中医推拿机器人设计与研究
2019-12-31陈俊王殊轶汪鹏龚利
.陈俊,王殊轶,汪鹏,龚利
1.上海理工大学 医疗器械与食品学院(上海,200093) 2.上海中医药大学附属岳阳中西医结合医院 推拿科 (上海,200041)
0 引言
膝关节骨性关节炎(Knee Osteoarthritis,KOA)是指膝关节中的软骨发生组织破坏,软骨中的骨质发生增生,软骨出现剥落,关节出现损坏畸形等现象,最终导致膝关节功能发生活动障碍的一种退行性疾病[1]。随着中国步入老龄化社会,由KOA引起的慢性关节疼痛、肿胀、关节活动范围受限等症状严重影响老年人的晚年生活质量,因此关于KOA的治疗手段也越来越受到国人的关注。中医推拿作为一种安全、无创、无痛的治疗方法已被证明对于辅助治疗KOA具有良好的临床效果[2-3],因此深受广大KOA患者的喜爱。然而目前国内中医推拿的现状是专业治疗师资源紧缺,患者基数大,一号难求的情况屡见不鲜。并且中医推拿属于重体力劳动,目前各大医院的专业治疗师长期处于高负荷劳动状态,容易造成职业损伤,缩短其职业寿命,如此恶性循环最终加剧治疗资源紧缺的情况。利用仿生按摩机器人代替专业推拿医师为患者施加按摩将能很好地解决上述问题,因此近年来中医推拿仿生机器人已经成为国内外机器人领域研究的一个热点,相关成果也层出不穷。Minyong等[4]提出一种多手指机器人按摩运动控制系统,该系统由多指机器人的位置控制和力控制单元组成,控制手指机器人的运动轨迹变化、角度变化和施加压力。Alavandar等[5]设计了一种用于腿部按摩的新型机器人,其实现原理是通过摄像机标定和遗传算法。高焕兵等[6]依据中老年人慢性疾病和退行性疾病对医疗保健康复设备的临床需求,提出了一种中医按摩机器人系统。
尽管仿生按摩机器人的成果众多,但是针对膝关节的按摩设备并不多见,且现有的膝关节理疗设备的生物力学特性也并不能满足治疗KOA的临床需求,无法代替专业推拿医师为患者施加治疗。本文基于一种专门用于治疗KOA的推拿手法——坐位调膝法的生物力学特性设计了一款针对治疗KOA的仿生按摩机器人,验证传统中医推拿治疗KOA机器人疗法的可行性。意在将专业推拿医师从长时间高负荷的体力劳动中解放出来,使其将更多的精力投入到推拿手法的创新和优化上,促进传统中医推拿技术的传承和进步。
1 仿生按摩机器人设计
1.1 手法生物力学特性
坐位调膝法是一种用于治疗KOA的中医推拿手法,由岳阳医院龚利医生发明,施展坐位调膝法时,治疗医师使用双手拇指按一定频率和力度挤压患者的内外膝眼,治疗过程中患者配合治疗医师的动作在坐姿和站姿之间来回切换,最终达到治疗KOA的目的[7-8]。根据王鹏等[9]对该手法生物力学特性的研究,该手法要求的指尖推拿力度达到220 N。主要自由度有手臂前后平移自由度和手臂上下平移自由度。
1.2 总体结构设计
仿生按摩机器人的整体结构如图1所示,由底座、支撑架、凸轮机构以及伺服电机组成。其中支撑架可以上下调节并且起到支撑固定杆子以及伺服电机的功能。伺服电机选用安川的SGM7A-04A系列中的SGM7A-04A-ABH伺服电机,该电机自带减速机且可以通过编程直接控制,因此不必外接减速机,直接将凸轮安装在伺服电机的输出轴上,从而简化整体结构,凸轮的运动规律直接由伺服电机控制。L型足部固定件及所有支撑架均安装在底座上。为使仿生按摩机器人的性能达到最优,在设计过程中还遵循了以下原则:(1)仿生按摩机器人的按摩机构尽可能地模仿治疗医师的拇指形状,使该按摩机器人满足仿生学和人体工程学的要求。(2)为了提高系统的鲁棒性和降低系统成本,尽可能地减少了按摩机器人的驱动元件,仅使用了安川的SGM7A-04A系列伺服电机作为主驱动。(3)按摩机器人具有身材兼容性,各主要机构可以根据患者的身材在一定范围内进行调节。(4)按摩装置具备坚固、耐用、轻巧等特性。其结构的刚度不但能够承受其自重,还能承受推拿过程中来自患者的冲击力。

图1 仿生按摩装置整体结构图
1.3 身材兼容性设计
为了进行身材兼容性设计,首先需要了解中国人群的坐姿膝高范围(指髌骨上方的大腿表面至地面的垂直距离)通过查阅相关资料[10],中国南部人群的坐姿膝高范围为(46~50.5)cm,从而确定支撑架的调节范围。
由于每个患者内外膝眼的间距也各不相同,所以仿生按摩机器人的末端执行器也应具有尺寸调节功能。如图2,按摩机构的头部采取弧形设计,以期尽可能地模仿治疗医师的拇指,同时采用四连杆机构实现两个按摩头部间距的调节,前后移动滑槽内的滑块,两个按摩头部在连杆的带动下将实现一张一合的运动。
1.4 足部固定及起身辅助机构设计
坐位调膝法与其它中医推拿手法最不同的地方在于在整个推拿按摩的过程中患者必须配合治疗医师的按压在坐姿与站姿之间来回切换。实际治疗过程中,患者坐在普通的椅子上接受治疗,由于每个患者腿部力量不同以及治疗医师手法力量不同,在治疗过程中病人腿部常会出现由于按压力度大导致的移动现象,这会影响治疗效果。同时根据朱正飞等[11]的前期研究,KOA患者在从坐姿切换到站姿的过程中会出现不同程度的障碍。所以该仿生按摩机器人应该具有足部固定及起身辅助的功能。
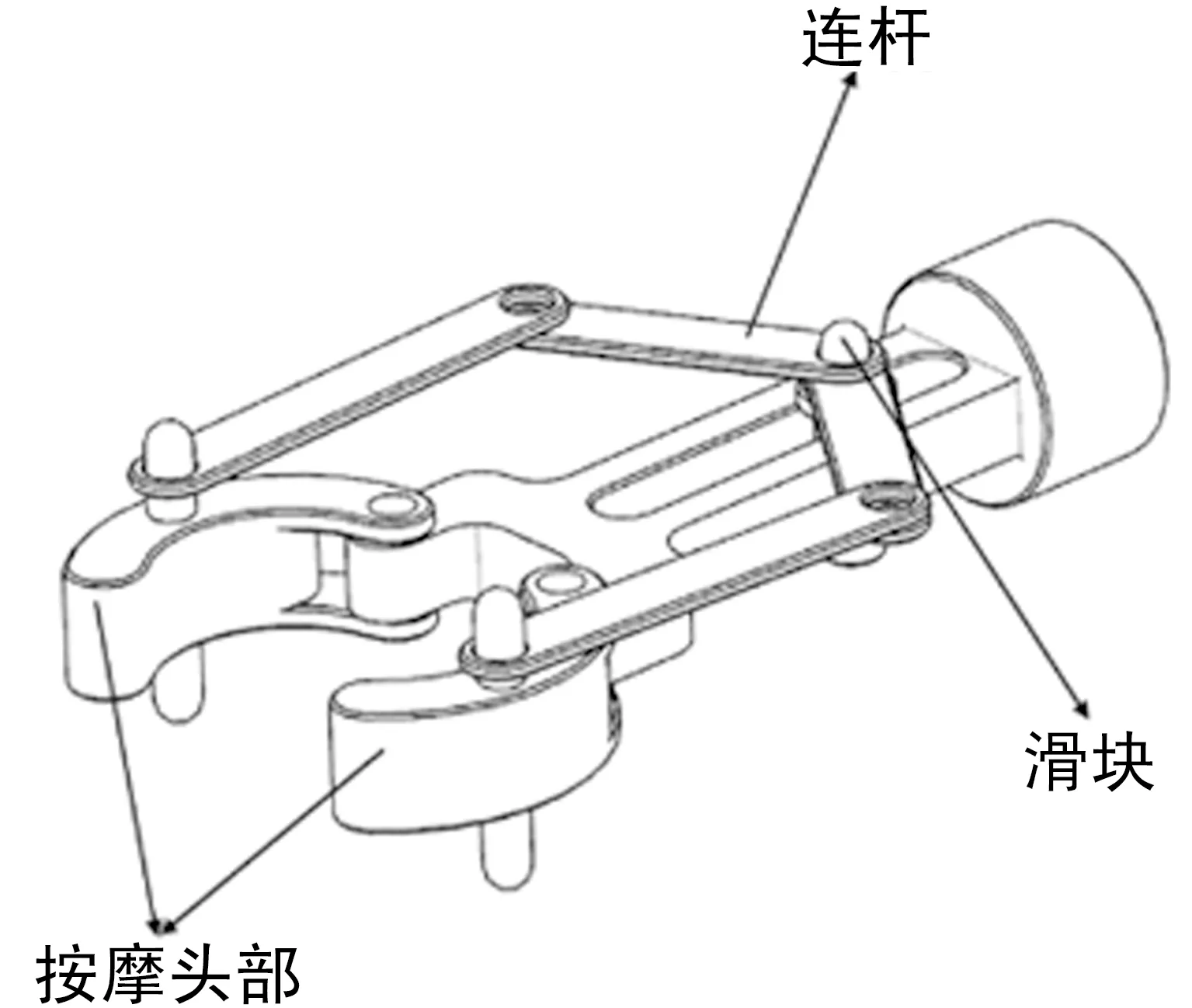
图2 仿生按摩装置末端执行器
该仿生按摩机器人的足部固定件呈现L形。当患者足部固定妥当后,先让患者坐下。治疗医师将大腿绑带两侧的弹力绳分别系在辅助起身杆上,并将弹力绳固定在辅助起身杆上的凹槽中。这样在治疗过程中,患者起身时,弹力绳对患者腿部有个向前的拉力,从而起到辅助患者起身的作用。
1.5 传动机构设计
该仿生按摩机器人利用凸轮机构来模拟医生手臂前后平移自由度。凸轮机构主要由凸轮、从动件和机架三种基本零件组成。本研究结合实际设计需求从动件滚子半径选择r=10 mm。本研究设计的凸轮机构运动规律有推程、停止、回程三个阶段,推程为20 mm,推程运动角Φ为120°,远休止角Φs为120°,回程运动角Φ’为120°,且每个阶段的时间为5 s。由于本研究符合低速轻载场合,所以从动件运动规律采用等加速等减速。综上,该仿生按摩机器人的凸轮和从动件应满足图3的运动规律。
1.6 凸轮仿真分析
采用SolidWorks中的Motion插件对设计的凸轮进行仿真分析,分析其位移、速度、加速度是否符合设计要求。本研究主要对凸轮进行了位移、速度、加速度的仿真,其仿真结果分别如图4所示。

图3 凸轮预期运动规律
根据仿真结果可知:(1)线性位移:在0~5 s时间段,线性位移从0 mm变化到20 mm;在5~10 s时间段,线性位移保持20 mm不变;在10 s~15 s时间段,线性位移从20 mm变化到0 mm。整个运动位移与预期设计的要求相符。(2)速度:在0~2.5 s时间段,速度从0 mm/s均匀变化到7 mm/s;在2.5~5 s时间段,速度从7 mm/s均匀变化到0 mm/s;在5~10 s时间段,速度一直保持0 mm/s;在10~15 s时间段,速度跟推程的速度大小以及变化是一样的,整个速度变化符合等减速等加速运动。(3)加速度:在0~2.5 s时间段,加速等基本保持在4 mm/s2,在后续的各时间段,加速度也是基本保持不变,即加速度也符合等减速等加速运动中的加速度变化规律。通过上述仿真结果分析,该凸轮是符合预期设计要求的。

图4 凸轮仿真结果图
1.7 驱动控制设计
1.7.1 伺服电机的选型
进行伺服电机选型之前需要确定的机械信息主要包括负载质量、推力负载惯量、惯量比等。由该仿生按摩机器人的机械结构特性可知,其负载主要有凸轮、推杆以及滚子,出于节省前期开发成本的目的,采用3D打印技术来加工零件,负载的相关信息如表1所示,其中由于凸轮的不规则,选择它的最大半径50 mm来进行计算,所以总的负载惯量为JL=1.485 3×104kg·m2。

表1 负载信息
根据上述机械信息预选一个自带减速机的电机SGM7A-04A系列,该系列电机除了减速比不同,电机的额定转矩等参数都是相同的。进而确定力,减速比与力矩之间的关系,如公式1所示,
F=(T/r)*R
(1)
其中R为减速比,r为电机轴半径,T为力矩。由手法生物力学特性可知,最大推力F为228 N,电机轴半径r为19.1 mm。SGM7A-04A系列有几种减速比,若选择1/11减速比,则所需转矩T=0.871 N·m小于电机额定转矩1.27 N·m,满足需求。根据惯量比公式,计算结果为3.51<20,同样满足需求。
确定运转模式:主要确定电机的加减速时间、匀速时间、移动距离等参数。根据凸轮仿真结果可知电机加速时间ta=0.1s,减速时间td=0.1s,匀速时间tb=15s,移动距离S=0.02m,根据式(2)和式(3)可算出电机的转速N=4 r/min≪273 r/min,也满足需求。

(2)
N=Vmax·60/S
(3)
由于摩擦力很小,所以忽略摩擦系数。移动转矩如式(4)所示,查阅机械手册,选择机械效率η为0.9,F为推力,计算出Td=0.726 N·m;加速时转矩如式(5)所示,计算出Ta=0.768 7 N·m<4.46 N·m,即瞬时最大转矩小于电机最大转矩,满足设计要求;减速时转矩如式(6)所示,计算出Td=0.683 2 N·m;有效转矩如式(7)所示,计算出Trms=0.527 N·m<1.27 N·m,即有效转矩小于电机额定转矩,满足要求。

(4)
(5)

(6)

(7)
根据上述计算结果,该仿生按摩机器人的伺服电机最终选为SGM7A-04A系列中的SGM7A-04A-ABH伺服电机,电机额定转矩为1.27 N·m,最大转矩为4.46 N·m,转动惯量为0.21×10-4kg·m2,额定功率为400 W,经减速机后的额定转矩为11.5 N·m,最大转矩为45.1 N·m
1.7.2 伺服电机的控制
要使伺服电机控制凸轮按照预期的受力趋势运动,就需要时刻改变其力矩,从而改变力度。因此根据式(8)计算出本研究中的阻力矩,从而知道电机的力矩变化,其中k为弹簧系数,s为位移,微分可以理解为位移对角度的求导,因此需先求出位移和角度的关系图,如图5所示。

(8)

图5 位移和角度关系
对其进行曲线拟合后,将图5每个位移与角度的函数进行求导,然后带入式(8)中进行计算,得到阻力矩的变化如图6所示,且计算出的最大阻力矩为43.333 N·m<45.1 N·m,符合设计要求。
由于安川系列电机自带上位机操作软件SigmaWin+,所以直接使用配套软件来对伺服电机进行控制,根据图6中力矩和角度的关系,设计加速时间、减速时间、位移距离等参数,让电机在力矩模式下运行,通过控制电机内部线圈的电压电流,改变电机的转矩,从而改变电机的输出力。

图6 力矩和角度关系
2 实验
2.1 实验方案
本次实验主要考察仿生按摩机器人的按摩力度和按摩行程是否满足要求,由于这两者主要由凸轮机构决定,因此本次实验选择加工凸轮机构部分的零件,搭建临时实验平台固定凸轮机构和伺服电机。采用Micron Tracker公司生产的双目视觉系统采集仿生按摩机器人的按摩行程数据,采用数显推拉力计采集仿生按摩机器人的按摩力度。
2.2 按摩力度实验数据分析
本次按摩力度实验主要为了考察仿生按摩机器人对治疗医师的按摩力度重现的效果,并对其进行拟合曲线比较。因此使用数显推拉力计重复10次采集按摩装置前端的最大垂直压力,对按摩机器人性能进行重复性误差分析,使用标准法和极差法评估按摩装置的稳定性。由于治疗医师的按摩力度千变万化,不利于比较分析。因此将其标准化,即仿生按摩机器人统一按线性进行施加压力。对仿生按摩机器人的各个阶段的按摩力度进行曲线拟合。并将拟合结果与治疗医师的按摩力度拟合曲线比较。结果如图7所示。
本研究采用线性度评价观测值与真实值之间的误差度和拟合曲线的吻合程度。常用的统计学评价方法是相对误差,即绝对误差与真实值之比乘100%所得数值,反映了测量值偏离真实值的程度,其结果越小越好。由图7中可以看出,在推按阶段按摩机器人的按摩力度与治疗医师的按摩力度的平均相对误差为10.9%;在保持阶段按摩机器人的按摩力度与治疗医师的按摩力度的平均相对误差为8.3%;放松阶段按摩机器人的按摩力度与治疗医师的按摩力度的平均相对误差为12.9%。从图7中可以发现在推按阶段和放松阶段的末端,拟合曲线均出现了一定程度的偏差,这是由于本次实验采用的是临时固定平台,并未加工完整的机架零件,因此推测推按阶段和放松阶段出现的波动是由于临时固定平台所引起的。待后期进一步完善机械结构后,加工完整零件后可对该仿生按摩机器人推按阶段和放松阶段末端的稳定性进行进一步验证。
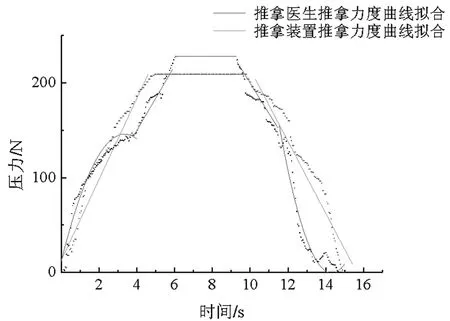
图7 仿生按摩装置按摩力度拟合(彩图)
2.3 按摩行程实验数据分析
本次按摩行程实验主要为了考察凸轮机构中的从动件的实际运动行程对理想运动行程的重现效果。因此使用Micron Tracker双目视觉系统重复采集从动件的最大位移,并进行重复性误差分析,使用标准差法和极差法评估按摩行程的稳定性。同样对仿生按摩机器人各个阶段的按摩行程进行曲线拟合。将拟合结果与理想运动行程的拟合曲线进行比较,其结果如图8所示。

图8 仿生按摩装置按摩行程拟合(彩图)
同样采用相对误差对按摩行程实验结果进行分析,由图8中可以看出,在推按阶段从动件的按摩行程与理想按摩行程的平均相对误差为5.25%;在保持阶段从动件的按摩行程与理想按摩行程的平均相对误差为5.01%;在放松阶段从动件的按摩行程与理想按摩行程的平均相对误差为19.22%。由图10中不难发现,在推按阶段和保持阶段按摩机器人对理想按摩行程的重现是比较理想的,但是在整个放松阶段,实际按摩行程与理想按摩行程之间出现了较大的偏差。同样猜测是由于临时固定平台对凸轮机构中的弹簧固定出现了问题,在后期完善机械结构,加工完整零件后对该仿生按摩机器人放松阶段的按摩行程的稳定性进行进一步验证。
3 总结与展望
本文根据坐位调膝法的生物力学特性设计了一款针对KOA推拿治疗的仿生按摩机器人。该仿生按摩机器人在推按阶段,保持阶段较好地还原了治疗医师的按摩力度变化曲线和预期的按摩行程曲线,但是在放松阶段力度曲线和行程曲线的拟合均出现了较大的偏差。由于本次实验只加工了末端执行器部分的零件,未对机架等零件进行加工,实验中采用临时固定平台对末端执行器进行固定,因此推测放松阶段的曲线拟合失真是由于临时固定平台所引起的。待后期完善机械机构后对整机零件进行加工后将对该仿生按摩机器人放松阶段的曲线拟合效果进行进一步的验证。目前该仿生按摩装置仅实现了单方向垂直力的重现,后期将对按摩力方向多元化展开进一步研究。
通过本研究可以发现,虽然该仿生按摩机器人在放松阶段的曲线拟合还存在不足,但其在推按阶段和保持阶段的表现还是令人满意的。随着进一步优化机械结构和控制手段,利用该仿生按摩机器人代替治疗医师为患者施加坐位调膝法是完全可行,并极具应用前景。通过仿生按摩机器人大大减轻专业治疗医师的工作强度,使其可以将更多精力投入到按摩手法的优化上而不是日日夜夜地重复重体力劳动,从而不断推进中医推拿治疗技术的进步,最后由衷感谢为本研究提供研究数据的众多学者和岳阳医院推拿科。
