双稳悬臂梁电磁式振动能量采集研究
2019-12-23刘仲琳冷永刚刘进军范胜波
刘仲琳 ,冷永刚,刘进军,范胜波
(天津大学 机械工程学院,天津 300350)
近年来,无限传感器网络、微电子技术的飞速发展,使得电子设备及其电路系统越来越微型化和低功耗化[1-2]。由于很多微型电子设备的能源动力主要是依靠电池方式供电,而电池存在自身电容量有限需要定期更换或充电等不利条件,因此电池成为微电子设备持续供能的主要缺陷。为了实现微电子设备长时间不间断的供电,采用能够吸收周围环境能量的自供电装置来取代传统电池的方法受到广泛的关注,并成为研究热点,这种收集环境能量的系统就是能量采集系统或能量采集器[3-5]。
振动能是环境中普遍存在且获取方便的一种能源,因为环境中的振动现象处处可见,所以振动能量采集方法成为自供能式电源研究的主要内容之一。振动能量采集方式主要分为电容式、压电式和电磁式。电容式能量采集因为结构工艺复杂且能量采集效果低没有被广泛采用,而压电式和电磁式的能量采集研究相对较多。压电式能量采集器的结构简单,设计制造也方便,但其材料电阻高,输出电流很小[6]。电磁式振动能量采集器相比前两者所具有的优势是,质量轻、体积小、感测频率高、内阻比压电式的小、适用于各种恶劣的工作环境[7]。本文主要研究电磁式振动能量采集方式。
电磁式振动能量采集系统的工作机制是,利用环境中的振动使磁铁和线圈发生相对运动,引起线圈磁通量变化而产生感应电动势,实现机电能量转换,其通常的结构是采用线圈和永磁体单向运动形式来改变磁通量并产生感应电动势。Sato等[8]采用耦合分析法,研究了具有线性谐振特性的电磁式振动能量采集系统,该能量采集器只能在谐波共振激励条件下达到较大的能量转换。为了克服线性能量采集器只在谐振频率有较好的能量采集效果的缺陷,非线性电磁式振动能量采集器的研究越来越受到关注。Mann等[9]研究的磁悬浮式振动能量采集器,是在一个特氟龙管子的上下两端各固定一个永磁体,特氟龙管子内有一个悬浮永磁体,在特氟龙管子外侧绕制有上部铜线圈和底部铜线圈,中间永磁体的上下运动在铜线圈内产生感应电动势。这种振动能量采集器具有弱非线性单稳特性,虽然能使悬浮永磁体在一个较宽的频带范围内进行较大幅度的振荡响应,但其机械阻尼的存在在一定程度上降低了能量采集效果。Sari等[10-11]把几个悬臂梁串联成悬臂梁阵列进行“离散式”宽频带振动能量采集,通过MEMS工艺加工出几个长度不同的Parylene悬臂梁,线圈置于每个悬臂梁之上,永磁体正对悬臂梁阵列放置,在设定条件下获得0.4 μW的输出功率和10 mV的输出电压。Karami等[12]研究了一种双稳压电—电磁感应混合式振动能量采集器,这种能量采集器尽管可同时通过悬臂梁的双稳振荡实现压电效应和电磁感应的机电能量转换,但是这种混合能量采集方式存在结构优化与最大机电转换输出间的折中选择问题,因为压电片会使结构刚度增大而降低悬臂梁振动响应幅度,除非增大结构尺寸。即便混合转换能量总输出大于单项压电或电磁感应的转换输出,其后续电路的分摊损耗未必优于单项压电或电磁感应的电路损耗。Deng等[13]单独研究了双稳悬臂梁式电磁式振动能量采集方式,其外部两个磁铁的设置使系统显得有些冗余,对于变化的环境激励,两个外部磁铁间距以及悬臂梁磁铁与外部磁铁间距的优化调节可能是一个比较棘手的问题。
上述非线性电磁式振动能量采集,特别是双稳能量采集主要研究了谐波振动激励的机电能量转换规律,而实际环境振动通常是具有宽频带特征的随机振动。在宽带随机激励下电磁式振动能量采集系统具有何种响应特性,其机电能量转换效果如何是一个值得探索的问题。本文以双磁铁非线性双稳悬臂梁电磁式振动能量采集系统为研究对象,采用磁化电流法分析非线性磁力,探索随机激励下双稳振动的磁场变化对感应电动势的影响规律,为非线性电磁式振动能量采集的实际应用提供可行的研究方案和技术基础。
1 双稳悬臂梁电磁式振动能量采集系统
1.1 双稳悬臂梁振动系统
双稳悬臂梁振动系统的基本结构和受力分析如图1所示,系统包括基座G、悬臂梁C、悬臂梁末端磁铁A和基座上固定的外部磁铁B,两磁铁A和B完全相同,其中心距离为d且相互排斥。当外部激励P(t)引起基座振动时,由于非线性磁力的存在,悬臂梁C末端磁铁A的振动可呈现双稳态振动特征[14]。图1的双稳悬臂梁系统可简化成典型的质量弹簧阻尼模型,如图2所示的等效模型。
1.2 双稳悬臂梁电磁式振动能量采集系统
以上述双稳悬臂梁振动系统为基础,在系统中加入一线圈绕组,构成双稳悬臂梁电磁式振动能量采集系统(简称双稳梁电磁系统),如图3所示。线圈绕组由支撑板E固定在基座G上,外接负载R。线圈绕组空间中心O与磁铁A中心距离为L。线圈绕组截面与两磁铁水平轴线正交垂直。这样摆放线圈绕组位置,可使线圈截面相对磁铁A产生最大的切割磁感线效果。其工作原理是:外界激励P(t)通过基座G使悬臂梁C及其末端磁铁A产生振动,末端磁铁A与线圈产生相对运动,线圈截面内的磁通量发生变化,由此产生感应电动势,从而完成振动能量的采集与转化。

图1 双稳悬臂梁结构及受力分析图

图2 双稳悬臂梁系统等效模型

图3 双稳悬臂梁电磁式振动能量采集系统
2 系统结构动力学分析
2.1 双稳悬臂梁动力学建模
根据图2的等效模型,由牛顿第二定律,可得到双稳梁电磁系统的双稳悬臂梁结构的动力学方程为:
(1)
式中:Meq、ηeq、Keq分别为双稳悬臂梁结构的等效质量、等效阻尼、等效刚度。X(t)为悬臂梁和末端磁铁等效质量的振动响应位移,P(t)前面的系数k为集总参数模型的幅值修正因子,Fx为两磁铁A和B之间排斥磁力F在竖直方向上的分力。
Meq、ηeq、Keq可通过以下方程式(2)~(4)计算给出[15-17]:
Meq=M+33m/140
(2)

(3)
ηeq=2Meqξrωr
(4)

(5)
2.2 非线性磁力计算
采用磁化电流法[18]计算双稳梁电磁系统的两磁铁间非线性排斥力。根据磁化电流理论,处于磁场中的磁介质,其材料的内部和外部表面均会有宏观的磁化电流产生。由于被均匀磁化的永磁体为线性各向同性介质,因此其内部磁化电流消失,于是磁场作用力只考虑表面磁化电流。

一般情况下,各向同性的磁介质中的磁感应强度可表示为:
B=μH
(6)
式中:H为磁场强度,μ为磁导率,是真空磁导率μ0与空气的相对磁导率μr的乘积,即μ=μ0μr。这里空气的相对磁导率μr取值为1,则磁感应强度:
B=μ0H
(7)
双稳悬臂梁的振动响应主要由其竖直方向上受到的磁力Fx决定,而根据向量乘法可知,磁力Fx与y轴方向的磁场强度有关,如图4是两磁铁在水平位置的坐标关系,e为两磁铁水平位置表面间距,lb是悬臂梁长度,lA、wA、hA是末端磁铁A的长、宽、高。以磁铁B的中心为坐标原点,则末端磁铁A受到磁铁B在x轴方向上的磁力为其上下表面受到的磁力之和[18]:
Fx=μ0MAS(Hy2-Hy1)
(8)
式中:S为磁铁A上(下)表面的面积,Hy1和Hy2分别表示磁铁B在磁铁A上下两表面中心位置沿y轴方向上产生的磁场强度大小。
假设磁铁B的磁化强度大小为MB,方向沿y轴正方向,则在空间坐标一点(x,y,z),磁铁B在该点处产生的沿y轴正向的磁场强度表示为[19]:
(9)


图4 两磁铁在水平位置时的尺寸结构示意图
考虑到双稳悬臂梁的振动会引起末端磁铁A发生绕z轴转动,可得更精确的磁力计算式:
(10)
式中:φ是考虑双稳悬臂梁振动产生弯曲时,磁铁A的磁化强度MA方向与水平方向的夹角。
3.3 系统势能函数
不考虑重力影响,系统的势能包括悬臂梁的弹性势能和磁力竖直分力Fx对磁铁做的功,由此可得双稳梁电磁系统振动响应在X=X0时刻位置的势(能)函数为:

(11)
对式(11)进行积分计算,可给出势函数V(X)随磁铁间距d的变化趋势,如图5所示,其中积分计算的参数选取自表1和表2。可以看出,当磁铁间距d很大时,磁铁力的影响可忽略,系统实际为线性系统,其势函数为单稳,表现为只在原点处出现一个稳定的平衡位置;随着间距d的减小,系统由线性系统变成非线性系统,其势函数由单稳变为双稳,即在两个势阱处出现两个稳定的平衡位置,而在原点处出现一个非稳定平衡位置,且磁铁间距d越小,势阱越深。

图5 势函数V(X)随磁铁间距d和振动响应X的变化
3 系统电磁感应电动势分析
3.1 电磁感应电动势定义
根据法拉第电磁感应定律可知,线圈截面的磁感应通量(简称磁通量)发生变化即可产生感应电动势。而磁通量Φ表示磁感应强度B对线圈截面的面积分,即磁场通过线圈截面的某个面积元ds的磁通量dΦ为
dΦ=Bcosθds
(12)
式中:θ是面积元ds的法线方向与磁场磁感应强度B方向的夹角,那么对于通过任意曲面S的磁通量即为:
Φ=∬(s)B·ds
(13)
于是根据磁通量的变化率可得感应电动势表达式为[20]:
(14)
式(14)中的负号表示感应电动势方向。
3.2 感应电动势的分析与计算
当双稳梁电磁系统工作时,悬臂梁末端磁铁A的运动引起线圈绕组中磁通量的变化,使得线圈绕组产生感应电动势。由于悬臂梁任意时刻的振动位置都与其水平位置存在不同的转角,导致其末端磁铁A随振动时刻发生转角和位置的变化,因此线圈绕组中磁通量的变化随磁铁A的不同转角和位置而不同,所产生的感应电动势也随不同振动时刻而变化。
为了确定不同振动时刻线圈绕组因磁铁A振动而引起磁通量和感应电动势的变化,参考图4坐标系,这里以磁铁A的中心为绝对坐标原点,建立磁铁A与线圈绕组间的坐标关系。当末端磁铁A振动时,磁铁A在线圈绕组某一点处所产生的三坐标磁感应强度Bx、By、Bz分量中,因z轴方向上的磁感应强度方向始终平行于线圈截面,故Bz对线圈中磁通量的变化没有影响,所以只有x、y坐标方向上的磁感应强度才会对线圈绕组作用而产生电动势。由式(14)可得该电动势表达式为:


(15)
式中:φ是磁铁A的磁化强度MA方向与水平方向的夹角。
根据式(7)并考虑线圈匝数N可得到感应电动势和磁场强度之间的关系:
(16)
由式(16)可知,感应电动势的大小与线圈垂直面的磁场强度变化的快慢成正比,而磁场强度变化的快慢又与悬臂梁的振动速度成比例,因此感应电动势与末端磁铁A随悬臂梁的振动速度成正比。
因以磁铁A为中心的坐标系随磁铁A的振动不断发生变化,故线圈绕组相对磁铁A也不断发生位置移动,式(16)磁场强度可由式(9)得[19]:
(17)

(18)

3.3 线圈绝对坐标计算
为了准确获得运动坐标系中线圈任意一点的绝对坐标值,以悬臂梁从水平位置向上沿x轴方向振动至某一位置进行分析。因磁铁的振动限制在x-y平面内,故不考虑z坐标值的变化。随磁铁A运动的坐标系是一个相对坐标系,其运动可看成平移和旋转两部分运动的合成。
当悬臂梁带动末端磁铁A向上平移运动时,如图6简化示意图,其末端磁铁A中心点由原来水平位置平移至A′,原线圈中任意一点(x,y,z)的坐标变为(x′,y′,z)或(x-x(i),y-y(i),z),其中x(i)是末端磁铁中心点在x轴方向的响应位移,考虑悬臂梁形状修正函数,由x(i)可算得末端磁铁A中心点在y轴方向的位移[21]:

(19)

图6 运动坐标系平移变换示意图
将A′点坐标系旋转φ角度到实际振动角度位置,如图7所示,则线圈中任意一点坐标(x′,y′,z)变为(x″,y″,z)或:
(x′cosφ+y′sinφ,y′cosφ-x′sinφ,z)
(20)
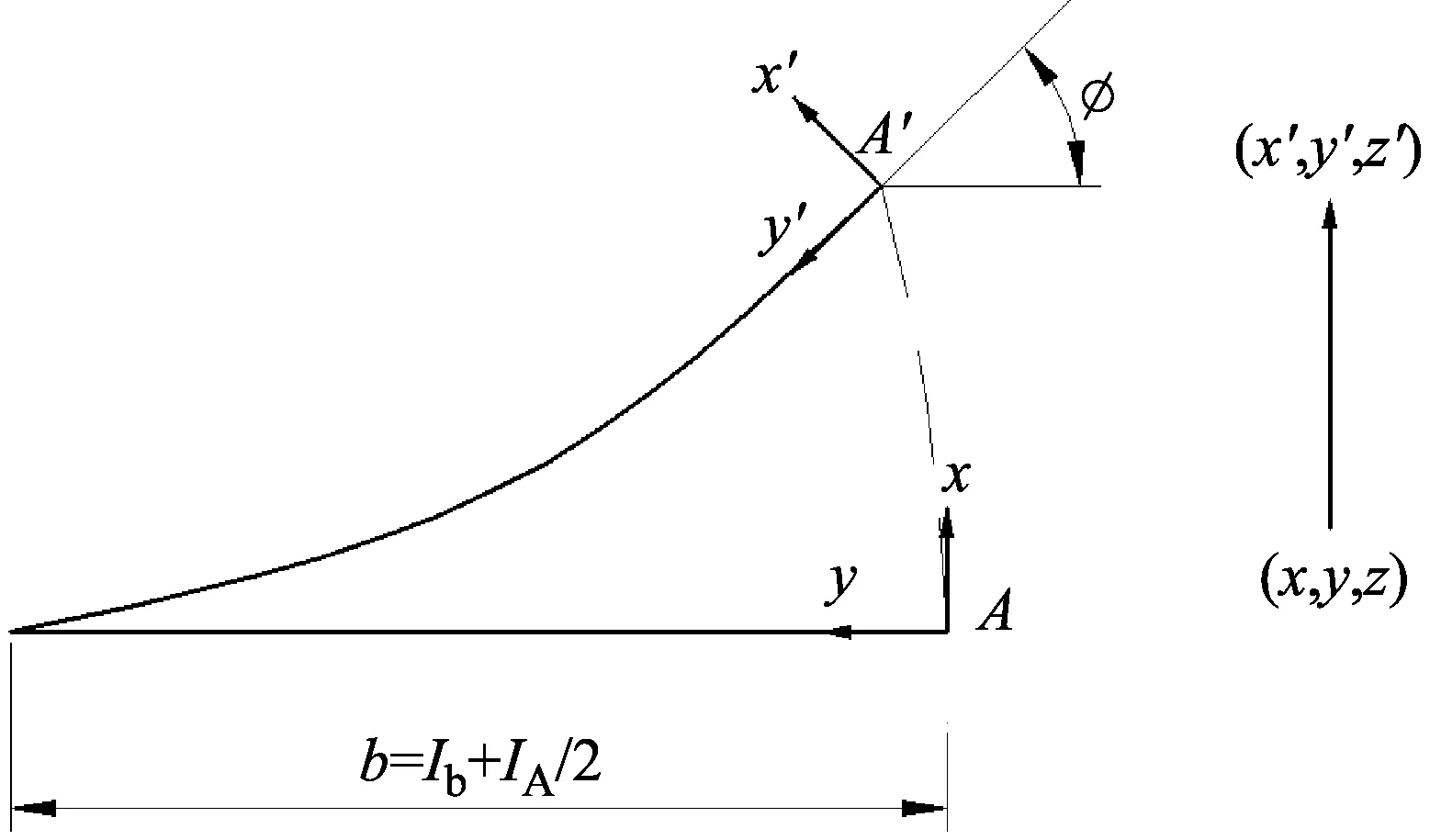
图7 运动坐标系旋转变换示意图
已知双稳悬臂梁振动产生弯曲时,磁铁A的磁化强度MA方向与水平方向的夹角可由下式计算[21]:

(21)
根据位移响应x(i),联立求解式(19)、(20)、(21),可得原线圈中任意一点坐标(x,y,z)相对于运动坐标系的绝对坐标(x″,y″,z)的值。
4 数值模拟
选取表1的一组材料及其属性参数和表2的几何结构参数进行模拟计算分析,计算分析中需要的其他参数是:机械阻尼比ξr=0.017 8。依照这些参数,研究宽带随机激励下双稳悬臂梁电磁式振动能量采集系统的特性。

表1 悬臂梁和磁铁主要材料参数
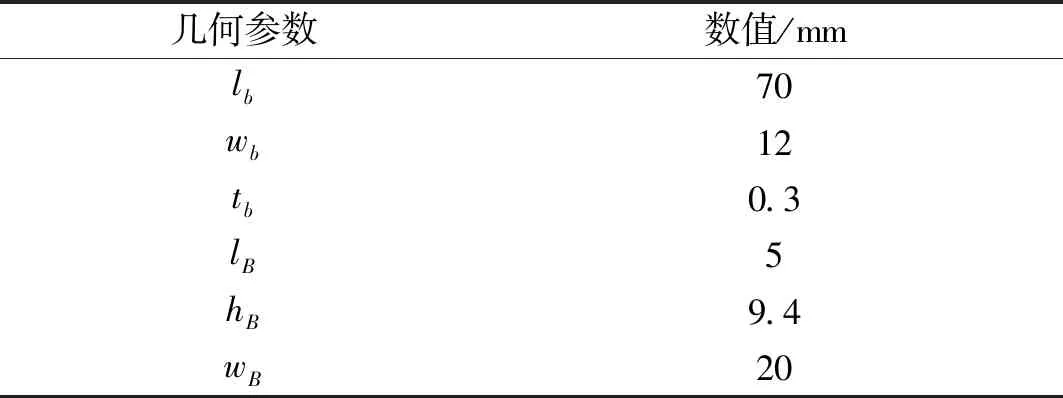
表2 悬臂梁和磁铁的主要几何参数
4.1 双稳悬臂梁振动响应特性
双稳梁电磁系统产生的感应电动势与悬臂梁的振动状态密切相关,悬臂梁是否处于双稳跃迁的响应状态,将直接影响感应电动势的输出效果。在不考虑线圈绕组阻抗的前提下,取激励强度D=0.05和带宽0~120 Hz的高斯白噪声激励P(t),采用四阶龙格库塔法(Runge-Kutta)对方程(1)进行数值计算,对于不同磁铁间距d,得到图8磁铁A位移响应x(t)的时间波形及其相图。
从图8可知,存在一个合适的磁铁间距d0=28 mm,可使磁铁A的振动幅度达到双稳跃迁的大幅度响应,而磁铁间距小于d0(如d=18 mm)或大于d0(如d=50 mm)时,系统响应将处于小幅振动响应。不难理解,对一定强度带宽的随机激励,合适的磁铁间距可使双稳振动的电磁系统产生较大的感应电动势。
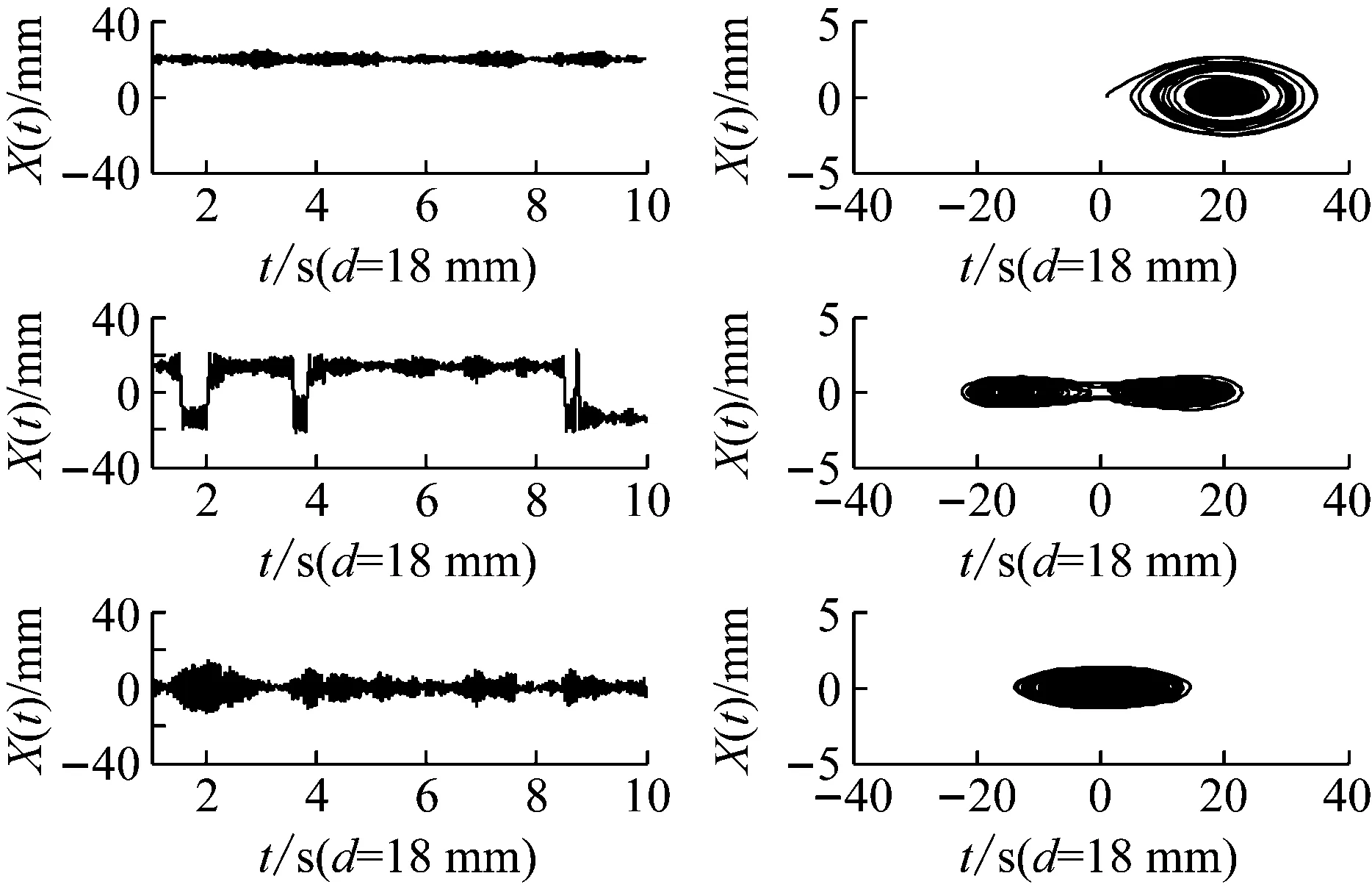
图8 系统振动响应时域图(左列)及其相图(右列)
4.2 双稳响应的电磁感应电动势仿真计算
本文线圈绕组的截面形状为正方形,其边长为15 mm,线圈匝数N=40匝。将正方形线圈截面均分为10 000个微元(正方形)面积。
根据上节较优磁铁间距d0=28 mm处双稳振动位移响应时间波形,并以其采样间隔Δt=1 ms确定磁铁A的不同时刻的振动位置,于是10 s的响应解一共可确定10 000个磁铁A的不同振动位置i,每一个位置对应一个响应x(i)。针对每个磁铁A的振动位置,计算N匝线圈每个截面的10 000个微元面中心绝对坐标值(x″,y″,z)处的磁场强度(Hx,Hy),将这10 000N个磁场强度相加,便可得到线圈绕组在磁铁A第i个振动位置响应解x(i)的总的磁场强度。
将相邻间隔Δt的两磁场强度相减并除采样间隔Δt,可近似得到磁铁A的两个相邻振动位置x(i)和x(i+1)在整个线圈绕组中产生的磁场强度H的变化率:

(22)
10 000个x(i)响应位置共可以求得9 999个相邻的连续磁场变化率,于是可根据式(16)求得此双磁铁非线性双稳悬臂梁电磁式振动能量采集器产生的感应电动势。为验证感应电动势计算方法的正确性,根据磁场变化率与磁铁A振动速度的正相关性,可将磁铁A的位移响应进行一次差分得到其振动速度,然后与感应电动势进行对比考察。图9(a)是磁铁间距d0=28 mm时磁铁A的位移响应,图9(b)是其速度波形(位移的一次差分求得),图9(c)是感应电动势的时间波形。可知,图9(c)线圈感应电动势与图9(b)磁铁A的速度的变化趋势保持一致,说明感应电动势计算方法的正确性。
(a) 位移

(b) 速度

(c) 感应电动势
5 实验验证分析
5.1 实验平台
为了验证理论分析和仿真结果,参照图3设计制作了双磁铁非线性双稳悬臂梁电磁式振动能量采集系统实验方案,其实验结构如图10(a)所示。激振器振动方向始终与重力方向垂直(或与地面平行),这样可忽略实验过程中悬臂梁与末端磁铁的重力对实验结果的影响。为了测量末端磁铁A的位移响应,系统中加入了激光位移传感器如图10(b)所示。实验分析时,悬臂梁和磁铁主要材料参数与表1一致,悬臂梁和磁铁的主要几何参数选自表2。整个实验系统的设备主要由双稳悬臂梁电磁式振动能量采集器、信号发生器、功率放大器、激振器、加速度传感器、数据采集器、激光位移传感器系统和计算机组成,其实验测试系统框架如图11所示。加速度传感器是用来测量激振器的振动强度,以保证多次试验的振动强度一致。而激光位移传感器主要用来测定末端磁铁A的位移响应。此外,感应电动势由NI PXI-1033数据采集仪中的电压采集模块测量。

(a) 双稳悬臂梁电磁式能量采集系统实验结构
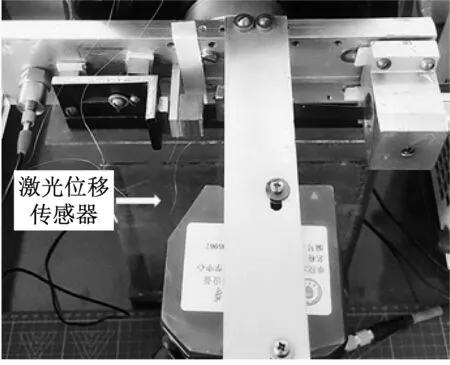
(b) 附加激光位移传感器
图10
Fig.10 Electromagnetic vibration energy Harvester based on Bi-stable cantilever beam the experimental structure; laser displacement sensor
实验中,首先在计算机中生成带宽为0~120 Hz的随机激励数字信号,如图12,然后通过USB接口输入给信号发生器,再由信号发生器输出,经过功率放大器和激振器作用于电磁能量采集器上。激振器产生的激励强度(加速度)、电磁能量采集器(负载)产生的感应电动势、悬臂梁的位移由多通道数据采集器进行采集,并在计算机中进行分析。采样频率为1 000 Hz。线圈绕组匝数为40匝。激振器激振强度的加速度有效值保持在0.48 g左右。

(b) 频域图
5.2 实验结果分析
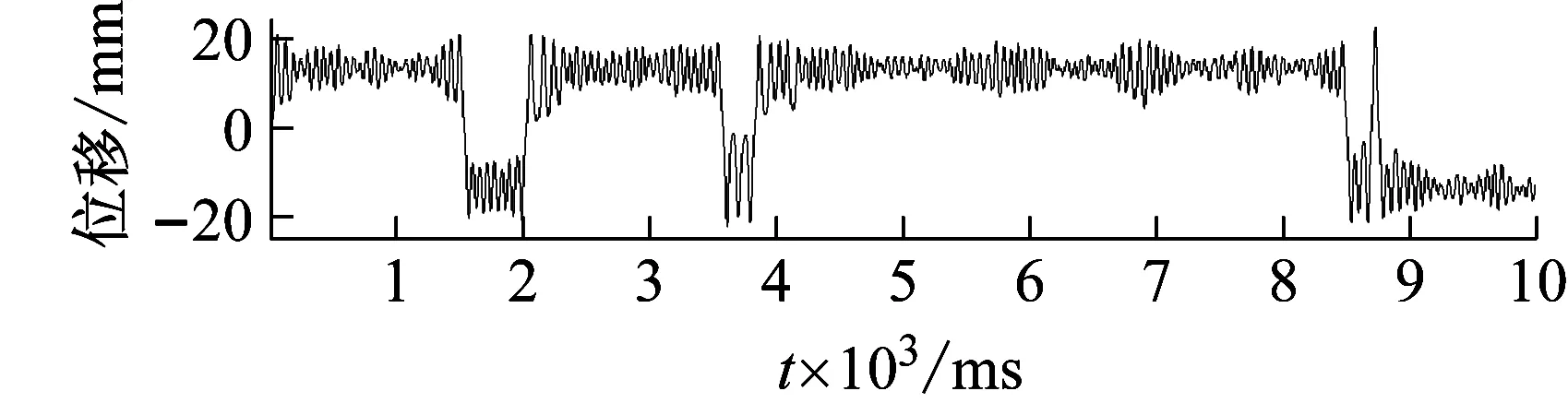
当实验磁铁间距d0=28 mm时,末端磁铁A的位移响应近似双稳状态,如图13所示。图14(a) 、(b)是末端磁铁A的位移响应波形及其速度波形,该速度波形由位移波形数据的一次差分得到。实验采集的线圈感应电动势如图14(c)。由图14(b)和(c) 可知,线圈感应电动势的大小与磁铁A在x轴方向上的速度的变化趋势保持一致,也表明与线圈垂直面的磁场强度变化的快慢成正比,这种结果与图9的模拟结果一致。在表2几何尺寸结构下,仅40匝线圈绕组产生系统感应电动势的有效值即可达到1.1 mV,当负载R为200 Ω时,其功率为6.05×10-6mW。

图13 末端磁铁A的相图

(a) 位移

(b) 速度
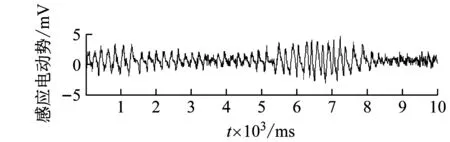
(c) 线圈感应电动势
Fig.14 The experimental data of the center point of magnet A inxdirection, displacement,velocity and induced voltage
将实验位移响应数据代入式(16)进行模拟计算,得到线圈实际振动响应数据的感应电动势模拟曲线,如图15所示。比较图14(c)和图15可知,实验与模拟得到的两感应电动势曲线的变化趋势完全一致,仿真感应电动势有效值为1.05 mV,与实际测得感应电动势相符,表明上述非线性磁力和磁场的分析以及悬臂梁动态响应和感应电动势的计算是合理正确的,这种研究方法可有效预测评估双稳悬臂梁电磁式振动能量采集器的感应电动势。
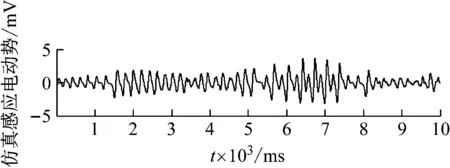
图15 实验数据的模拟感应电动势
6 结 论
本文设计了一种双磁铁非线性双稳悬臂梁电磁式振动能量采集器,通过数值模拟和实验验证得出的结论是:
(1) 将悬臂梁形状修正函数、磁化电流理论引入动力学方程计算,得到了更精确的双稳响应位移和感应电动势的模拟结果。
(2) 为了计算固定线圈绕组相对运动磁铁坐标系的坐标,以运动的悬臂梁末端磁铁中心为原点建立相对坐标系,采用坐标平移和旋转方法,得到了线圈绕组的绝对坐标值。
(3) 线圈感应电动势的变化趋势与悬臂梁末端磁铁速度的变化趋势保持一致,表明线圈感应电动势与线圈垂直面的磁场强度变化率成正比。
(4) 以实验数据为基准的感应电动势模拟计算结果,证明了本文非线性磁力和磁场的分析以及悬臂梁动态响应和感应电动势的计算是合理正确的,为双稳悬臂梁电磁式振动能量采集器的感应电动势的有效预测评估提供了可行的研究方法。
