多波束测深仪在航道测量的应用分析
2020-01-03何民华
何 民 华
(交通运输部南海航海保障中心广州海事测绘中心,广东 广州 510000)
1 概述
近年来随着国家经济的发展,一带一路的推进和海洋强国战略的推进,海洋活动越加的频繁,航道测量的作用愈加的重要。为了保证经济的稳定快速发展,保障船舶的航行安全以及海洋工程的需求,必须定期对航道进行检查测量。本文以广州港为例,对航道检测测量的过程方法以及注意事项进行实践分析,同时对相关问题提出合理的建议。
2 测区概况及工作流程
1)广州港濒临南海,毗邻香港、澳门,位于珠江水系的东、西、北三江交汇点。铁路、公路、航空、水路运输发达,既是华南地区最大的国际贸易港,又是珠江三角洲水网运输中心和水陆运输枢纽。检查测量图均位于广州港。根据J2019—011舢舨洲附近检查测量测绘任务书要求,按照检查测量要求进行,测量比例尺为1∶10 000,采用2000国家大地坐标系,高斯—克吕格投影,中央子午线为114°,深度基准面采用理论最低潮面,质量目标为优秀。
2)外业测量作业过程分为测前准备阶段、外业测量阶段、资料检查三个阶段。
a.测前准备阶段:主要工作为资料收集,技术交底,仪器和耗材准备,设备调试等;
b.外业测量阶段:外业测量阶段主要工作为:进行GPS比对、仪器安装调试、多波束稳定性测试。开始进行多波束水深数据采集,验潮,单波束数据采集,进行数据处理,完成编绘成图工作。整理资料,编绘成图,上交资料;
c.外业资料检查阶段:测量队质检员实施一级检查(过程检查),根据检查情况,提出整改意见;基于过程检查存在问题整改后,质量管理科质检工程师实施二级检查(最终检查),并根据检查情况,提出整改方案,最终通过质量检查并上交最终资料。
3 多波束测量的原理及应用的过程
3.1 多波束测深原理
多波束测深系统的工作原理是利用发射换能器阵列向海底发射宽扇区覆盖的声波,利用接收换能器阵列对声波进行窄波束接收,通过发射、接收扇区指向的正交性形成对海底地形的照射脚印,对这些脚印进行恰当的处理,一次探测就能给出与航向垂直的垂面内上百个甚至更多的海底被测点的水深值,从而能够精确、快速地测出沿航线一定宽度内水下目标的大小、形状和高低变化,比较可靠地描绘出海底地形的三维特征。多波束测深系统能够有效探测水下地形,得到高精度的三维地形图。
3.2 测线的布设
根据规范和技术设计书要求,为了提高扫测效率,结合本次使用多波束测深仪性能,多波束扫测时布设计划测线方向与航道方向一致,测线根据测区水深减去探头吃水的2.5倍间距布设,测线重叠率大于50%,所有测线均延长了200 m,保证罗经的稳定和数据覆盖。共计布设多波束扫测主测线里程3 000 km。测量分队在现场按照多波束性能及扫宽进行了灵活调整,以保证扫测质量和尽可能减少外业工作量。
3.3 多波束数据采集
多波束扫测时,采用DGPS定位系统定位,输送坐标给QINSy多波束外业数据采集软件,进行位置和水深及各种姿态传感器数据的采集。
多波束发射频率大部分设为400 kHz,波束开角一般设定在120°并适当调整,以保证左右两侧覆盖宽度大致各为25 m~30 m;航道边缘等陡坡、码头拐角等不便测量区域等开角设定为130°。主测线与航道走向基本一致,间距25 m~30 m,检查线垂直主测线,间距约2 000 m,港池航道边缘采用环形自由测线测量。
多波束测深系统配备安装表面声速仪,在测量时按照规范要求,分时分段采用剖面声速仪采集测区声速剖面数据。
测量完成后将多波束原始数据转换成XTF数据格式,Snippets数据存储为DB格式。
3.4 内业数据处理
多波束内业数据处理主要采用Caris公司的HIPS and SIPS软件进行,在线模式下主要是对数据采集软件采集来的各传感器数据(XTF格式)进行处理,对水深数据设定各项合理的过滤参数删除大部分的假信号。多波束数据处理流程如图1所示。

4 精度评估
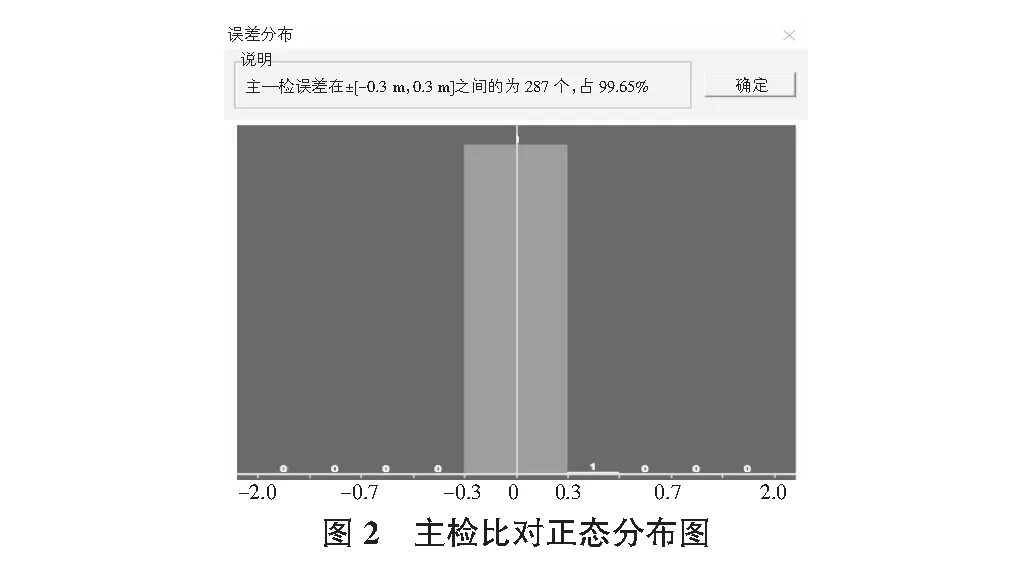
将检查线水深数据和多波束及单波束主测深线水深数据相比较,统计检查点数合计287个,主检点控制距离为1 m,平均误差0.0 m,中误差0.1 m,符合情况良好,见图2。
具体统计数据如表1所示,统计结果符合规范要求。
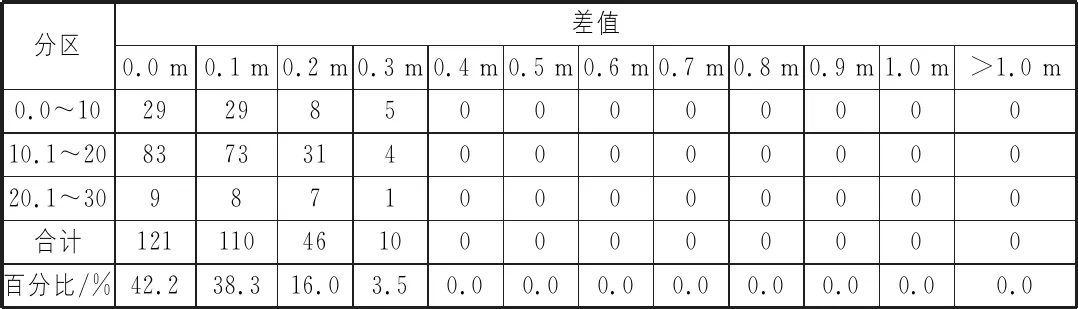
表1 统计数据
5 成图检查
本次测量成图水深与上一版海图比较,东莞玖龙码头港池、东莞东洲码头港池经过疏浚,水深普遍变深;东莞国际集装箱二期港池回淤严重,水深普遍浅2 m~3 m;沙角电厂港池水深也普遍变浅。其余区域水深与原海图比较变化不大,吻合较好。任务共设立5处验潮站,完成多波束扫海里程2 850 km,障碍物探测4处。测量各个过程严格按规范和技术设计书要求进行,水深测量完善,施测了任务书所要求的全部内容,圆满完成测量任务。
6 作业中出现的问题和处置措施
问题一:测区内过往船只、避风抛锚渔船的较多、码头作业繁忙,泊位常有船舶停靠,导致测船机动性较差,部分区域施测困难。
解决办法:1)降低测船航速,加强值班瞭望;2)对于部分定点抛锚船只采取两侧通过的方式,调整换能器波束发射角度,确保有效覆盖;3)通过现场指挥调度室,协调船只移让泊位,分区错峰实施测量。
问题二:测量期间,部分时间GPS卫星失锁,GPS无定位。
解决办法:1)将定位系统的主机重置,进行补测。2)经检查和现场实验发现,测量用GPS天线头距离测量船北斗定位系统天线较近,两套定位系统可能存在信号干扰;测量过程中将北斗定位系统关机。3)11日后GPS故障情况消失。
问题三:外业数据采集中,系统定位数据、姿态数据丢失,系统报警。
解决办法:检查发现,丢失的数据信号由一条USB转COM口数据线传送至采集笔记本电脑,相应的笔记本电脑USB口出现锈蚀松动,接触不良。对相应的笔记本接口进行除锈等处理后,问题解决。
7 结语
本文与广州港为实例采用GPS定位,多波束测深仪测深,定位、测深精度符合有关规范和技术设计书要求;采用CARIS HIPS、南方CASS软件进行内业资料处理与成图,内业资料整理及成图精度符合要求,采用中心桌面辅助检查系统进行质量检查,工程质量为优秀。本次任务对航道检测测量的过程方法以及注意事项进行实践分析,同时对相关问题提出合理的建议,对航道检测测量有很好的借鉴意义。
