一种旋转电压注入的电压开环控制的直流偏置抑制方法
2019-12-24张舟云
张 冀, 张舟云
(上海电驱动股份有限公司,上海 201806)
0 引 言
在新能源汽车领域,永磁同步电机以其高功率密度,高效率的优点,成为驱动电机的主流。为了使车辆获取更高的运行速度,必须对电机进行深度弱磁,最高运行速度常常是额定转速的数倍以上。与异步电机相比,永磁同步电机的弱磁方法较为复杂,在不同运行区域呈现出不同的弱磁特性。另外,弱磁特性与电机参数相关,而电机参数特别是交直轴的电感会随着电流急剧变化,因此也会导致弱磁特性的动态变化。因此永磁同步电机的弱磁方法一直是研究的热点。目前主要有弱磁电流反馈补偿法[1-2]、电压角补偿[3-4]、查表法[5]、q轴电压误差法[6]、单PI参数法[7]等。这些方法在一定程度上给出了弱磁方法的方向,但是对于工程来说,需要考虑电机差异、现场调试可控性及时效性等问题,因此需要时间成本更低的工程方法。
一种较为快速有效的永磁同步电机弱磁特性工程整定方法是,在不同的转速区域,采用电压开环给定的方式,使电机直接运行在电压环上,由此直接得到电机的控制参数表。但是,由于逆变器环节存在非线性,电机本体存在三相不平衡等制造品质因素,使得开环控制时,三相电流存在直流偏置,且偏置随着功率上升而增大,这使得电流产生波动,导致电机输出扭矩也波动。对于大功率电机特别是商用车用电机来说,其峰值扭矩在1000 Nm以上,扭矩波动会产生噪声以及母线电压跳变问题,更重要的是会影响控制参数表获取时的扭矩精度,严重时会制表失败。
针对电压开环控制时存在的电流偏置问题,本文首先从理论上分析了偏置对交直轴电压的影响,得到存在旋转干扰电压分量的结论,再次设计了偏置抑制算法,通过注入与电频率同步的旋转电压来抑制干扰,最后通过实验验证了所提方法的可行性与有效性。
1 理论分析
1.1 电压开环控制
当电机转速上升至基速以上时,相电压达到最大,为了继续升速或增大输出功率,需要对d轴增加弱磁电流。电压矢量会在电压环上随着弱磁电流向uq等于零的方向移动,最终uq过零并停留在MPTV点上,达到该转速点下的最大功率。由于此时电机运行在电压环上,如果进行电流闭环控制,则一旦存在电流扰动或者PI参数失调,都容易使得调节出的电压矢量超出电压环,引起过压故障。

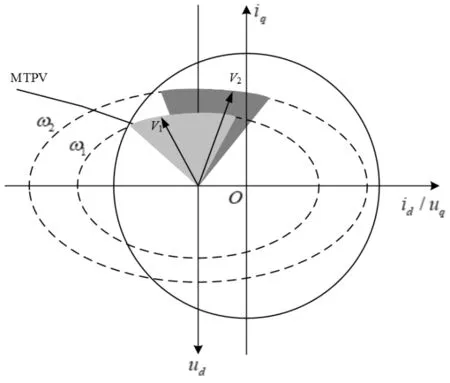
图1 电压开环控制原理
电压开环控制的实现框图如图2所示。dq轴电压为开环给定,不同的电压组合得到不同的dq轴电流和对应的输出扭矩,通过记录电流和扭矩,就可以得到电机的控制参数表。
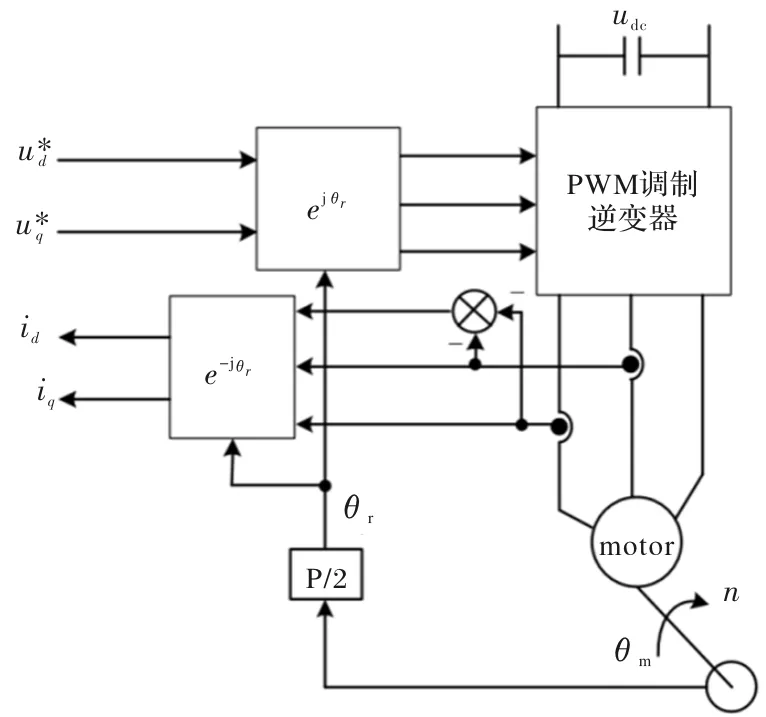
图2 电压开环控制实现框图
电压开环控制的方式具有简单、不用考虑电机参数的优点,但是由于没有调节器,抗干扰能力不足,仅能用于电机特性的确定,最终还是需要根据测得的参数表进行电流闭环控制。但是,参数表确定时需要电机应处于稳态,既转速、扭矩和电流应保持恒定,才能确定具体的控制参数。由于逆变器通常是非线性较严重的IGBT器件,另外电机本体工艺上也存在三相略微不平衡,因此在工程实测中,开环控制会导致三相电流出现直流偏置,进而引发电流波动和扭矩波动,对确定控制参数造成了困难。
1.2 直流偏置的影响分析
若含偏置的三相电流表达式为
(1)
式中,I1为a相偏置电流,I2为b相偏置电流。ia,ib,ic分别为a,b,c三相带偏置的交流电流,ia1,ib1,ic1分别为a,b,c三相理想的无偏置的交流电流。
转换至静止坐标系下:
(2)
式中,iα,iβ分别为相电流存在偏置时,转换至静止坐标系下的静态电流,iα1,iβ1分别为相电流不存在偏置时,转换至静止坐标系下的静态电流。
将式(2)转换至旋转坐标系下,可以得到:
(3)
式中,id,iq分别为相电流存在偏置时,转换至旋转坐标系下的静态电流,id1,iq1分别为相电流不存在偏置时,转换至旋转坐标系下的静态电流。
如果令:

则式(3)可以重新写做:
(4)
式中,p为微分算子。
带扩展反电动势的dq轴电压模型为
(5)
因此可以计算得到带偏置情况下的电压模型为
(6)
式中,ud,uq分别为相电流存在偏置时,转换至旋转坐标系下的静态电压,ud1,uq1分别为相电流不存在偏置时,转换至旋转坐标系下的静态电压。
若忽略定子压降,可以写成:
(7)

(8)
考虑到随着电流上升,Lq急剧下降,电感差增益I(ω+1)(Lq-Ld)相对于电机电压和功率等级的分量较小,因此忽略后可以得到:
(9)
写成矢量形式后:
(10)

1.3 旋转电压注入

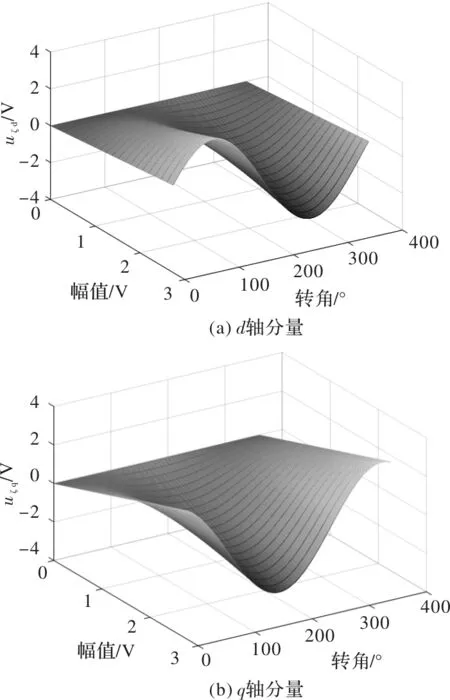
图3 干扰电压矢量dq轴分量
因此,只要在开环控制时,只要根据电流偏置大小,向dq轴分别注入一个旋转的补偿电压矢量,就可以消除电流偏置。且补偿电压矢量为:
(11)
对于电驱动领域来说,通常定义电机逆时针旋转时转速为正,顺时针旋转时转速为负,因此补偿电压分量的符号需要根据电机转速方向来制定,正转速和负转速的补偿电压分量符号相反。由于正反转速下相同扭矩对应的工况分别为电动和发电工况,因此电动和发电工况时的补偿电压分量的符号也相反。
2 实验验证
搭建如图4所示的对拖台架,进行算法验证实验。由测功机提供转速,被测电机进行电压开环控制,被测电机参数如表1所示,用示波器抓取旋转电压注入前后的三相电流波形。

图4 实验平台

表1 被测电机参数
测功机给定4500 r/min,被测电机电压控制的扭矩分别为125 Nm、175 Nm和210 Nm,对应电机输出功率分别为59 kW、83 kW和99 kW,注入旋转电压前后的电流波形如图5所示。可以看出,随着输出功率的上升,开环控制的三相电流中包含的直流偏置也随之增大,导致三相电流出现不平衡现象,这会导致根据三相电流和电机转角来计算的dq轴电流也出现波动,同样也会导致扭矩波动,这些都会影响控制参数表的精确获取,而在经过旋转电压注入后,三相电流的平衡性明显得到了改善,这意味着稳定的输出扭矩和dq轴反馈电流,有利于确定较为精确的控制参数。

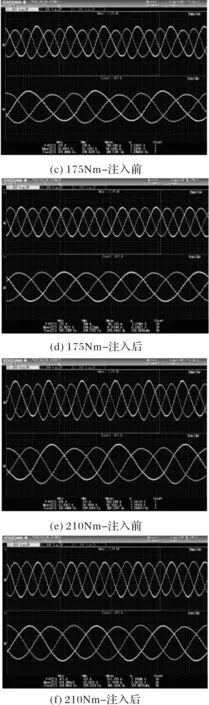
图5 4500r/min旋转电压注入前后电流波形
测功机给定7500 r/min,被测电机电压控制的扭矩分别为66 Nm、81 Nm和104 Nm,对应电机输出功率分别为52 kW、64 kW和82 kW,注入旋转电压前后的电流波形如图6所示。可以看出,注入旋转电压后,也得到了和4500 r/min相同的三相电流平衡性改善的结果。另外还可以看出,在输出功率基本一致的条件下,随着转速的上升,不平衡性进一步加剧,这需要更高幅值的注入电压,符合理论分析。


图6 7500r/min旋转电压注入前后电流波形
3 结 语
本文提出了一种旋转电压注入的方法,来抑制电压开环控制时三相电流中的直流偏置,从而获得稳定的控制参数。从理论上分析了直流偏置对交直轴电压的影响,推导了抑制算法,得到了旋转电压注入的理论依据,进行了实验。实验结果表明,所提方法对电压开环控制时存在的直流偏置具有明显的抑制作用,算法的有效性和可行性得到了验证。
