高超声速飞行器跳跃滑翔趋势分析
2020-01-03孟繁卿田康生韩春耀许道明路琪
孟繁卿,田康生,韩春耀,许道明,路琪
(1.空军预警学院a.研究生大队;b.四系;c.雷达士官学校,湖北 武汉 430019;2.中国人民解放军95806部队,北京 100076)
0 引言
高超声速飞行器作为一种新型武器运载平台,不仅具备投送距离远、飞行高度低的特点,而且飞行速度快、弹道轨迹灵活多变。目前尚没有证据表明现有的导弹防御系统,能够实现对高超声速飞行器的有效拦截。因此,高超声速飞行器被视为改变战争规则的杀手锏武器[1]。高超声速滑翔飞行器作为高超声速飞行器的一种,通过火箭助推或天基平台释放,飞行器到达一定高度后进入滑翔状态。其在滑翔段借助空气动力实现滑翔飞行,飞行Ma数大于5 ,飞行高度大于20 km。飞行器滑翔段的弹道形式,可分为平衡滑翔和跳跃滑翔[2-3]。其中飞行器采用平衡滑翔弹道飞行时,其弹道轨迹平滑,通常没有机动变轨。飞行器采用跳跃滑翔弹道飞行时,其弹道轨迹不固定,可多次机动变轨,大大增强了其突防能力。因此,当前高超声速滑翔飞行器主要采用跳跃滑翔弹道进行飞行。
因为高超声速飞行器采用跳跃滑翔弹道滑翔时,很难准确推算飞行器的发点和落点,即对飞行器弹道轨迹预测的难度较大。虽然无法准确预测高超声速跳跃滑翔飞行器的弹道轨迹,但是如果能够判断飞行器的运动趋势,同样可以达到对高超声速飞行器及时预警、延长预警时间的目的。文献[4]指出高超声速滑翔飞行器目标跟踪的偏差主要来源于目标运动模型的不匹配,通过放大预测协方差的方式有效解决了模型失配造成的滤波发散问题。文献[5]指出轨迹预测的关键问题之一是获得飞行器状态变量的变化规律,并利用最小二乘拟合设计了一种轨迹预测方法,仿真结果表明所设计的预测方法效果良好。文献[6]利用改进集成经验模态分解方法,将跳跃滑翔的运动轨迹序列分解为趋势项、周期项和随机项,分别对3个子项进行轨迹预测后,再集成作为弹道轨迹的预测结果,所提算法提高了轨迹预测精度。文献[7]利用参数辨识方法,对典型控制规律条件下的高超声速滑翔飞行器的攻角和倾侧角进行辨识。在倾侧角不发生翻转时,所提方法对飞行器运动轨迹的预测效果较好。文献[8]指出可以通过预测升阻比的变化规律,对高超声速再入滑翔飞行的轨迹进行预测。利用最小二乘法对飞行器的升阻比进行拟合,进而实现了对飞行器轨迹的预测。文献[9]结合高超声速滑翔弹的作战意图和防御方的先验信息,利用蒙特卡罗采样和贝叶斯理论,对高超声速滑翔弹的运动轨迹进行预测,所提算法预测精度较高。文献[10]结合高超声速飞行器的运动特性,利用动态贝叶斯方法,通过分析高超声速飞行器与被保卫目标之间的关系,推断飞行器的攻击意图,文献研究内容具有较高的军事应用价值。
通过对以上文献的分析可知,虽然应用背景和目的不同,但对飞行器状态的变化规律,即飞行器运动规律或运动趋势的分析都至关重要[11]。已有文献不管是通过拟合升阻比,还是对控制参数进行辨识,均需要飞行器的控制规律等先验信息。所以,在不掌握飞行器控制规律等先验信息的情况下,如何判断高超声速滑翔飞行器的运动趋势将是研究的重点和难点。其中文献[6]指出高超声速滑翔飞行器运动轨迹存在趋势项,如果可以求解高超声速滑翔飞行器的运动趋势,将为明晰高超声速目标的作战意图提供有力支撑。为此,本文对高超声速滑翔飞行器在纵向跳跃滑翔情况下,飞行器状态变量的运动趋势进行了求解分析,以期为目标跟踪模型构建、弹道轨迹预测、飞行器作战意图分析等提供参考。
1 高超声速滑翔飞行器运动模型
为构建高超声速滑翔飞行器运动模型,如图1所示,分别建立地面坐标系Sg(Oxgygzg)和速度坐标系Sv(Oxvyvzv)。其中,坐标原点O是飞行器初始位置在地面的投影点,Oxg轴指向水平面内任一方向,Ozg轴铅锤向下,Oyg轴的指向与Oxg,Ozg轴的指向符合右手定则;Oxv轴指向与飞行器速度v的方向保持一致,Ozv轴在飞行器对称平面内与Oxv垂直向下,Oyv轴的指向与Oxv,Ozv轴的指向符合右手定则。v′为飞行速度v在Oxgyg平面内的投影,速度倾角γ为飞行速度与Oxgyg平面的夹角。
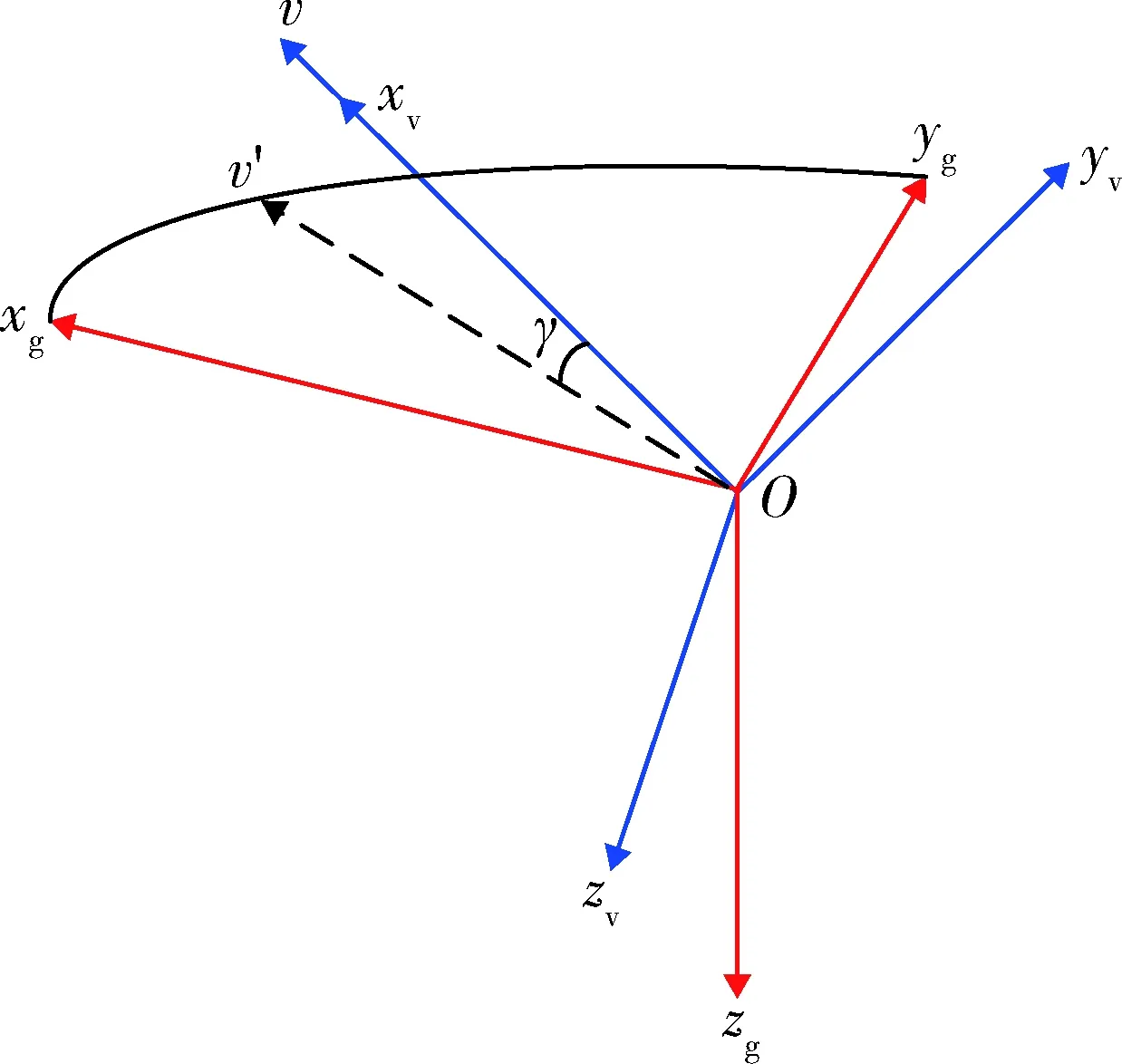
图1 地面坐标系和速度坐标系
根据高超声速滑翔飞行器在滑翔段的受力情况,建立其运动方程[6,11],如式(1)所示。
(1)
式中:v为飞行速度;γ为速度倾角;(x,z)为飞行器的位置坐标;m为飞行器质量;g0为重力加速度常数;L为飞行器所受升力;D为飞行器所受阻力。其中,升力、阻力的计算可由式(2)求得[12]
(2)
式中:S为飞行器的参考面积;CL为飞行器的升力系数;CD为飞行器的阻力系数。
2 飞行器状态变量数值解

(3)
式中:ti=t0+iΔt,i=0,1,2,,…;Δt为迭代时间步长。
3 飞行器状态变量解析解
为了求解表征飞行器状态变量变化趋势的解析解,通过龙格-库塔求得状态变量的数值解后,利用正交多项式拟合状态变量的数值解[14]。分别采用1,2,3阶正交多项式拟合状态变量的数值解,拟合函数分别如式(4)~(6)所示。
γ(t)=d0P0(t)+d1P1(t),
(4)
γ(t)=d0P0(t)+d1P1(t)+d2P2(t),
(5)
γ(t)=d0P0(t)+d1P1(t)+d2P2(t)+d3P3(t),
(6)
式中:P0(t),P1(t),P2(t),P3(t)为拟合函数的基函数,其中Pj(t)(j=0,1,2,3)是关于t的j次正交多项式。
(7)
(8)
4 仿真校验及分析
4.1 仿真设置
跳跃滑翔弹道不满足平衡滑翔条件,无法通过理论推导得出飞行速度、速度倾角、纵程、高度的解析式。文献[6]指出跳跃滑翔存在明显的趋势项,趋势项是跳跃滑翔的主要分量。曲线拟合是分析数据点变化趋势的重要方法[15]。由文献[6]的结论可知,利用曲线拟合可求解表征跳跃滑翔各状态变量变化趋势的解析解。
以洛克希德·马丁公司研发的高超声速通用气动飞行器CAV-H(common aero vehicle)为例[16]。采用数值仿真的方法生成跳跃滑翔弹道,利用不同阶次的正交多项式拟合飞行速度、速度倾角、纵程和高度。取目标点位置(4 000×103,-100),随机生成10个跳跃滑翔弹道,其初始状态如表1所示。图2所示,为10个跳跃滑翔弹道轨迹图。
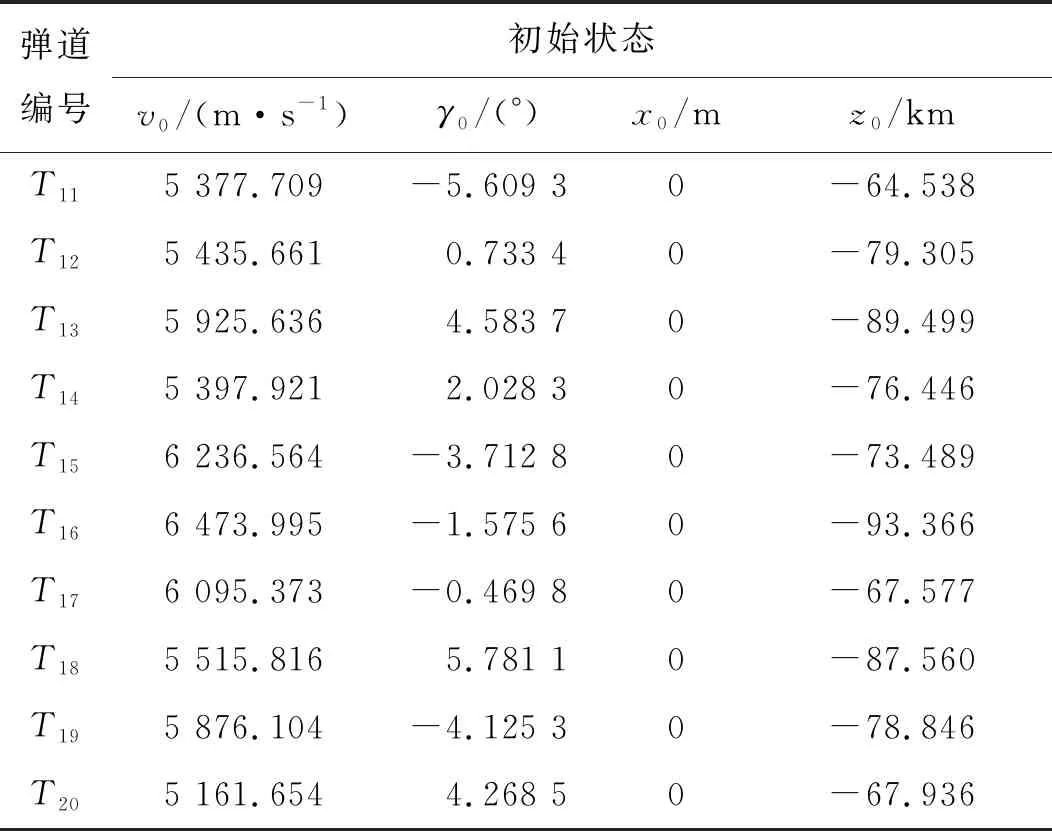
表1 跳跃滑翔弹道的滑翔段初始状态
4.2 飞行速度分析
图3所示,为10个跳跃滑翔弹道飞行速度解析解的平均均方根误差(root mean square error,RMSE)。从图3中可以看出,一阶解析解的RMSE大于二阶解析解和三阶解析解的RMSE,但3个阶次解析解的RMSE相差在20 m/s之内。表2为各跳跃滑翔弹道飞行速度不同阶次解析解的最大RMSE和最小RMSE。由表2可知,10个跳跃滑翔弹道飞行速度一阶解析解的最大RMSE均值较大,同时一阶解析解的最小RMSE均值与二阶解析解、三阶解析解的最小RMSE均值相差不超过2 m/s,且一阶解析解的最小RMSE均值要小于二阶和三阶解析解的最小RMSE均值。

图2 跳跃滑翔弹道轨迹
限于篇幅,在此以弹道T11为例,图4所示为弹道T11的飞行速度数值解与解析解,图5为不同阶次解析解的RMSE。由图4可知,飞行速度的3个不同阶次的解析解均能很好地拟合飞行速度的数值解。由图5可知,飞行速度一阶解析解的RMSE大
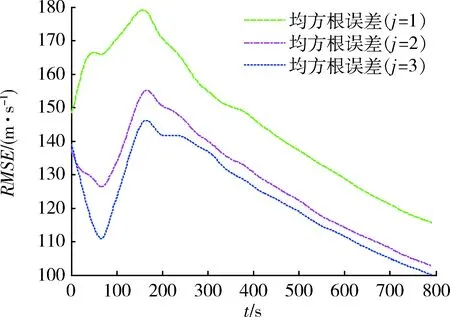
图3 跳跃滑翔飞行速度的RMSE均值
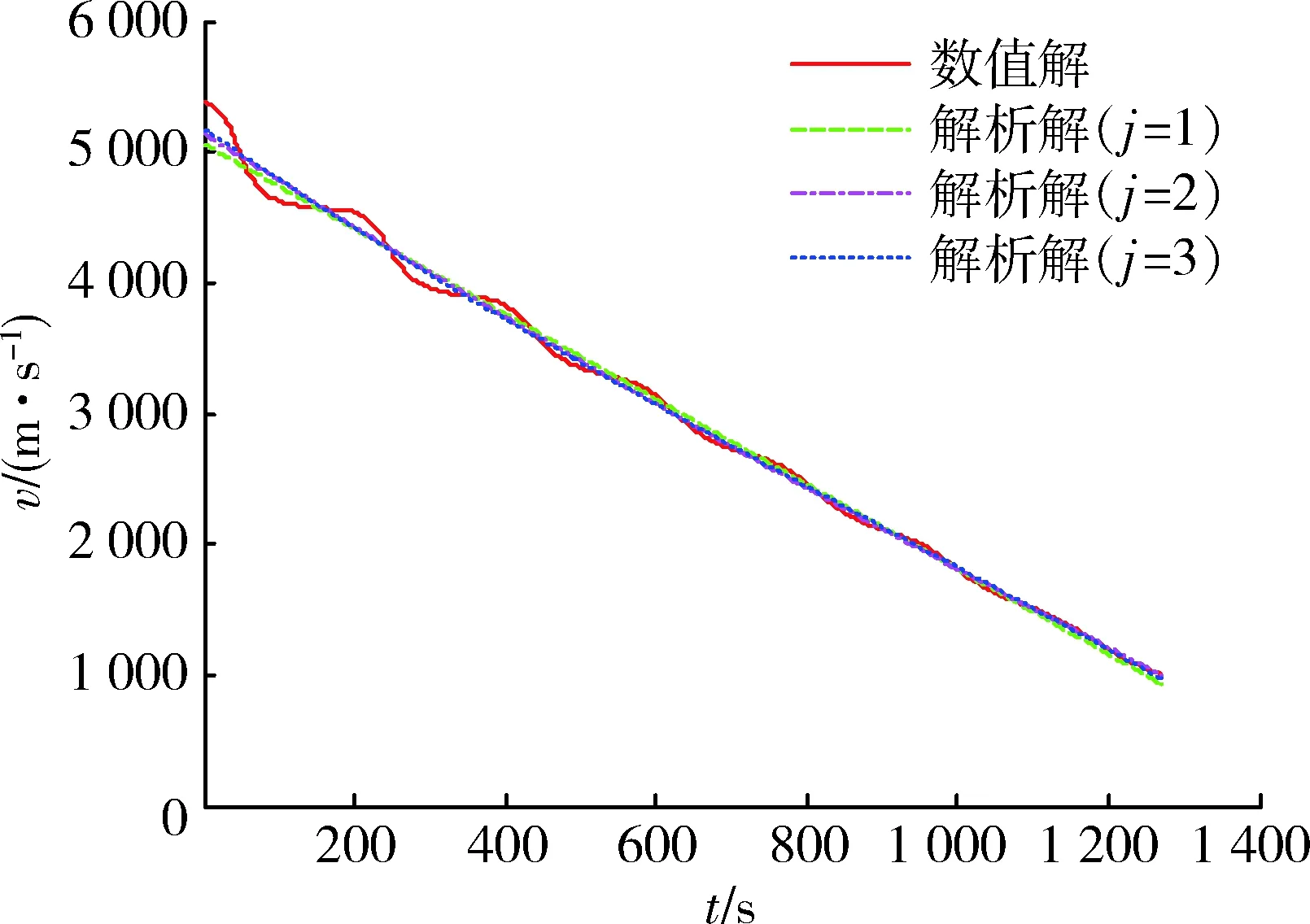
图4 弹道T11飞行速度数值解与解析解

图5 弹道T11飞行速度解析解的RMSE
于二阶解析解和三阶解析解的RMSE,但3个不同阶次解析解的RMSE相差在10 m/s左右,相对飞行器的高超声速而言可忽略不计,且一阶解析解的运算量更低。由以上分析可知,跳跃滑翔飞行速度的变化趋势可用一阶正交多项式表示,飞行速度-时间近似满足线性关系。
4.3 速度倾角分析
图6所示,为10个跳跃滑翔弹道速度倾角解析解的平均RMSE。从图6中可以看出,一阶解析解的RMSE大于二阶解析解和三阶解析解的RMSE。在滑翔中后段,一阶解析解的RMSE与二阶和三阶解析解的RMSE相差在0.1°左右。表3为各跳跃滑翔弹道速度倾角不同阶次解析解的最大和最小RMSE。由表3可知,10个跳跃滑翔弹道速度倾角3个不同阶次解析解的最大RMSE均值相差在0.3°,最小RMSE均值相差小于0.1°。

图6 跳跃滑翔速度倾角的RMSE均值
图7所示为弹道T11的速度倾角数值解与解析解,图8为不同阶次解析解的RMSE。由图7可知,速度倾角呈现震荡下降的趋势,3个不同阶次的解析解均能表征这一趋势。由图8可知,速度倾角3个不同阶次解析解的RMSE曲线基本重合,但一阶解析解的运算量更低。由以上分析可知,跳跃滑翔弹道速度倾角的变化趋势可用一阶正交多项式表示,一阶解析解能够表征速度倾角震荡下降的变化趋势。
4.4 飞行纵程分析
图9所示,为10个跳跃滑翔弹道飞行纵程解析解的平均RMSE。从图9中可以看出,一阶解析解的RMSE比二阶和三阶解析解的RMSE大2个数量级。
表4为各跳跃滑翔弹道飞行纵程不同阶次解析解的最大RMSE和最小RMSE。由表4可知,10个跳跃滑翔弹道飞行纵程一阶解析解的最小RMSE均值大于100 km。二阶和三阶解析解的最大RMSE不超过15 km,最小RMSE小于5 km。
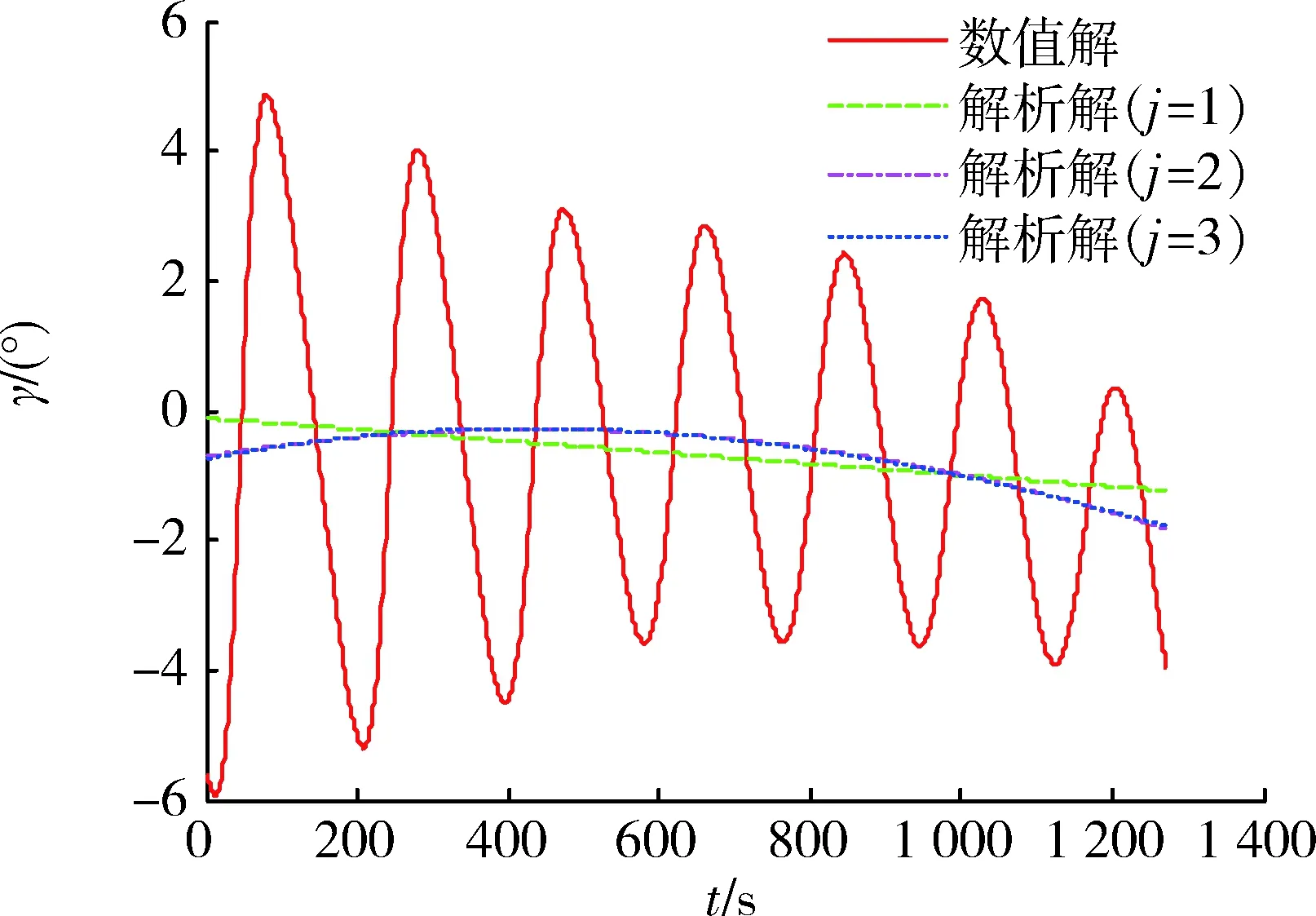
图7 弹道T11速度倾角数值解与解析解
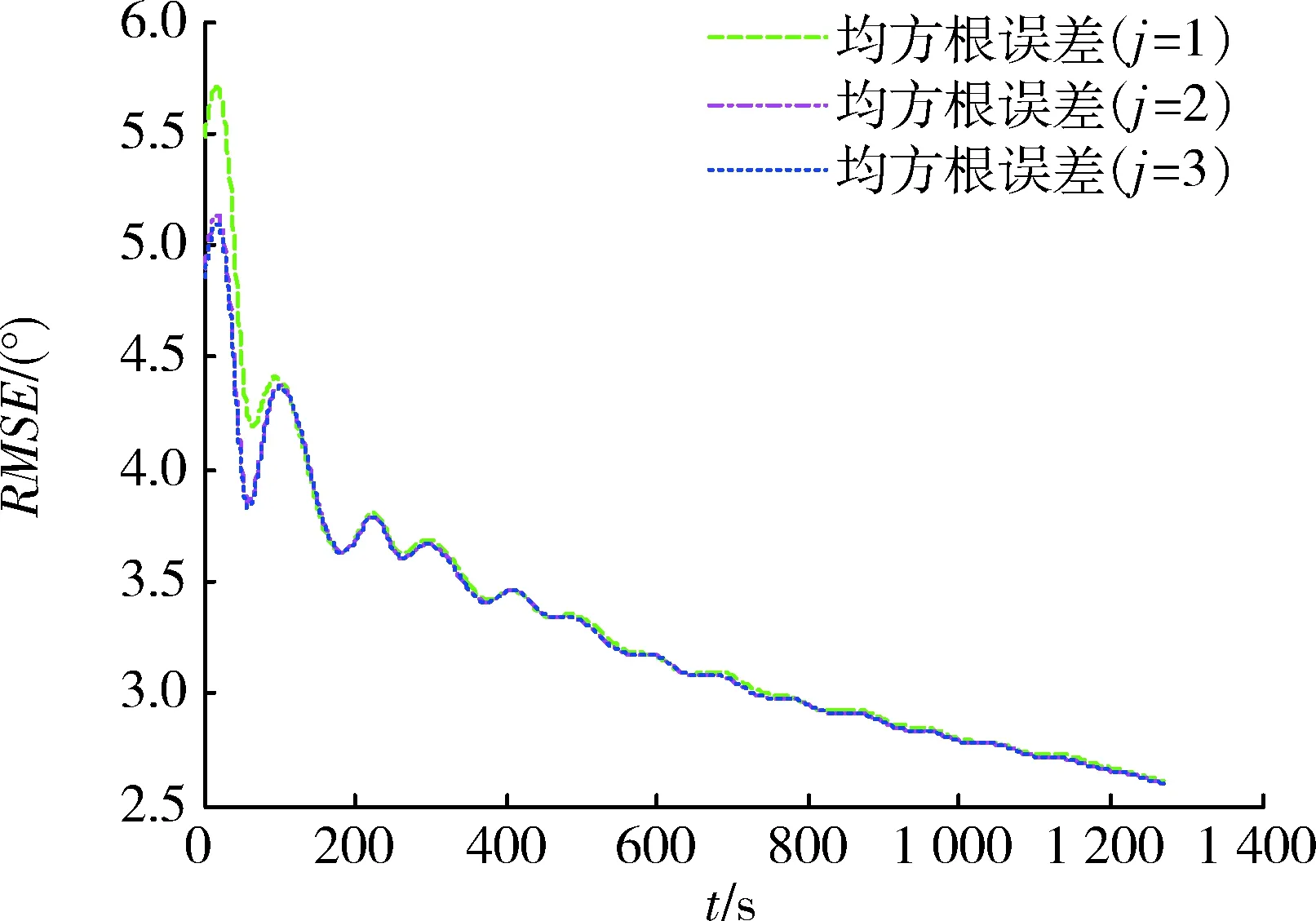
图8 弹道T11速度倾角解析解的RMSE
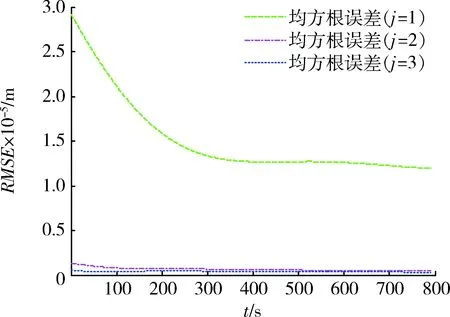
图9 跳跃滑翔飞行纵程的RMSE均值
图10所示为弹道T11的飞行纵程数值解与解析解,图11为不同阶次解析解的RMSE。由图10可知,飞行纵程呈现明显的非线性特征,用一阶解析解拟合飞行纵程存在明显误差,二阶解析解和三阶解析解基本与数值解重合。由图11可知,一阶解析解的RMSE比二阶和三阶解析解的RMSE大2个数量级,二阶和三阶解析解的最小RMSE均小于3 km。由以上分析可知,飞行纵程的变化趋势可用二阶或三阶解析解表示。
4.5 飞行高度分析
图12所示,为10个跳跃滑翔弹道飞行高度解析解的平均RMSE。从图12中可以看出,3个阶次解析解的RMSE均值在滑翔中后段相差小于1 km。

表3 跳跃滑翔速度倾角曲线拟合RMSE
图11 弹道T11飞行纵程解析解的RMSE
图12 跳跃滑翔飞行高度的RMSE均值
表5为各跳跃滑翔弹道飞行高度不同阶次解析解的最大RMSE和最小RMSE。由表5可知,10个跳跃滑翔弹道飞行高度3个阶次解析解的最大RMSE均值小于14 km,最小RMSE均值小于6 km。图13所示为弹道T11的飞行高度数值解与解析解,图14为不同阶次解析解的RMSE。由图13可知,飞行高度呈现震荡下降的趋势,3个阶次的解析解基本重合。由图14可知,3个阶次解析解的RMSE曲线基本重合,说明二阶解析解和三阶解析解对飞行高度的拟合精度并没有显著提高。由以上分析可知,跳跃滑翔弹道的飞行高度-时间近似呈现线性关系,可以用一阶解析解表示飞行高度的变化趋势。
表4 跳跃滑翔飞行纵程曲线拟合RMSE
表5 跳跃滑翔飞行高度曲线拟合RMSE

图13 弹道T11飞行高度数值解与解析解
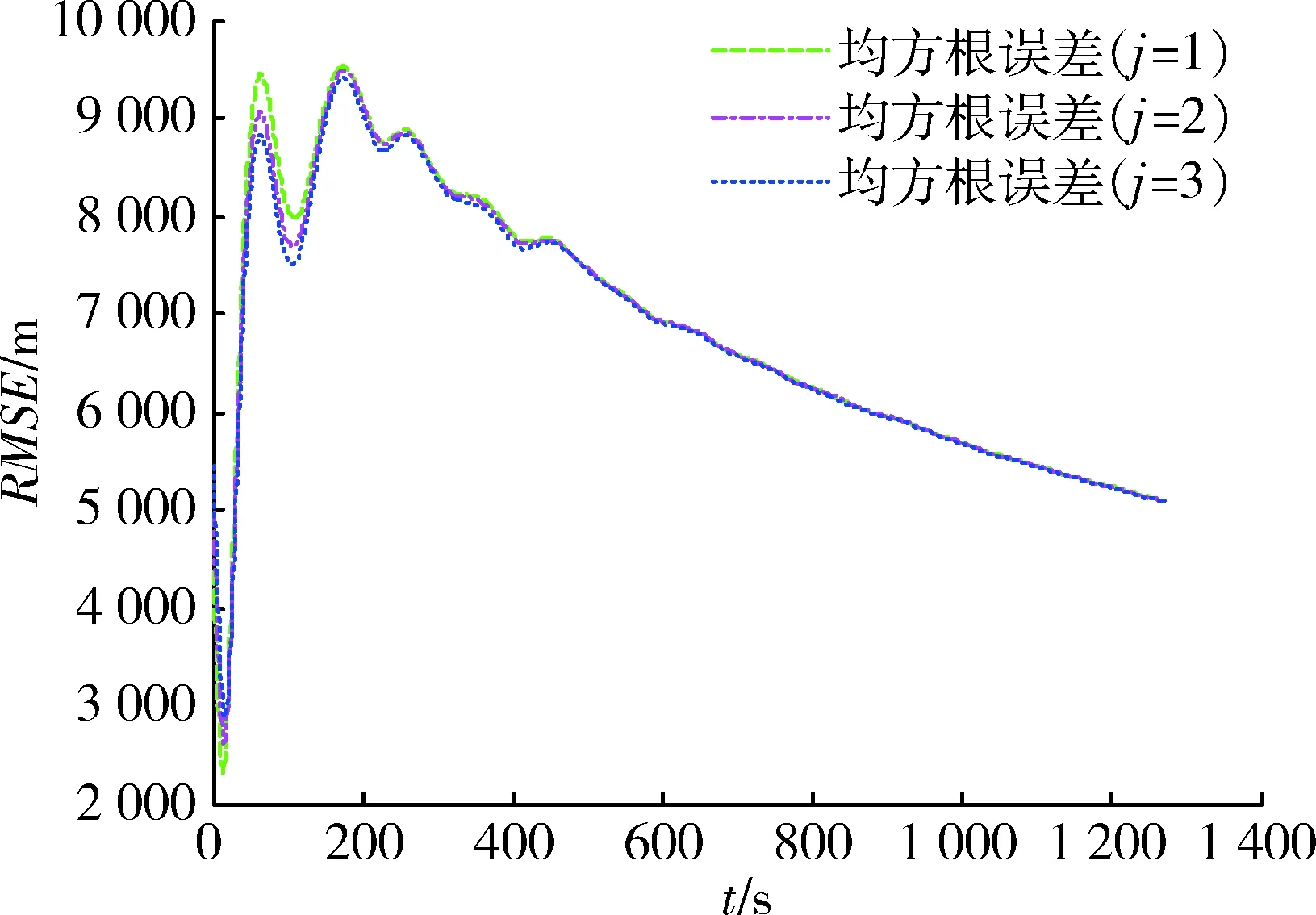
图14 弹道T11飞行高度解析解的RMSE
5 结束语
针对高超声速跳跃滑翔飞行器在滑翔段运动趋势的求解问题,在跳跃滑翔条件下通过曲线拟合得到的状态变量趋势项解析解,可用于预测状态变量的变化趋势。由仿真结果,可得到如下结论:
跳跃滑翔条件下,飞行速度3个阶次解析解的RMSE均值相差在20 m/s左右,速度倾角3个阶次解析解的RMSE均值相差在0.1°左右,飞行高度3个阶次解析解的RMSE均值相差小于1.5 km,所以跳跃滑翔的飞行速度、速度倾角、飞行高度随时间的变化趋势可用一阶正交多项式表示。飞行纵程一阶解析解的RMSE比二阶解析解和三阶解析解的RMSE大2个数量级,所以跳跃滑翔条件下的飞行纵程-时间呈现明显的非线性变化趋势,可用二阶或三阶正交多项式表示。