
2 信号传输实现方法及系统
根据信号传输原理可知, 基于水介质导电特性的水下信号传输系统与数字通信系统原理基本一致[10]。首先需要将待传输的数据信号加载到载波信号上, 载波信号沿着电缆和水介质传输, 最终被接收端接收并从载波信号上分离出传输的数据信号, 从而实现信号传输功能。基于水介质导电特性的水下信号传输系统主要由发射电路、接收电路和收发一体电极组成, 系统框图如图3所示。
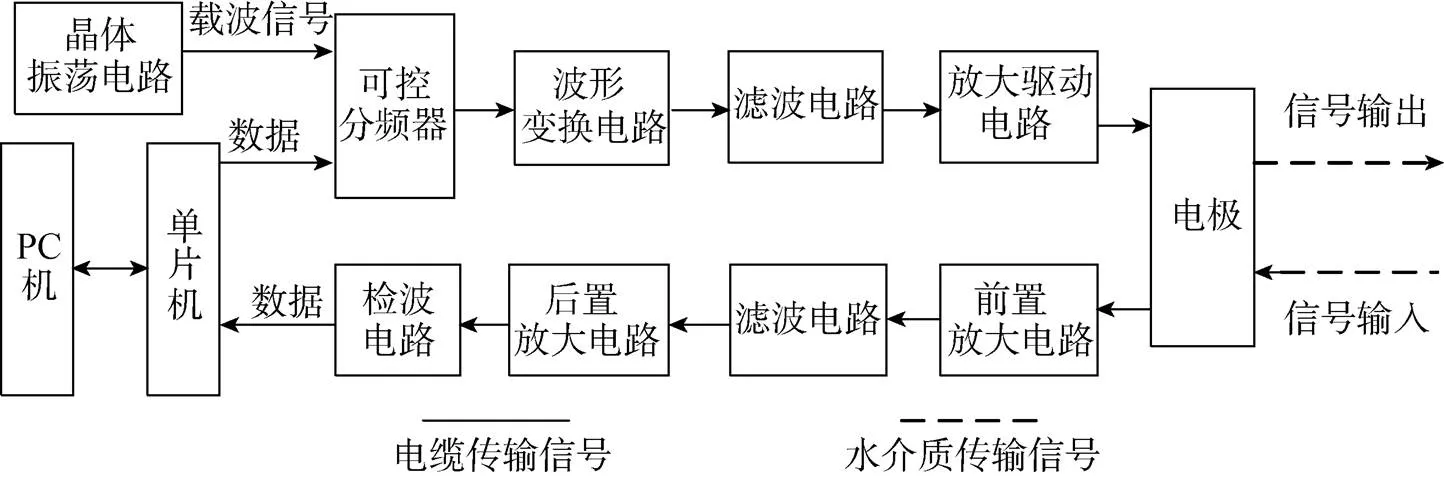
图3 基于水介质导电特性的水下信号传输系统框图
发射电路部分主要由晶体振荡电路、单片机控制的分频电路、波形变换电路、滤波电路和放大驱动电路组成。高频载波信号由晶体振荡电路产生, 并通过分频器降频处理, 个人计算机(per- sonal computer, PC)中待发送的数据通过RS-232串口发送到单片机。单片机接收到数据信号并通过异步串行(universal asynchronous receiver/trans- mitter, UART)通信串口的数据发送端(transmit data, TXD)输出到可控分频器控制端口。通过数据信号高低电平可有效控制分频器分频信号输出情况。当分频器控制端口为高电平, 分频器输出端口有分频信号输出; 当分频器控制端口为低电平, 分频器输出端口无信号输出。即数据信息和载波信号叠加的过程中, 数据信号高电平对应有分频信号输出, 数据信号低电平对应无分频信号输出, 从而将数据信息加载到高频载波上。加载数据信息的调制波信号经过后续波形变换电路、滤波和放大驱动电路, 最终由电极接入到水介质导体中, 实现信号的发送。
接收电路部分主要由前置放大电路、滤波电路、后置放大电路和检波电路组成。接收电极接收到微弱调制波信号后, 首先需要经过放大和滤波处理后进入检波电路。检波电路对接收的调制波信号具有选频功能, 并将接收的调制波信号幅值与设定阈值进行比较。当调制波信号幅值高于设定阈值, 检波电路输出高电平; 当调制波信号幅值低于设定阈值, 检波电路输出低电平, 从而实现调制波信号解调功能, 还原得到原始传输的数据信号, 并通过单片机串口发送到PC机, 最终实现数据信息接收。收发一体化电极分时用于发射和接收水中传输信号, 可交替工作, 具备半双工通信功能。该系统采用发射电路和接收电路双频工作模式, 可有效避免发射和接收串扰问题。
为了验证基于水介质导电特性的水下信号传输系统的可行性和性能, 搭建了相应的水下无线信号传输试验测试系统, 如图4所示。

图4 基于水介质导电特性的水下信号传输试验系统
金属圆柱体水仓体积为50 cm×80 cm, 仓内满水, 金属仓体两端面均设有电极安装孔, 用于将电极E和E固定安装到金属仓端面壳体上。电极采用硬质单芯铜线, 长50 cm, 并与金属仓壳体绝缘, 两电极一端穿过电极安装孔伸入到金属仓内导电水介质中, 另一端通过信号电缆连接到通信模块信号输入和输出口上, 硬质铜线电极伸入水中的长度可通过推拉铜线电极调节。
试验系统使用M和M共2套信号发送/接收模块,M通过RS-232串口与PC机相连, 各通信模块通过共地电缆焊接到金属仓壳体上, 实现通信模块与金属仓壳体共地。
试验中M发送端将PC机发送过来的字符串数据不间断地通过信号电缆C和电极E发送到水介质中, 一次发送一帧, 每一帧包括64 bit的字符串信息, 以及头字符“ # ”和结束字符“!”; 水中传输的数据信息沿电极E和信号电缆C传输到M,M接收端检测到头字符“ # ”时开始接收并存储数据, 当字符个数达到64, 且接收到结束字符“!”后停止数据接收跳出接收中断, 并将接收的数据再通过M发送端回传到水介质中,M接收数据并校验正确后通过串口发送到PC机, 从而实现了数据信息半双工通信, 通过多次数据传输试验发现, 当两电极端部相距40 cm以内时, 该系统在9.6 kbit/s的传输速率下, 可实现无误码信号稳定传输。
3 试验测试与分析
将以上基于水介质导电特性的水下无线信号传输系统嵌入大深度模拟水深发射试验设施水下发射装置中, 可实现发射管外部通信控制系统与水下航行器内部测控系统数据和指令等信号的无线传输, 如图5所示。
该系统包括嵌入外部信号发送/接收模块的外部通信控制系统、外部信号电缆、外部电极、注满水介质的发射管、水下航行器、内部电极、内部信号电缆、嵌入内部信号发送/接收模块的内部测控系统, 共地电缆、导电拖链和钢丝拉绳组成。其中, 外部通信控制系统的信号发射/接收模块接口通过外部电缆连接到安装在发射管靠近舱盖尾端壳体上的外部电极, 外部通信控制系统通过共地电缆与发射管壳体共地; 内部测控系统的信号发射/接收模块接口通过内部信号电缆连接到安装在水下航行器尾端壳体上的内部电极, 水下航行器通过导电拖链与发射管壳体共地, 电极均采用收/发共用一体化结构设计, 分时用于发射和接收信号, 具备半双工信号传输功能, 外部钢丝拉绳穿过发射管尾端舱盖通孔固定到水下航行器尾端。发射试验结束后, 首先通过钢丝拉绳将水下航行器拉回到发射起始位置, 确保水下航行器壳体上电极和发射管壳体上电极间距在可靠信号传输范围内(≤40 cm), 由外部通信控制系统通过外部电极将试验数据回传指令接入到导电水介质中, 内部电极接收到指令后, 由内部测控系统将实时采集存储的发射过程内弹道数据(加速度、偏转角、速度、位移和外液压力)加载到高频载波信号上, 并通过内部电极连接到导电水介质中, 进而外部通信控制系统通过信号接收模块将信号检波、解调处理, 恢复出原始采集数据, 实现试验数据回传, 从而可实现大深度模拟水深发射装置内外系统间指令和数据无线传输功能。

图5 大深度模拟水深试验设施水下发射装置无线信号传输示意图
图6显示了采用大深度模拟水深发射试验设施水下发射装置无线信号传输试验系统获取的水下航行器发射出管运动过程中内部测控系统记录的轴向加速度、速度和位移数据, 3次测试结果基本重合, 试验用水下航行器发射出管运动最大加速度达3.6, 最大速度达14.9 m/s, 最大位移达18.7 m。测试结果与真实值一致, 从而有效验证了该信号传输系统的可靠性和准确性, 且大大提高了试验测试效率。

图6 水下航行器发射出管运动轴向加速度、速度和位移曲线
要实现该试验系统信号可靠传输, 需确保水下航行器与发射管壳体间共地的导电拖链接触良好, 尽量减小共地电阻, 同时需确保外部电极和内部电极间距在要求范围内。
4 结束语
文中介绍了一种利用水介质导电特性进行水下信号传输的方法, 分析了其理论模型, 并以此为基础设计了基于水介质导电特性进行水下无线信号传输的通信系统, 并进行了无线信号传输试验验证。在试验条件下, 可实现40 cm范围内以9.6 kbit/s的传输速率无误码传输信号。最后将该系统成功应用到大深度模拟水深试验设施水下发射装置上, 实现了水下航行器内部测控系统和发射管外部通信控制系统间数据和指令的无线传输, 大大提高了试验测试效率, 解决了实际工程应用问题。未来还应从2个方面开展研究: 一是增加通信距离, 实现更大范围的数据传输; 二是进一步降低功耗和提高通信速率及可靠性。
[1] 董明阳. 大深度假海试验设施内流场仿真分析[D]. 北京: 中国舰船研究院, 2015.
[2] 乔汝椿. 轻型舰载鱼雷发射装置鱼雷出管运动分析[J]. 鱼雷技术, 2000, 8(3): 44-46.
[3] 王毅凡, 周密, 宋志慧. 水下无线通信技术发展研究[J]. 通信技术, 2014, 47(6): 589-594.Wang Yi-fan, Zhou Mi, Song Zhi-hui. Development of Underwater Wireless Communication Technology[J]. Communications Technology, 2014, 47(6): 589-594.
[4] 张丰伟. 水下无线中长波通信机的设计与实现[D]. 大连:大连理工大学, 2013.
[5] 杨卓. 对海水天线的初步研究[J]. 舰船电子工程, 2011, 31(12): 101-103, 107.Yang Zhuo. Preliminary Research on Seawater Antennas[J]. Ship Electronic Engineering, 2011, 31(12): 101- 103, 107.
[6] 汪丹丹, 王永斌, 陈斌. 设计水下电流场通信系统需注意的几个问题[J]. 舰船科学技术, 2010, 32(2): 56-58.Wang Dan-dan, Wang Yong-bin, Cheng Bin. The Attentive Problems in Designing Underwater Electric Current Com- munication System[J]. Ship Science and Technology. 2010, 32(2): 56-58.
[7] 贾宁, 黄建纯. 水声通信技术综述[J]. 物理, 2014, 43(10): 650-657.Jia Ning, Huang Jian-chun. An Overview of Underwater Acoustic Communications[J]. Physics, 2014, 43(10): 650- 657.
[8] 王燕飞, 刘文利, 丁楠, 等. 水下无线光通信简介[J]. 仪表技术, 2018(7): 48-51.
[9] 李宏升, 岳军. 蓝绿激光水下通信技术综述[J]. 遥测遥控, 2015, 36(5): 16-22.Li Hong-sheng, Yue Jun. Review of the Underwater Communication Technology Using Blue-green Laser[J]. Journal of Telemetry, Tracking and Command, 2015, 36 (5): 16-22.
[10] 赵慧聪. 水下无线数字收发系统研究[D]. 大连: 大连理工大学, 2013.
(责任编辑: 许 妍)
Underwater Signal Transmission Method and Application Based on Conductivity of Water Medium
LIANG Qi-bing, WU Fei, SHI Li-ming, ZHAO Hai-xiao
(Kunming Wuwei Technology Engineering & Trade Co. Ltd, Kunming 650000, China)
To realize short-range wireless signal transmission between the inside and outside of a sealed metal container filled with water, a method for underwater signal transmission using conductivity of water medium is proposed. Firstly, the theoretical model of signal transmission based on conductivity of water medium is analyzed. Then, a communication system based on conductivity of water medium is designed for underwater wireless signal transmission, and a test system is built to verify the reliability of this wireless signal transmission method. Under the testing condition, the electrodes can transmit signals without error at a transmission rate of 9.6 kbit/s when their spacing is within 40 cm. The proposed method and system can realize wireless transmission of data and instructions between the internal navigation control system and the external communication control system of launch tube, and ultimately improve test efficiency.
underwater vehicle; signal transmission; wireless communication; water medium; conductivity
TJ635;TN929.3
A
2096-3920(2019)06-0711-05
10.11993/j.issn.2096-3920.2019.06.016
2018-12-06;
2019-01-04.
梁奇兵(1988-), 男, 硕士, 工程师, 主要从事水下运载器及通信装置研发.
梁奇兵, 吴飞, 施黎明, 等. 基于水介质导电特性的水下信号传输方法及应用[J]. 水下无人系统学报, 2019, 27(6): 711-715.
