基于SolidWorks的手持式花椒采摘器结构设计及运动仿真
2020-01-02黎书文杨海诚陆玉雪
黎书文,杨海诚,陆玉雪
(贵州理工学院 机械工程学院,贵州 贵阳 550003)
0 引言
花椒主要种植在丘陵、山坡、岸边和地头,花椒产业已成为特殊区域农民致富新的经济增长点[1]。然而花椒采收对农艺要求较高,既不能伤叶、伤芽、伤枝,又要适时收获。因其树枝伸展长、带刺且果实小从而致使采摘十分困难。李斌常等研制了一种简单的类似加长剪刀一样的工具来采摘高枝处的花椒[2];田文君等人研发了一种多功能摘花椒机,通过电动剪刀的方式实现花椒采摘[3]。虽然这些机械在一定程度上保护了手臂不被划伤,但其效率仍然较低,而且容易伤及花椒树本身,造成来年花椒减产甚至花椒树枝的死亡,再加上没有自带收集装置,使得花椒收集有一定的难度。
本文根据花椒果实的特性,设计了一种新型的电动手持式花椒采摘器,通过对整机的采摘装置、传动装置以及收集装置等结构进行设计,为花椒机械化收获提供有益参考。
1 总体设计方案
1.1 设计流程
为了最大限度保证工作质量,提高采收效率,根据已知条件进行参数化设计,优化设计结构;运用SolidWorks中的motion分析功能,模拟其工作原理与过程[4]。总体设计流程如图1所示。

图1 设计流程图
主要研究内容包括:
1)花椒采摘器的总体结构设计;
2) 关键零部件参数化设计及结构优化;
3) 模拟采摘器工作原理及工作过程。
1.2 设计方案
本文设计的花椒采摘器主要由喂入口、滚筒、机架、电动机、蜗轮、蜗杆、手柄、刀片、收集盒及其他零部件组成,整体结构如图2所示。

1.机架;2.蜗杆;3.滑动锯齿形刀片;4.固定锯齿形刀片;5.蜗轮 6.滚筒;7.轴承座;8.上壳体;9.万向节;10.传动轴;11.万向节;12.电机架;13.电机;14.电机架固定板;15.开关;16.手柄;17.销轴;18.收集盒图2 花椒采摘器结构示意图
2 采摘原理分析
该花椒采摘器通过喂入口对花椒枝条进行限位,然后通过滚筒梳刷的作用实现花椒收获。具体工作原理如下:电动机输出动力,通过万向节9传递给传动轴,经万向节11传递给Ⅰ轴,Ⅰ轴通过蜗轮蜗杆将动力传递给Ⅱ轴,Ⅱ轴上固定有滚筒,滚筒将喂入采摘器的花椒拨向下方的交错滑动的锯齿状刀片切割区域;刀片3固定在机架上,刀片4可沿刀片3水平滑动,刀片3和刀片4交错滑动剪切滚筒梳刷拨下的花椒果实,被剪断的花椒经手柄前端的物料筒落入下方的收集盒内。当采集的花椒装满后,可通过卸载收集盒继续采收,从而实现不间断作业,提高采收效率[5]。
3 整机结构设计
本装置选用SolidWorks三维绘图软件进行产品三维建模,为实现良好的可装配性和理想的模型效果,建模过程中尽可能简化建模步骤。该电动手持式花椒采摘器主要由上、中、下三部分组成。上端为该产品功能执行部件,亦是本设计的重点内容,中间为采摘器的手持结构部分,下端为采摘器的收集装置[6]。
3.1 采摘头设计
采摘头即为本装置的执行部分,由机架、固定锯齿形刀片、滑动锯齿形刀片、轴承座、滚筒、蜗轮、蜗杆、阶梯轴Ⅰ、阶梯轴Ⅱ、轴承、万向节、传动轴等组成。采摘头安装在机体前端靠近喂入口部位,通过自攻螺钉连接固定。
3.2 手柄设计
手柄由前后薄壁外壳和开关构成,前后薄壁面使用自攻螺钉连接,在手柄的食指位置装有电源开关;其下方设有一通孔,安装收集盒时插入销轴,另一端插入开口销以固定收集盒。
3.3 收集盒设计
收集盒是一个上方收口的桶状复合曲面外壳,安装在手柄下方。
3.4 其他零件设计
这类零件主要由十字沉头螺栓、十字沉头自攻螺钉、螺母、平垫圈、销轴、开口销等组成,这类零件属于标准件,只需合理选型即可。
4 样机虚拟装配
完成上述各零部件的实体建模后,运用SolidWorks的装配仿真功能中提供的约束关系实现产品的虚拟装配,以便后期进行干涉检查、动态模拟、装配流程以及运动仿真等一系列辅助设计。
装配所需要的零部件有机架、固定锯齿形刀片、滑动锯齿形刀片、轴承座、滚筒、蜗轮、蜗杆、阶梯轴Ⅰ、阶梯轴Ⅱ、轴承、万向节、传动轴、安装板、采摘头、手柄、开关、收集盒、十字沉头螺栓4件、十字沉头自攻螺钉8件、螺母4件、平垫圈4件、销轴1件、开口销1件等。
装配方案顺序依次为:1)装配执行部件;2)装配动力驱动部件;3)装配采摘头;4)装配手柄;5)装配收集盒;6)总装花椒采摘器。
具体装配过程如下:
1)装配执行部件:机架、固定锯齿形刀片、滑动锯齿形刀片、轴承座、滚筒、蜗轮、蜗杆、阶梯轴Ⅰ、阶梯轴Ⅱ、轴承、万向节1的组装,如图3所示。

图3 执行部件组装图
2)装配动力驱动部件:万向轴2、电机、电机架、用于连接和定位电机架的安装板的组装,如图4所示。

图4 动力驱动部件组装图
3)装配采摘头:前后薄壁外壳、执行部件、动力驱动部件的组装,如图5所示。

图5 采摘头组装图
4)装配手柄:前后薄壁曲面外壳、开关的组装,如图6所示。

图6 手柄模型图
5)装配收集盒:收集盒、销轴、开口销的组装,如图7所示。

图7 收集盒模型图
6)总装花椒采摘器,如图8所示。
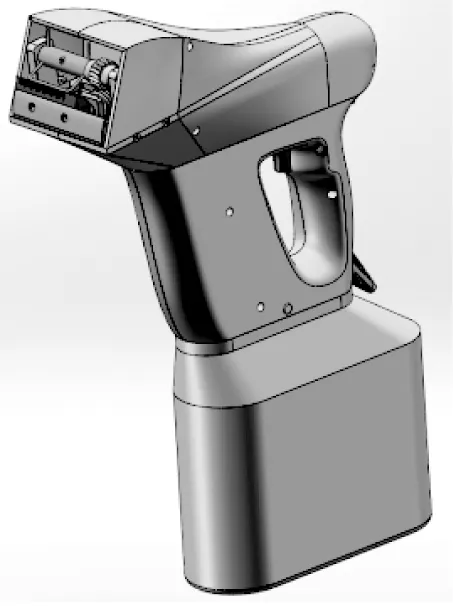
图8 采摘器总装配图
5 运动仿真分析
SolidWorks/Motion是基于Windows环境的参数化三维实体造型软件,可以对装配体进行精确模拟和运动单元分析,Motion分析使用计算能力强大的动力学求解器,在计算中考虑到了材料属性和质量及惯性,能够完成如力、弹簧、阻尼和摩擦等方面的计算,同时还能绘制相关曲线供进一步分析。
5.1 采摘器结构分解
生成爆炸图,如图9所示。
5.2 工作过程模拟
花椒采摘器的工作过程模拟情况如图10所示。
6 结语
本文基于实施乡村振兴战略和助力打赢脱贫攻坚的背景,结合花椒采摘特点,设计了一种电动手持式花椒采摘装置,有效地节省了人力和时间成本,提高了采摘效率,实现了机械化采摘,后期将继续对实体样机进行调试以达到最佳效果。

图9 装配体爆炸图
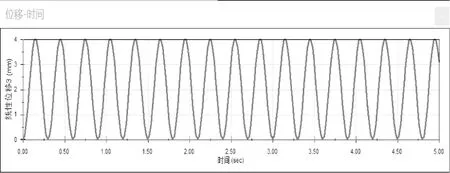
(a)滑动刀片位移图解
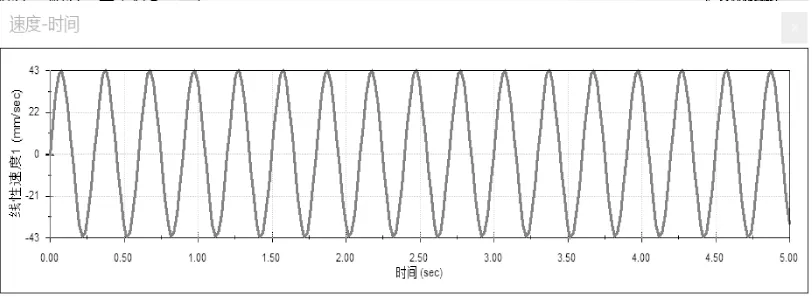
(b)滑动刀片速度图解

(c)驱动电机角速度图解

(d)滚筒角速度图解图10 花椒采摘机工作过程模拟图
