VR技术在采摘机器人仿真系统中的应用研究
2019-12-22李敏
李 敏
(绵阳职业技术学院 计算机科学系, 四川 绵阳 621000)
0 引言
VR虚拟现实技术具有多感知性、存在感、交互性和自主性等重要特征,主要包括感知、自然技能、仿真模型及传感技术等,能够依据计算机和图像技术,虚拟出如同真实环境的模式世界。本文基于VR虚拟现实技术,采用MatLab软件搭建了采摘机器人虚拟样机,并结合Novint Falcon控制器,实现了对虚拟机器人的控制。
1 VR虚拟现实概述
VR(Virtual Reality)虚拟现实技术是以计算机为核心,结合网络技术、图像仿真、人机接口、模式识别、传感器、AI、自动控制,以及远程操作等技术,将抽象模糊的信息处理为与某一特定真实环境在听、看、闻、感等方面完全相似的模拟环境,用户借助人机交互设备控制模拟环境中的对象,让用户身临其境,实时感受模拟环境中的三维世界。
虚拟现实系统包括信息输入和输出反馈两部分。输入设备是数据手套、游戏手柄、键盘、鼠标、数据衣等;输出反馈是BOOM显示器、头盔显示器或液晶显示屏等。用户用过输入等传感设备直接对虚拟环境进行操控,并得到实时的三维显示以及力和触觉等反馈。当虚拟现实系统与外部世界通过传感设备组成一个闭环控制系统时,用户在与虚拟模型的交互中,实现对外部世界的操控。虚拟现实系统模型如图1所示。

图1 虚拟现实系统模型
虚拟现实系统主要由检测、反馈、传感器、控制、3D模型和建模模块等6部分组成,如图2所示。
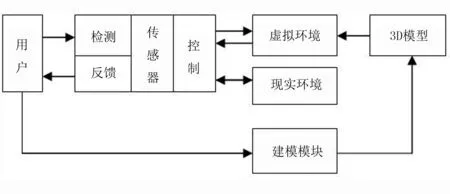
图2 模拟现实系统组成框架图
检测模块的作用是检测用户传递的操作指令,然后传递给控制模块,由其控制传感器模块作用于虚拟环境。反馈模块的作用是实时监测传感器模块的工作状态信息,为用户提供反馈信息,方便用户下一步操控。传感器模块的作用是:①接收用户传递的操作指令,经过数据处理后传递给控制模块;②将实时工作状态反馈给用户。控制模块的作用是根据监测模块的信息,控制传感器作用于用户、虚拟环境和现实世界之间。建模模块的作用是根据现实环境和对象信息,搭建三维的虚拟环境。
2 采摘机器人运动学分析
本文研究的采摘机器人是一5个自由度的多关节机器人,由主动力臂、大臂、小臂、手腕和机械手组成,每个自由度都是转动关节,各个关节串联而成。其中,采摘机器人主动力臂的轴线为垂直于地面方向;大、小臂和手腕为轴线水平方向,相互之间呈平行关系。采摘机器人通过关节间的5个转轴实现对机械手的操控,从而实现对目标果实的采摘作业。在关节系统中,主动力臂、大臂和小臂组成主连杆系统,用来控制末端执行器的空间位置;手腕用来控制采摘机器手的方向;机械手则用来实现抓取和放置动作。采摘机器人结构示意如图3所示。
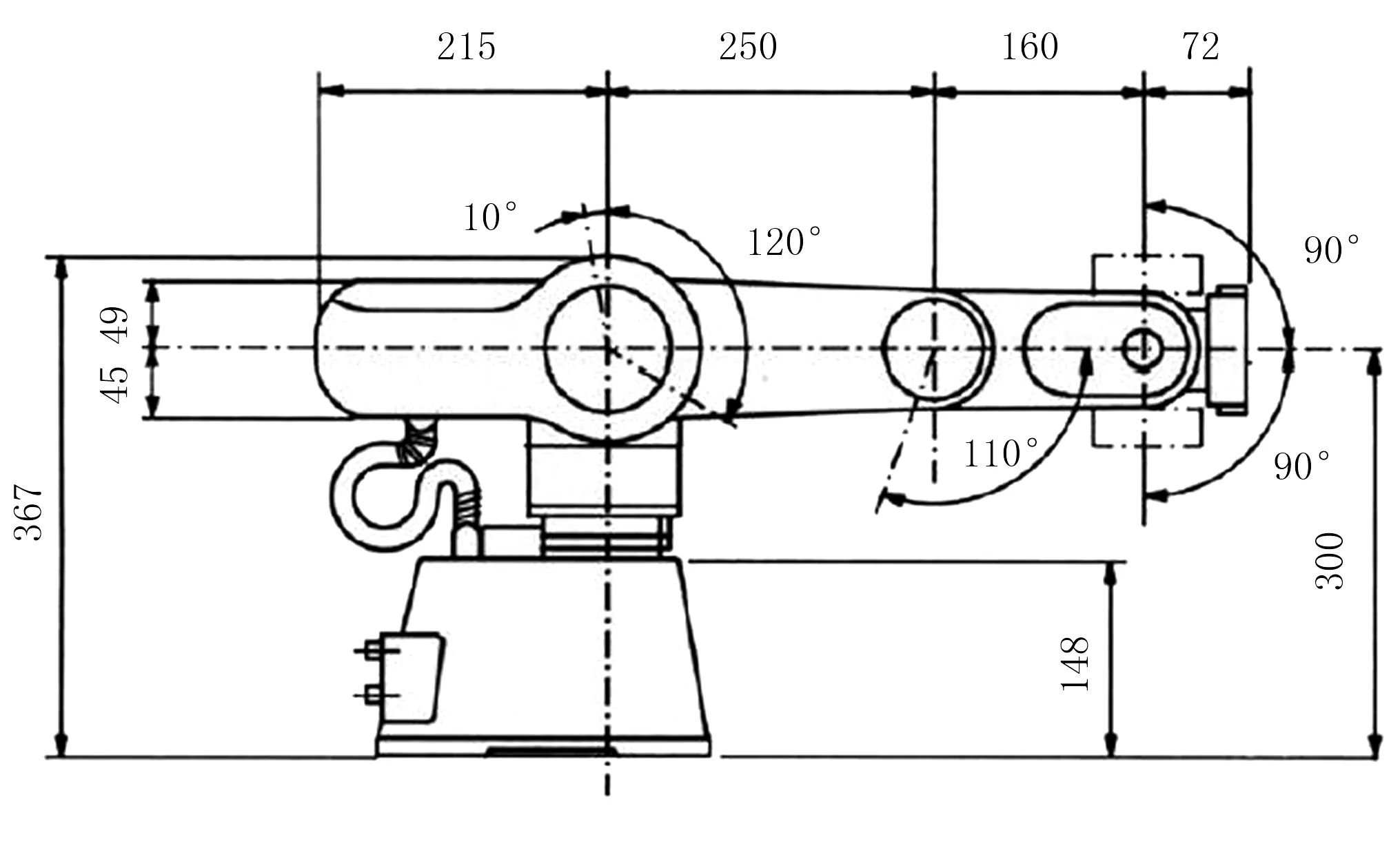
图3 采摘机器人结构示意图
采摘机器人5个自由度关节组建成了一个运动链,每个连杆连接两个相邻的关节,每个关节连接两个相邻的连杆,一旦某一连杆的一组任务完成,就会决定机器人从这一关节体到下一个关节体的转换。如果所有连杆(0到n)完成转换,则可以确定整个采摘机器人变换矩阵为0An。
机器人两相邻连杆n-1与n之间的相对关系的运动方式为:①每个连杆的局部参考帧可以通过指定的Z轴和X轴确定;②旋转关节将围绕Z轴旋转,而棱柱关节将沿着Z轴平移;③X轴沿着两个相邻连续Z轴的公共法线;④Y轴则是另外两个轴的向量之积。
为了表示采摘机器人各个关节运动过程中的位移与速度参数关系,采用DH模型建立机器人运动学方程,并建立如图4所示的采摘机器人连杆坐标系。采摘机器人各连杆参数如表1所示。
从图4和表1可以看出:本文建立了机器人DH参数,确定了采摘机器人各连杆之间如变量θn、扭角αn、连杆参数an,以及距离dn等参数信息。其中,参数αn、an和dn是固定的,而θn是可变的。

图4 采摘机器人连杆坐标系图

连杆n变量θn扭角αn/(°)连杆参数an/mm距离dn/mm1θ19001522θ2025003θ3016004θ49072050θ51070
每个连杆的臂矩阵可以表示为
(1)
其中,C1=cosθ1,S1=sinθ1,C23=cos(θ2+θ3),S23=sin(θ2+θ3),C234=cos(θ2+θ3+θ4),S234=sin(θ2+θ3+θ4)。
式(1)可以转换为
pn-1=n-1Anpn
(2)
利用式(2),采摘机器人机械手的位姿可以用以下齐次矩阵表示,即
(3)
采摘机器人的逆运动学可以分为两个过程,假设连杆1的旋转角度(θ1:机器人主动力臂的旋转角度)是主动力臂电机必须沿着需要方向移动的角度。采摘机器人逆运动示意如图5所示。
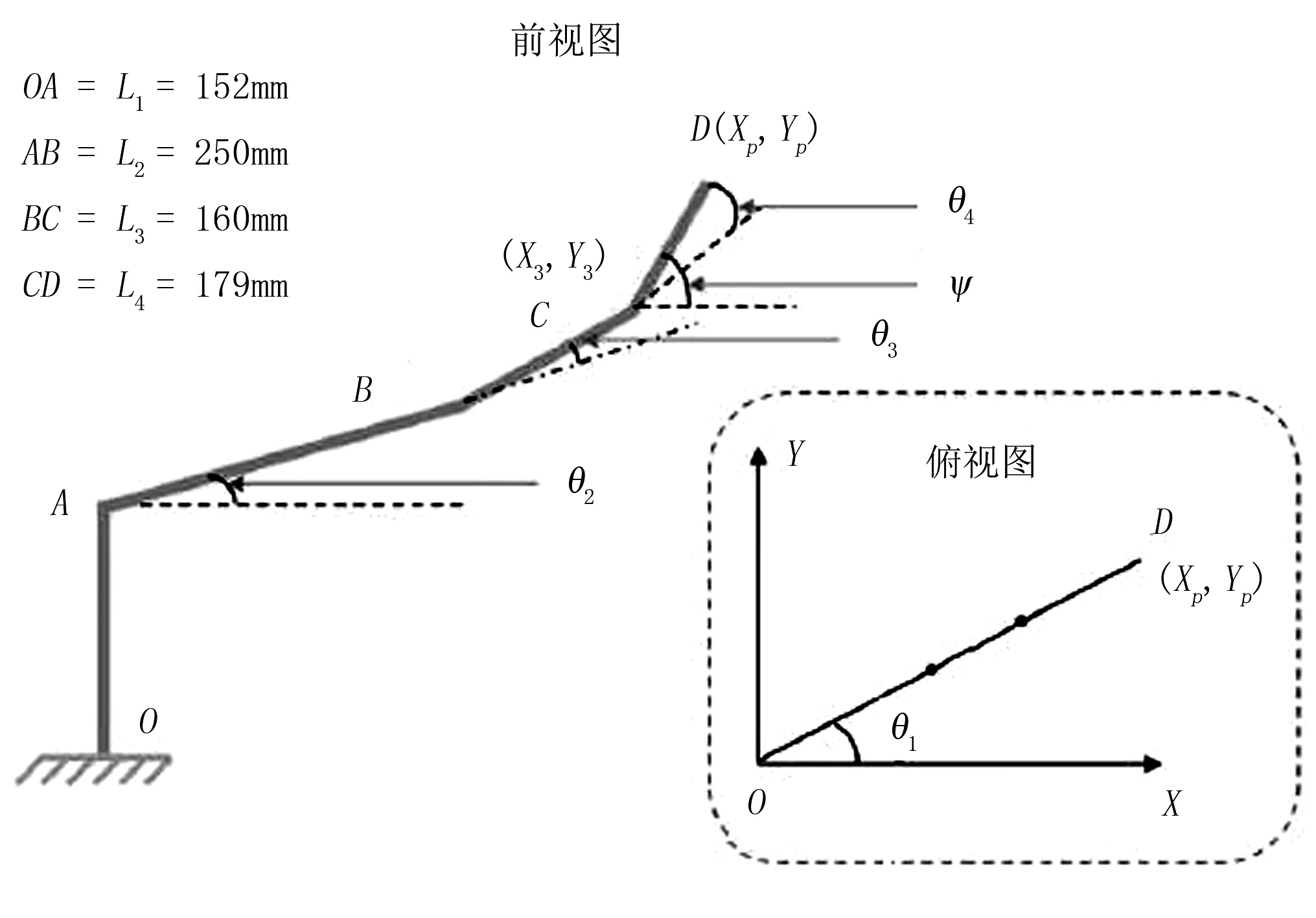
图5 采摘机器人逆运动示意图(前视图和俯视图)
图5中,O为原点,A为肩关节,B为肘关节,C为手腕,D为机械手;点p是采摘机器人的机械手,手腕和机械手在一个平面内,θ2、θ3和θ4可以确定三维平面内机械手的姿态;x、xp和yp之间的关系可以表示为
x=[(xp)2+(yp)2]1/2
(4)
θ1的计算式为
θ1=arctan(yp/xp)
(5)
为了计算方便,将图5简化为如图6所示的逆运动位姿示意图。

图6 采摘机器人逆运动示意简化图
如图6所示,β=α+θ2,p点坐标方程为
(6)
当采摘机械手末端位置被确定时,x、zp和ψ也将会被确定。其中,ψ为采摘机器人手腕的方位角。C(x3,z3)的位置可以通过以下等式计算出,即
(7)
确定关节4的位置后,θ2和θ3可以由两个自由度机械手确定,式(7)可以化简为
(8)
由式(8)可以求出θ2和θ3,又因为β=α+θ2,Ψ=(θ2+θ3+θ4),且有
(9)
那么θ4可以通过下式计算出,即
θ4=ψ-(θ2+θ3)
(10)
式(8) ~式(10)就是采摘机器人的逆运动学方程。
3 建立采摘机器人仿真平台
3.1 采摘机器人仿真平台结构
采摘机器人临场感仿真平台由硬件和软件两部分构成,该仿真平台结构如图7所示。
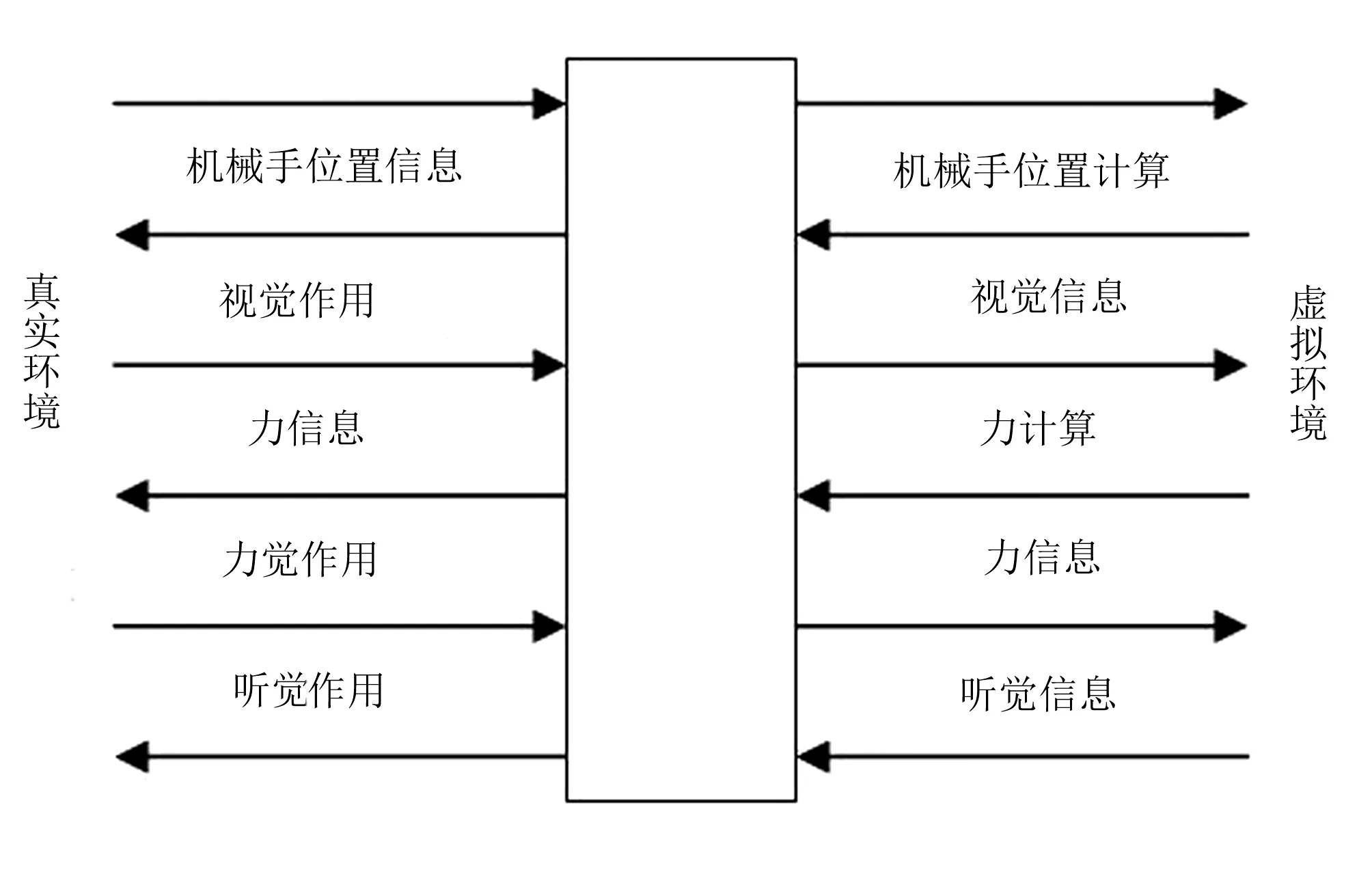
图7 采摘机器人仿真平台结构框架
采摘机器人仿真平台硬件系统由Novint Falcon、PC机以及键鼠组成。其中,Novint Falcon是一种全新型的控制器,替代了传统的鼠标和操纵杆,使用该设备能够体验不同以往的三维空间的力反馈,赋予虚拟物品和环境真实的感觉。
采摘机器人仿真平台软件系统主要功能包括人手运动检测、运动跟踪计算、碰撞检测、机械手动作解析、目标获取、虚拟接触力和3D图形显示及力反馈等。该仿真平台软件系统框架如图8所示。
以上功能模块主要是采用3D仿真、模式识别和运动跟踪等VR虚拟现实技术,结合机器人运动学,计算虚拟环境中的机器人与运动映射点的实时状态,控制机械手的运动轨迹规划,并通过3D图形显示及力反馈进行信息反馈。

图8 仿真平台软件系统框架图
3.2 采摘机器人虚拟操作
采摘机器人仿真平台主要功能是通过在虚拟环境中对机械手的虚拟操作,获取运动映射及力映射模块的参数信息,从而了解机器人的运动轨迹规划及生成、关节空间和操作空间中的运动边界条件,为虚拟操作模块通过运动映射点操作机械手使其任意采摘作业,并实时计算机械手以及目标果实的位置坐标。通过仿真平台可为实际研究采摘机器人正逆运动学提供参考。采摘机器人虚拟操作场景如图9所示。

图9 采摘机器人虚拟操作场景
采用Novint Falcon作为人机交互设备,实时获取三维模型中虚拟采摘机器人运动姿态信息,可以实时观察运动映射点和机械手在虚拟空间中的运动,为研究采摘机器人正逆运动学提供理论参考。
4 实验与结果分析
为了验证采摘机器人仿真系统的可行性,采用MatLab构建其虚拟样机,通过Novint Falcon人机交互设备采集人手的运动,从而控制虚拟环境中的虚拟机器人进行采摘、放置等操作。实验中,在MatLab界面中输入“正向和逆向”,调用机械手的前向和反向运动学模拟。在前进运动的操作界面中,输入参数由操作者确定需要移动的关节角度,而软件则计算出机械手最终的位置方向;在逆向运动操作界面中,输入参数必须由操作者移动的位置来确定,而软件自动计算机械手应该移动的位置。逆向运动模拟操作仿真轨迹如图10所示。
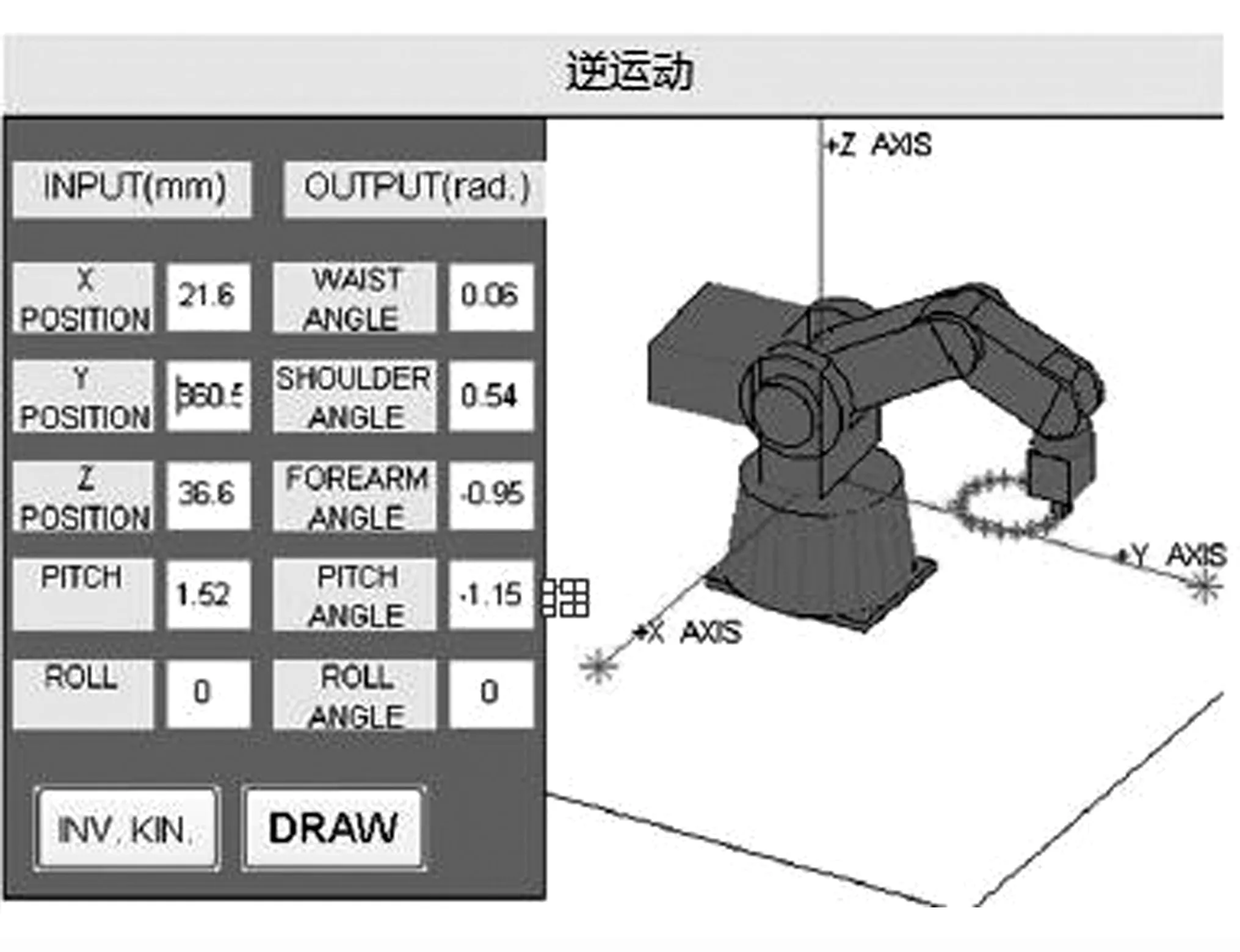
图10 逆向运动模拟操作仿真轨迹
如图10所示:采摘机械手精确地执行了圆形轨迹的运动模拟,实现了逆向运动学计算与仿真。从仿真结果可以看出:采摘机械手在模拟运动中,位移和加速度比较稳定,较大程度地减少了关节依次驱动的突变加速度,使得采摘机器人整体运行平稳度较高。
5 结论
介绍了VR虚拟现实技术的概念和特点,分析了采摘机器人正、逆运动学,并介绍了逆运动求解过程;最后,从硬件和软件两部分介绍了采摘机器人仿真平台,实现了采摘机器人的虚拟操作。仿真结果表明:采摘机械手精确地执行了圆形轨迹的运动模拟,实现了逆向运动学计算与仿真,对研究采摘机器人正、逆运动学具有一定参考意义。
