采用极坐标复合运动模态的大型车辆输送机构设计
2019-12-30孔维雄宋书飘
杨 航,孔维雄,宋书飘
(遵义师范学院工学院,贵州遵义563006)
1 前言
随着科学技术带动经济的发展,人们的生活水平不断得到提高,汽车成为人们必不可少的一部分[1]。汽车不再以运输货物为用途,更多的是成为人们的出行交通工具。汽车的增多就需要更多的停车位,必须把停车位的空间利用率提高,所以出现了立体车库[2-4]。特别在一些发达国家对于出现的车多停车位少的问题,他们积极开展研发能解决停车的机械式停车技术。通过相关技术制造投入市场所使用,解决了出行停车难的部分问题。特别以德国研发的立体停车装置处于领先地位,他们研发的停车库形式多种多样,能满足不同地形的使用要求[5,6]。在欧洲地区立体停车设备并不少见,以巷道堆垛式、多层升降横移式的停车车库为主[6,7]。在美国,立体停车库得到快速发展,在有的大型商场都会见到机械式立体停车装置,并且种类繁多[8]。
近年来,中国经济快车飞速开来,加快了城市化进程[9],汽车制造技术不断得到提高,特别是小轿车市场需求得到快速发展,使得汽车保有量的不断增加[10]。停车难的问题主要体现在都市的住宅小区、写字楼、购物中心等地区。然而,在城市建设中没有对停车设施考虑到位,停车位的增加速度却始终跟不上汽车的增加速度。在短期能够缓解停车难的问题,最主要方法就是建设立体停车库。
2 大型车辆输送机构类型及特点
机械式立体停车装置的种类繁多,根据原理和设计结构的不同可分为六大类,分别为:垂直循环式立体车库[11,12]、垂直升降立体车库[13]、简易升降设备[14]、多层升降横移、无避让停车设备[15,16]、两层升降横移设备,这几类停车装置各有其特点和优势。所以选择的类型比较多,用户可根据地理环境的不同选择安装合适的停车装置。
垂直循环式立体车库是现有的最常见的停车装置,只使用差不多两个车位的面积就能建设这样一个停车库,能停下十几辆小桥车,所以极大的提高了车位的利用率。垂直循环立体车库是以垂直方向做循环运动的停车系统,完成存取车辆。
垂直升降立体车库是利用提升机构将小汽车提升或者下降到指定层,并采用存取交换机构存取小汽车的机械式停车设备。简易升降设备是在地面层直接存取车,上层车位降下后可取下层车位的车辆,取上层车位时,地面车位必须开走。其特点是二倍增加车位、设备结构简单、安装操作简单、出入车视野开阔。
多层升降横移设备,此类停车库主要由升降机构、搬运小车机构、停车板来完成,升降机可作上、下运动。
无避让停车设备,下层小车不动,将载车盘移动到相应位置,车主将车开上载车盘,通过提升机构提升到一定的高度,接着顺时针旋转90。,然后再移动指定的距离小车就停入库中,取车便是相反的操纵运行。
两层升降横移设备,利用存车板的升降(和)横向平移存取停放车辆的机械式停车设备。对土建要求较低,可建在露天,也可以建在建筑的地上、地下、规模可大可小,可根据不同的地形和空间进行适当的装配组合。所以这类停车库装置运用较为广泛。
3 基于极坐标复合运动模态的车辆输送机构
关于立体停车库的设计有很多种类,但各种车库都有不同形式的优缺点。本文所设计的停车库是基于极坐标运动的形式来设计,极坐标运动也就是旋转运动[17]。虽然也有人发明了一种类似摩天轮的停车装置,但是这类停车装置只依靠重力来提供平衡,在运行过程中会存在摇摆晃动的现象。为了解决车位的摆动,设计了这款新型的停车装置,该停车装置采用减速电机驱动,链条传递动力。使用SOLIDWORKS进行三维建模,得出该停车装置设计模型如图1所示。通过链传动带动连杆旋转来实现停车托盘的升降。并根据停车托盘的运动轨迹设计定位圆环,安装定位圆环来限制车位的移动,解决汽车在运行过程中出现滑移或摇摆的现象,使每个停车托盘始终保持水平,提高停车安全系数。该装置共有8个停车位,相邻两个车位之间与回转中心的连线所构成的夹角为45。。由于车辆输送装置采用极坐标形式,在旋转方向具有对称等效性,因此车辆间的层高不会随着车辆具体位置发生变化。其层高差始终为旋转半径的1/。图中每个停车位对应一个停车托盘,一个停车托盘只能停一辆车。
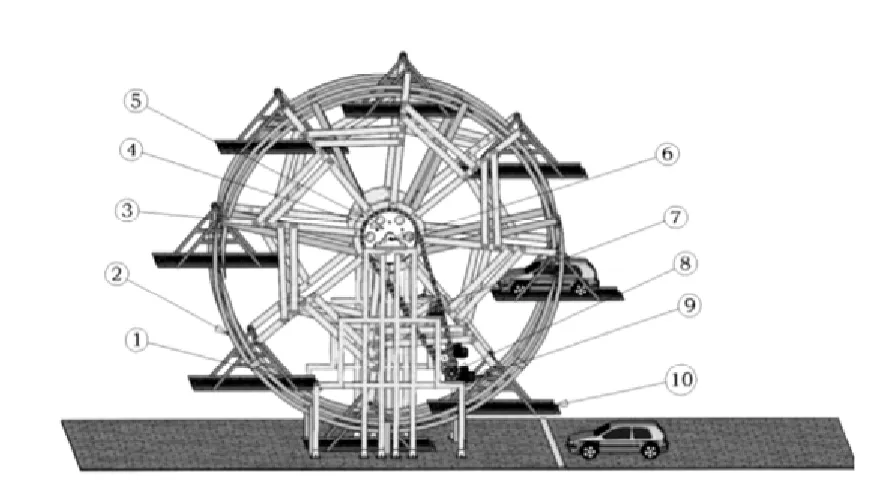
图1 极坐标停车库总体图
驱动机构采用电机9和减速箱8所组成的减速电机驱动,能提供足够的转矩并且在不工作时能够实现自锁。用链条和链轮传递动能,链条带动大链轮4,驱动转盘5及连杆3旋转实现停车托,10的停车位的移动,为了提供比较大的力矩,所以在支承架1的两边都安装有相同的减速电机,并安装压紧轮7来压紧链条。在链条的带动下同时启动两边的大链轮4,大链轮4与转盘5用螺栓连接固定在一起绕中心轴6转动,停车托盘10上的小车会在重力的作用下会保持水平,但可能会受到外界因素的影响,出现摇摆不定的现象,比如在刮风下雨时很可能出现停车托盘摇摆不定,所以安装了定位圆环2,停车托盘10就在定位环2所固定的路线上运动,起到限制每个停车位不摇摆晃动。停车位以极坐标运动的形式稳定运动,实现停-取车辆的目的。
大部分的设计的停车装置只能停小型桥车,而现在市场上的SUV型汽车在长、宽、高方面都比普通桥车大。为了能够使停车装置能够停下多种类型的车辆,停车托盘的长宽高的设计是以现在市场最常见的MPV型小车的大小所设计的,这类车型的长宽高都比一些家用SUV大,其长为4780mm、宽为1780mm、高为1755mm,所以能够容纳很多类型的车辆。要使停车托盘在运动的过程中始终与地面保持平行,所以加装了定位圆环是必不可少的,它能保证车子停在托盘上不晃动,防止危险事故的发生。
4 输送机构机电一体化详细设计
4.1 基于极坐标运动的停车装置总体结构
4.1.1 停车装置的主系统
如图2所示为停车装置的主系统,是由支撑架、支座、大链轮、停车托盘、转盘与连杆等组成,支撑架是采用普通碳钢所焊接的钢架结构搭建而成,支座与中心轴连接固定不动,大链轮和转盘用螺栓固定在一起并绕中心轴转动,连杆与转盘再用螺栓连接安装在一起,连杆又与停车托盘用轴连接,当大链轮转动时停车托盘就能够上下移动,实现移动车位的目的。

图2 极坐标停车装置主系统
4.1.2 停车装置的定位系统
定位系统是由连杆、停车托盘、定位圆环等组成,定位系统具有保护的作用,是固定停车托盘不会在运行的过程中或是其他外力的作用下摇摆晃动,如图3所示是该停车装置的定位系统,停车托盘的两侧都有凸出来的圆柱,圆柱能够在定位圆弧沟槽中移动,就能将停车托盘固定轨迹运动。可以将停车托盘、连杆、定位圆环三者看作构成了个三角形,因为三角形具有稳定性,所以停车托盘就不会摇摆晃动。

图3 定位系统
4.1.3 停车装置的驱动系统
驱动系统由电机、变数箱、链条、压紧轮、链轮等所组成,通过PLC编程技术控制,如图2、3所示。该机构装置采用电机与减速箱构成的减速电机启动,减速箱中有蜗轮蜗杆,这样构成的减速电机能够自锁,并且在支撑架上安装两个电机。需要两个减速电机同步启动,这样才能够提供足够的运行功率,因为可能出现启动不同步的现象,所以需考虑两个电机启动后所产生的耦合性问题。在加上启动时通过链条传动时会出现瞬时传动比不恒定的现象,所以在选择电机时需要优先考虑电机转动时转速的准确度。电机通过减速箱传递力矩,减速箱是否能够提供足够的转动力矩才能让把转盘转动?这样需要计算电机的功率,选择合适的电机。

图4 驱动系统
通过查阅资料,一般的家用桥车的重量在1200kg到1300kg之间,中高级桥车的重量在1400kg到1600kg之间,一些SUV的重量在1900kg左右,为保证安全承载重量,我们设定汽车与停车托盘的最大重量为m=2300kg来计算,在运行过程中防止停车托盘摇摆不定,所以需要链轮的运动速度小并且匀速转动,所以取大链轮的转速为n=1.5r/min。减速箱的传动比设为1:96,小链轮与大链轮的传动比为1:10。
电机的输出功率:

根据作用于转动刚体上的力的功率等于该力对转轴的力矩与速度的乘积,即变速箱的输出功率为:


图5 停车托盘的重力对连杆的作用力图
如图5所示,当停车托盘的重力相同时,对中心轴的力矩为:

当重力只在虚线的右半部分时,对中心轴的力矩为:

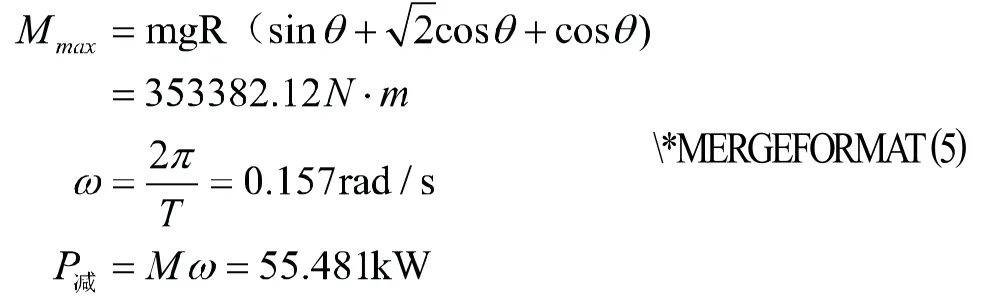

图6 对中心力矩最大点处的函数图像
由于是两个电机驱动,所以单个减速箱的功率为27.74kW,经过查《机械设计手册》取联轴器的效率为0.993;轴承的效率为0.996。带入上式得:

电机的功率为:

根据计算结果选择电机的型号,选取型号为Y200L.2的电机,其转速为1440 r/min、额定电压380V、效率90.5%、功率因数0.89,可控制正反转。
4.2 极坐标复合运动模态智能控制
该停车装置的转盘在运行过程时会根据系统测出的情况运行不同的角度,由于该装置共有8个车位,所以连杆之间的夹角是450,转盘会出现顺时针转动 180。、135。、90。、45。或逆时针转动 180。、135。、90。、45。的情况。
当车主需要停车时,存储按钮,停车系统通过判断距离地面最近空车位,PLC记录此位号并打印条形码,无车位则不能打印出条形码。就类似于超市里面的免费储物柜的工作原理,车主收起条形码,条形码丢失造成不能取车只能由工作人员来取车。电机通电后通过链条和链轮的带动,将停车托盘转到停-取车的位置,此时电机停止工作,只能等待下一个车主来输入信号是存车还是取车。转盘转动的距离由旋转编码器计算,利用PLC的高速计数器功能处理此信号,待车主将车开到停车托盘的指定位置后便停好了车辆。取车过程则是将条形码对准扫面口,系统识别出停车位,电机通电后经过链条和链轮的带动,将转盘转到停-取车的位置,电机同样停止工作等待下一个信号的输入,车主就能开走自己的车,如图7所示为停-取车的路线图。

图7 停-取车过程运行路线图
5 车辆输送装置动力学设计与尺寸校核
5.1 单个车库的设计

所以停车托盘在运行过程中既有水平方向的运动,又有竖直方向上的运动。在运行过程中如果遇到雨雪天气,车身上的淤泥会被洗涮下到停车托盘上,又会流到下方停车托盘的车辆上,弄脏其它车辆,所以设计了如图8所示的停车托盘,在托盘中留有承载雨雪的沟槽,在沟槽的上方用网状板铺垫,这样不仅能让雨水流入槽中,还能增大车轮与板的摩擦系数,防止车滑动。

图8 停车托盘模型图
5.1.1 车轮限位装置的结构
在停车时需要将车停靠在指定的位置,防止干涉其他停车托盘的运行,这时候需要一个装置来限制车辆是否停止到位,考虑到停车盘的质量不能太重,因此不能再在车盘中加装其它驱动机构,只能通过传感器信号来控制车辆的停放位置。如图 9所示,在停车托盘的图示位置上安装车感信号感应器,当车移动到位时信号灯会发出绿光,当超出停车范围时会发出红光。
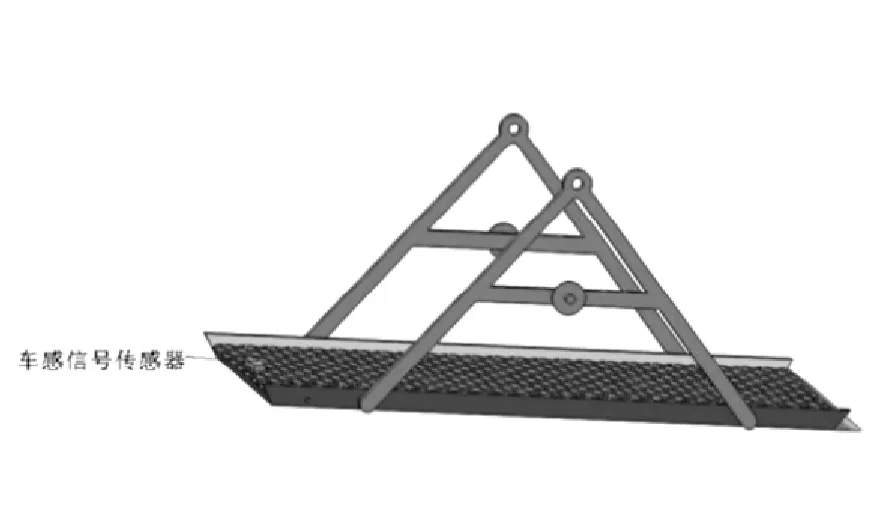
图9 传感器安装位置
5.1.2 定位圆环限位装置的安装布局
定位圆环限位装置是为了能让停车托盘能够保持水平实现平动,防止车辆在车盘上出现摇摆晃动的现象。所以设计了定位圆环用来实现停车托盘的限位作用。定位圆环是根据双曲柄机构的机械运动原理设计,是将从动曲柄的运动用圆环代替,在双曲柄机构中,两个曲柄的长度相等并且平行,则称其为平行四边形机构,图10所示平行四边形机构。这种机构最显著的特点连杆作平动,该定位圆环的安装布局原理就是按照平行四边形机构运动原理进行安装。

图10 平行四边形机构
从上图可看出两杆的运动轨迹出现相交的现象,所以设计定位圆环就分成了两部分,因此限位装置在安装的过程中比较困难,因为这个装置是一个分割成两部分的圆环,上半部分是和中心轴固定在一起,通过机械零件连接,可以上下调节圆环与中心轴之间的距离,中心轴是固定在支座上不作转动,定位圆环就固定不动。下半部分固定在地面上,需要调整圆心与上半部分的圆环相重合,才能保证停车托盘在运行过程中不会出现卡死的现象。
5.1.3 停车盘限位装置的作用

图11 限位装置布局图
如图11所示,定位圆环中的槽口是停车托盘上两侧凸出的圆柱体运动的轨道,定位圆环就能限制停车托盘的摆动,圆柱体能够在定位圆环中移动,停车托盘、连杆、定位圆环和机架四者构成双曲柄机构,也称平行四边形机构,保证了停车托盘始终水平。
5.2 模型的运动仿真分析
利用 SOLIDWORKS所带的插件 SOLIDWORKSMOTION做运动仿真。运动仿真能够减少机械产品在设计当中遇到的问题,可以有效的防止设计时出现的问题。此外,这款软件里面的有限元插件还能与SOLIDWORKSMOTION所输出的运动载荷实现有机结合,从而有利于对运动构件的强度进行校核。
将停车装置的三维模型建好后,在装配的环境下设置好配合关系,才可以进行仿真。利用SOLIDWORKSMOTION插件进行仿真。给大链轮添加旋转运动,通过表达式填写连杆的受力。设置完以后,分析时直接点击MOTION分析,再点击计算算例后,软件就生成运动动画,其中进行零件的干涉检查是仿真运动的一个重要作用,运动仿真分析后并没有发现零件之间存在干涉,所以初步认定结构设计合理。并计算出停车托盘的加速度,平均转动力矩,如图12所示。

图12 停车托盘运动仿真图
5.3 减速箱轴的尺寸校核
减速箱的输出轴受力较大,受力情况比较复杂,所以要对此轴进行受力分析。减速箱的轴的直径为=0.09m,轴的材料为40Cr,查资料得知其许用切应力[]=211.1MPa,在前面已经得出减速箱需要提供的最大功率为max=27.74kW,因为小链轮与大链轮的传动比为1:10,大链轮的转速为=1.5r/min,再由公式=M得出,减速箱需要提供的转矩为:

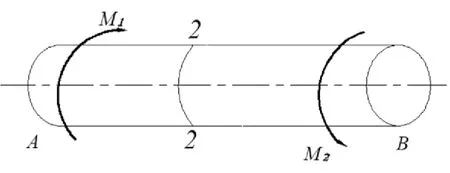
图13 减速箱输出轴的受力图
输出轴可看作为等直圆杆,如图13所示是轴的受力图,在轴上的力偶矩为=17660m。先求轴中间任意横截面2-2上的扭矩,应用截面法将轴沿横截面2.2处假想地截分开,并研究其左半段轴的平衡。由平衡方程

按轴的变化情况,规定轴因扭转而使其纵向线在某一段内有变成右手螺旋线的趋势时,则该段轴截面上的扭矩为正,反之为负。作出轴的扭矩图,如图14所示。

图14 减速箱输出轴的扭矩图

扭转截面系数以及强度校核条件为:
所以,满足强度要求。
6 总结
基于极坐标运动复合运动模态的停车装置采取减速电机驱动、链条传动、PLC编程控制等。本文所设计的停车装置可以解决都市的住宅小区、写字楼、购物中心等地区停车难的问题,该停车装置具有容量大、空间利用率高、机械结构简单、泊车方便、安装和维护方便、占地面积小等优点。
根据停车托盘的运动轨迹设计定位圆环,安装定位圆环来限制车位的移动,解决汽车在运行过程中出现滑移或摇摆的现象,使每个停车托盘始终保持水平,提高停车安全系数。该装置共有8个停车位,相邻两个车位之间与回转中心的连线所构成的夹角为45°。与直循环式立体车库、垂直升降立体车库比较起来,在停车效率方面具有优势,前两者场地利用比一般为1:2,本装置可以达到约2.2:8。与多层升降横移等车辆输送装置比较起来,虽然在场地利用效率方面不足,但是在使用的便利性和可靠性方面有优势。
装置的主系统是由支撑架、支座、大链轮、停车托盘、转盘与连杆等组成;定位系统由停车托盘、连杆、定位圆环;驱动系统由电机、变数箱、链条、压紧轮、链轮等所组成。以极坐标的运动原理所设计的机械式力体停车库,首先确定这种立体车库的可行性,设计的各零部件是否满足其设计要求,通过运动仿真和静力学仿真分析,验证结构的可行性。
立体车库有着很大的发展空间和很多的使用价值。有些停车库已经作为一些特殊的建筑,引来更多的人的重视,所以研究立体停车库的人越来越多,在空间的利用率得到提高,从手动变为自动,并不断取得新的进展。设计出符合地形地貌的立体停车库,满足人们的使用需求,不再让交通变得拥堵,提高出行速度,同时提高了办事效率。
