三七收获机组合式挖掘铲减阻效果研究—基于EDEM
2019-12-22程一启张兆国崔振猛杨海慧
程一启,张兆国,张 丹,崔振猛,杨海慧
(1.昆明理工大学 现代农业工程学院,昆明 650500;2.云南省高校中药材机械化工程研究中心,昆明 650500)
0 引言
三七是药食同源的名贵中药材,是云南省独具有特色的中药材。云南中药材资源丰富,约有6 000多个品种。近年来,三七产业蓬勃发展,在中药材中逐步发展为领军药材,其加工产业和种植收入都占到全省40%左右的份额[1]。现代临床医学研究发现,三七对心脑血管系统疾病防治有很好的效果,具有强心健身、活血散瘀和强壮滋补等功效[2]。随着国家实施西部大开发、云南建设绿色经济强省战略及国家中药现代化建设项目实施,云南省三七产业得到快速发展,其种植面积和产量逐年增加。目前,三七的大部分采挖仍使用传统的人工采挖方式,采挖效率低下,劳动强度很大,费时费力[3]。
挖掘铲作为三七收获机的关键部件,其形态结构、几何参数将直接影响机械性能及收获效果。挖掘作为收获最重要的一步,必须满足较高的收获效率与较低的收获阻力。因此,在不降低三七收获率的前提下对三七收获机组合式挖掘铲减阻机理进行研究,对三七收获机降低收收获阻力、减少工作能耗具有重要的意义。
1 结构方案设计
1.1 三七种植模式
三七主要在土质疏松、排灌方便、保湿且8年内未种过三七的土壤中种植。三七保湿采用畦作,畦高100~160mm,总畦高1 200~1 700mm, 行距100mm,株距140~150mm。普通三七的生长深度150mm,最大生长深度200mm,如图1所示。
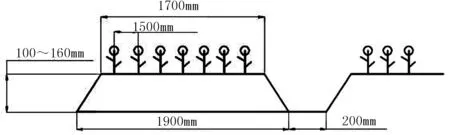
图1 三七种植模式示意图
1.2 组合式挖掘铲的设计
目前,挖掘铲铲形可以分为平面铲和曲面铲。其中,平面铲包括三角铲和条形铲,曲面铲包括凹面铲和凸面铲。目前,应用最广为多面二阶平面铲,收获效率较高,遗漏现象较少,入土比较容易。试验表明:如果三七收获机整个挖掘铲直接采用二阶平面且正对三七块根的采挖方式[4],则存在以下弊端(见图2):①容易漏挖一些不在标准位置生长的三七; ②二阶平面铲见铲架的迎土面会与土壤产生较大的阻力。
为了克服这些弊端,可在两个二阶平面铲间加入另外一种铲。目前常用的做法是再加一个二阶平面铲,但新加的平面铲几乎很少收获到三七,且会增加整机挖掘阻力。故本设计在二阶平面铲间加入一种土壤破碎铲,成为一种组合式挖掘铲。
组合式挖掘铲由二阶平面铲、土壤破碎铲及铲架组成,如图3所示。二阶平面铲与土壤破碎铲交错排列,组合式挖掘铲工作时土壤破碎铲先行破土,又能推开土壤,迫使不在标准位置生长的三七移动到二阶平面铲所在位置,以提高收获率。
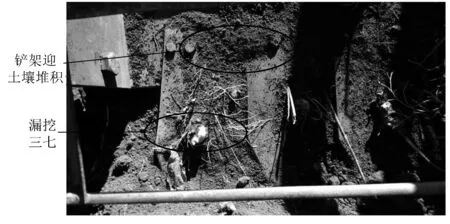
图2 多个二阶平面铲试验问题图
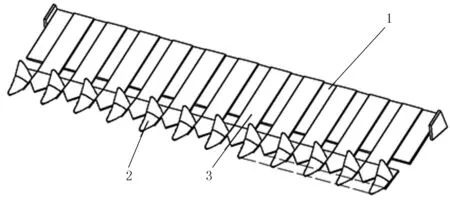
1.铲架 2.土壤破碎铲 3.二阶平面铲
1.2.1 二阶平面铲参数设计
二阶平面铲作为组合挖掘铲的主要工作部件,其主要参数包括铲面倾角α1与α2、铲体宽度b、铲体长度L1与L2,如图4所示。
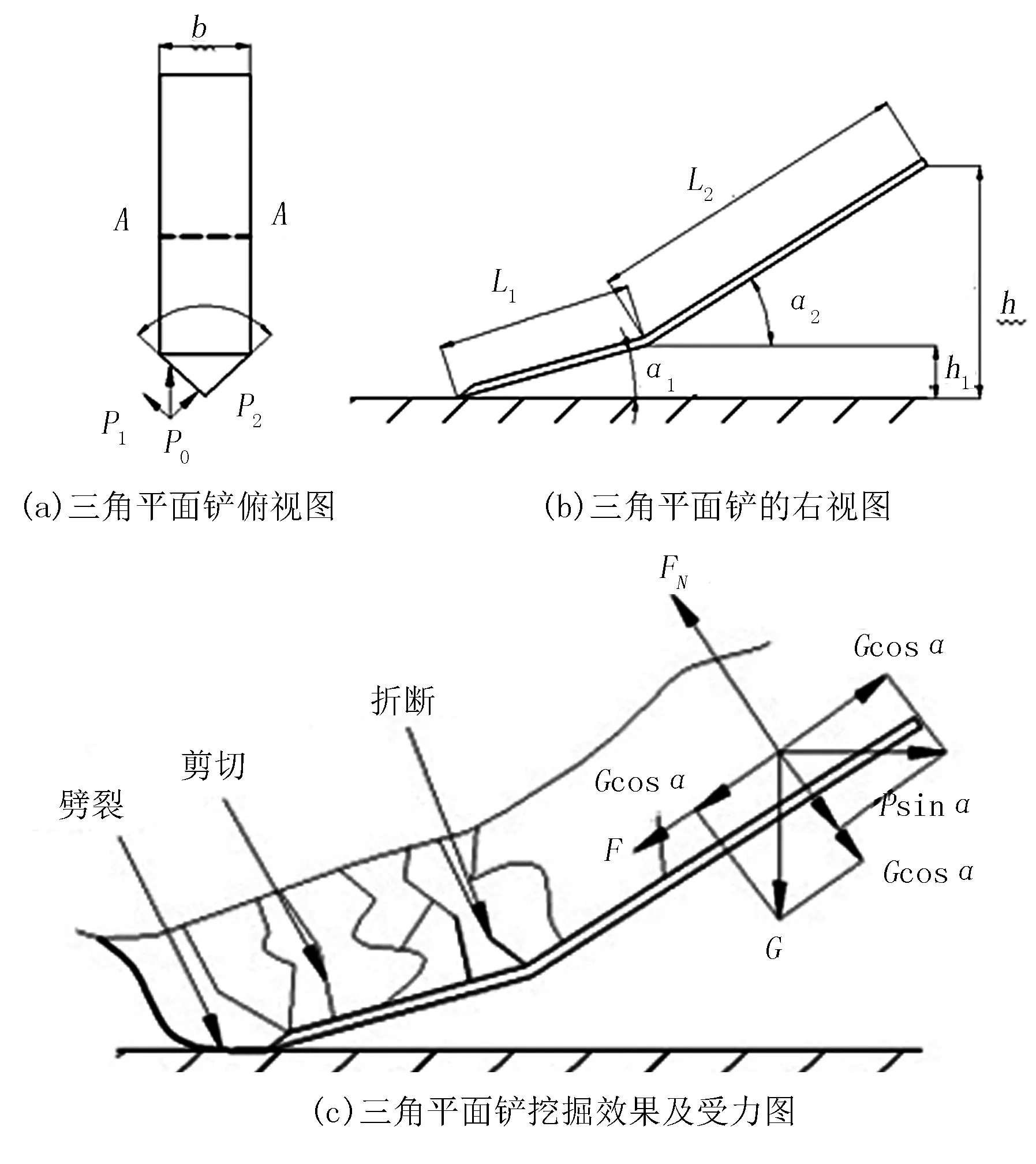
图4 三角平面铲的特性图
为使三七茎叶、杂草等杂物能沿铲刃边缘顺利地滑移且达到易切断、减小前进阻力的目的,需要满足下式,即
P1≥μP2
(1)
由摩擦定理可知
(2)
(3)
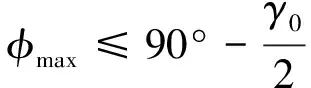
其中,草及土壤的总阻力为F,铲刃前进作用力为P0,茎秆和土壤对铲刃的摩擦系数为μ。式(1)~式(3)中:φmax为茎叶、杂草和土壤对钢的最大摩擦角,土壤对钢的摩擦因数为0.577~0.721,茎叶对钢的摩擦因数为0.95~0.98,故只要满足茎叶对钢的摩檫系数即可。计算得γ0<120°,可满足要求。本设计采用γ0=90°。
Pcosα2-F-Gsinα2=0
(4)
FN-Gcosα2-Psinα2=0
(5)
F=μFN
(6)
(7)
其中,P为掘起物的移动力;α2为第2阶铲面倾角;G为掘起物的重力;F为土壤与铲的摩擦力;FN为挖掘铲对掘起物的支反力;μ为土壤对挖掘铲的摩擦因数。一阶铲面倾角α1必须小于二阶铲面倾角α2,为保证有较好的碎土能力及挖掘阻力不能过大,两个铲面的倾角值不宜过大或过小。故取15°≤α1≤20°,18°≤α2≤25°,且α1<α2[5]。
为能将三七完全挖出,同时不损坏三七,且可使掘起物顺利输送到后续装置上,避免土壤堆积,挖掘深度取150~200mm,h1取总高度h的1/5~1/4,即可满足要求。又根据式(8)并参考其他根茎类的挖掘铲,取总长L约为400mm。
(6)
本设计中采用二阶平面铲正对三七块根的采挖方式,即平面铲的行进方向与三七块根的生长方向平行[5]。宽度要能将1株最大尺寸的三七完整的挖出,因此取铲宽b=90mm。
1.2.2 土壤破碎铲参数设计
土壤破碎铲有着降低挖掘阻力、辅助二阶平面铲三七块根的功能,如图5所示。土壤破碎铲为三棱楔[6],其主要参数有入土隙角β0、入土角β、铲胸升角β1、翻土角β2、铲翼宽c。
入土隙角β0为土壤破碎铲底面与地面之间的夹角,有利于土壤破碎铲入土。入土隙角在5°~15°范围内可满足工作要求。
入土角为破碎铲工作面与地面之间的夹角。本文入土角的设计与圆弧刃口型开沟器刃口相似,为圆弧设计。为方便确定入土角与铲胸升角参数的最小值,取入土隙角β0=5°,其关系与范围为25°≤β≤β1≤65°,如图6所示。
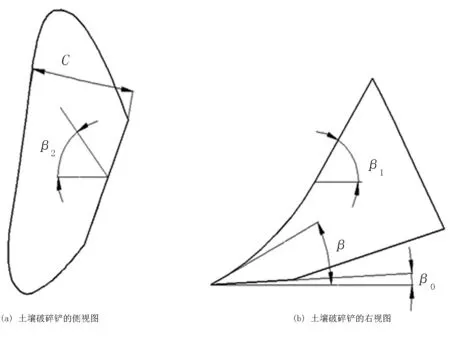
图5 土壤破碎铲的结构简图
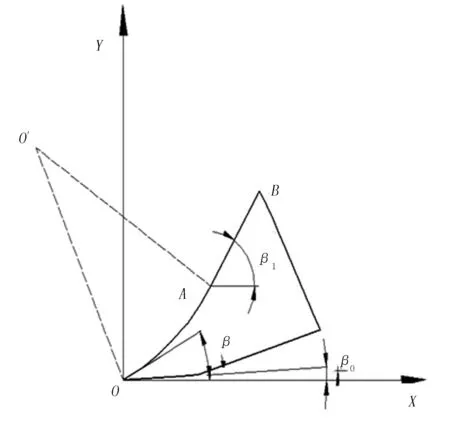
图6 入土角与铲胸升角的示意图
假设O为坐标原点,A点的纵坐标为入土角变化为铲胸升角的临界高度值,其大小约为三七主根系在土壤中所占高度,取值50mm;A点横坐标取值不能使β1大于65°,拟取值60mm。故弧线上两点坐标为O(0,0),A(60,50)。因此,假设OA圆弧线的方程为
(7)
其中,a、b为圆心O′的横纵坐标;R为圆半径(mm)。将O、A两点坐标带入上式,取初始入土角β=25°,则
y′(0)=tanβ=tan25°
(8)
在OA圆弧又有以下关系式,即
(9)
由式(9)可得β1=55°,满足要求。最小入土角β与最小铲胸升角β1分别为25°和55°。
本设计是通过土壤破碎铲向两侧推三七与土壤混合物的功能将三七推至二阶平面铲挖掘范围,故翻土角应取较大值。为避免土层混乱,β2不会超过42°。为增加推土效果,则要大于这个值,β2取值约为50°。
土壤破碎铲位于二阶平面铲之间,铲翼宽应不大于二阶平面铲间的间隙,故取铲翼宽c=58mm。
2 组合式挖掘铲离散元仿真分析
2.1 边界模型的建立与参数选取
采用EDEM离散元仿真软件对组合式挖掘铲与土壤的接触作用力进行分析。由于组合式挖掘铲整体过大,对计算机配置要求过高,易导致仿真时间过长,故只选用其中关键部分进行仿真。本文采用Pro/E软件对组合式挖掘铲及与其对比仿真试验的挖掘铲进行三维建模,并以stp格式导出EDEM软件,如图7所示。

图7 仿真区域中两种挖掘铲三维模型
土壤是由气体、液体和固体组成的复杂物质,三七多种植于土质疏松的沙壤土中,本文选用经典的Herte-Mindin模型作为离散元法仿真时的土壤颗粒模型,仿真试验中组合式挖掘铲的材料采用65Mn。通过土壤物理性能参数和力学参数的测定[7],根据仿真中土壤颗粒分布情况、计算机的性能及土槽尺寸,采用如表1中的仿真参数。
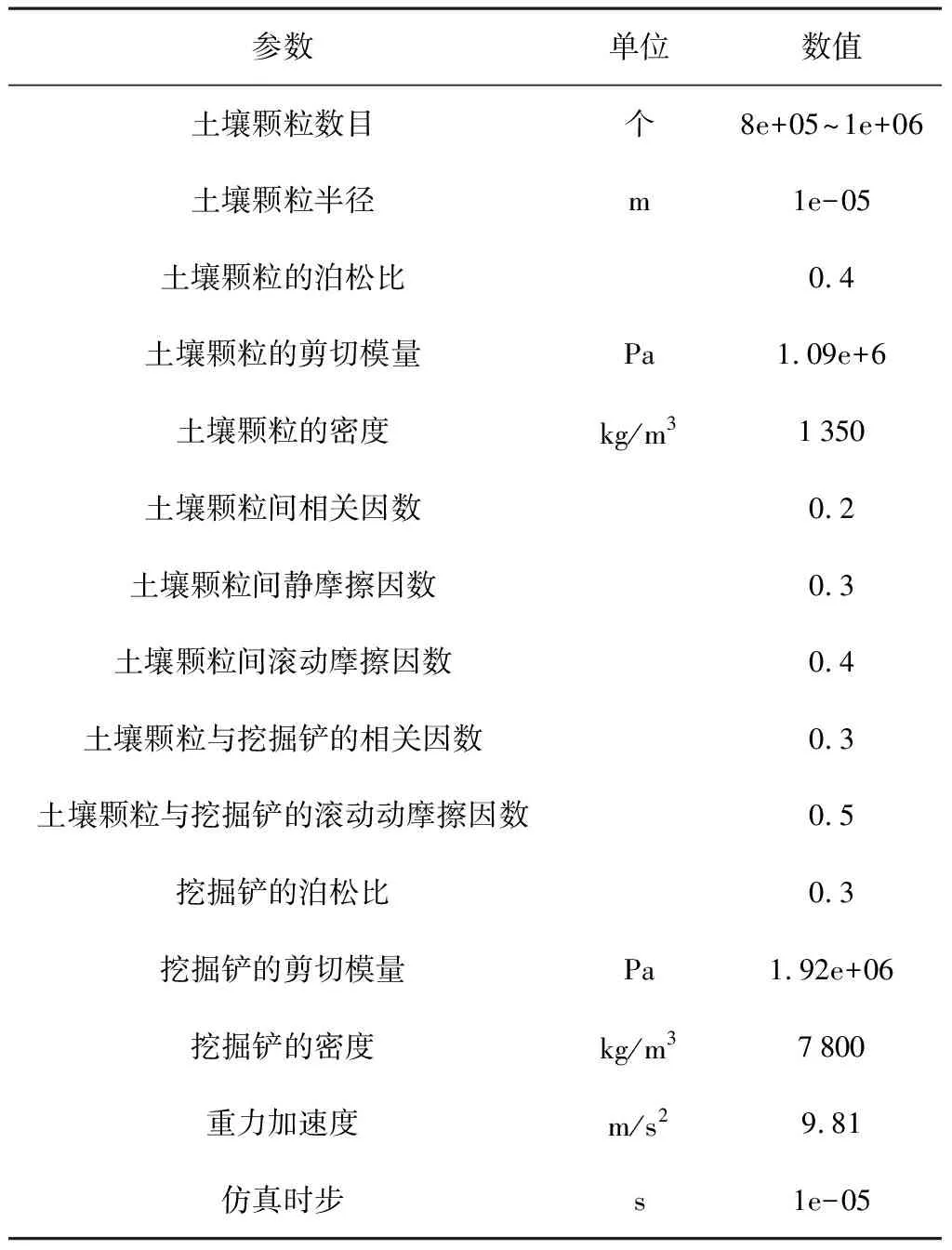
表1 离散元法仿真分析时的参数
2.2 工作阻力分析
仿真中采用1m×0.5m×0.5m的土槽,在EDEM前处理器模块依次设置全局模型参数,定义基本颗粒、几何结构及求解域,创建颗粒工厂等。仿真实验为单因素试验,需要对组合式挖掘铲以及对比挖掘出不同运动情况进行设置。仿真并分析工作速度分别为0.5、0.7、0.9m/s,挖掘深度为140、170、220mm。组合式挖掘铲与对比挖掘铲的仿真工作过程如图8所示。
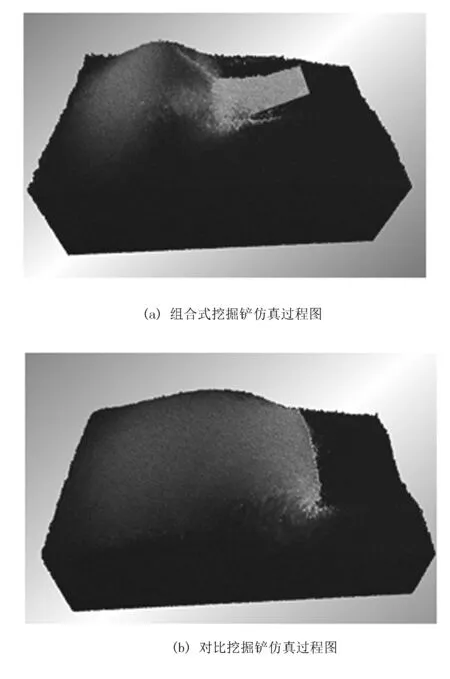
图8 组合式挖掘铲与对比挖掘铲EDEM离散元仿真分析
仿真开始时形成土壤颗粒,待颗粒沉淀稳定后组合式挖掘铲开始运动。组合式挖掘铲的挖掘阻力在工作过程中不断发生变化,趋于恒速稳定状态时段平均值为组合式挖掘铲的挖掘铲阻力。通过EDEM后处理工具模块对组合式挖掘铲与对比挖掘铲的仿真模拟结果进行分析与导出[8],仿真得到水平阻力和垂直阻力的变化,如图9所示。


图9 不同工作速度时组合式挖掘铲与对比挖掘铲工作阻力变化曲线
由图9可以看出:组合式挖掘铲在挖掘深度与速度相同的情况下,水平阻力和垂直阻力比值大小约5:2。对比挖掘铲在挖掘深度一定、速度较低的情况下,水平阻力略大于垂直阻力;随着速度的加大,水平阻力与垂直阻力的差值变大,但水平阻力与垂直阻力比值大小最大不多于5:4。
当挖掘深度相同时,速度越大,组合式挖掘铲与对比挖掘铲受到的水平阻力和垂直阻力越大。当挖掘深度和速度相同时,组合式挖掘铲水平阻力都略小于对比式挖掘铲,其垂直阻力却大大小于对比挖掘铲。
对比挖掘铲的工作阻力大特别是垂直阻力过大,主要原因是对比挖掘铲工作时挖起过多的土壤[见图9(b)][9]。对比挖掘铲铲面比组合式挖掘铲掘起更多的土壤,对铲面产生载荷和摩擦力,使工作阻力增加;组合式挖掘铲减少挖掘土壤量,可达到减轻壅土长度及降低工作阻力的作用。
2.3 土壤颗粒运动轨迹分析
为了分析三七的行走轨迹,对组合式挖掘铲周围土壤颗粒的运动轨迹进行仿真,如图10所示。

图10 土壤颗粒运动轨迹图
为了缩短计算机运算时间,只对组合式挖掘铲开始运动时通过两个土壤破碎铲铲尖位置的土槽一垂直正方形切面上的土壤颗粒进行仿真。正方形长要大于土壤颗粒堆起的高度,宽不小于两个破碎铲铲尖的距离,故取a=400mm、b=150mm。土壤颗粒轨迹不同颜色表示不同的速度,位于组合式挖掘铲下方的土壤颗粒只有轻微扰动,正对二阶平面铲的土壤颗粒速度较快,与二阶平面铲和土壤破碎铲的两侧铲翼直接接触的土壤颗粒速度最快。组合式挖掘铲在前进时,两个土壤破碎铲与二阶平面铲间形成的通道迫使其中的大部分土壤向通道运动(即向二阶平面铲移动),佐证了土壤中的三七也会向二阶平面铲移动,使组合式挖掘铲可以收获不在标准位置生长的三七。
3 结论
1)为降低三七收获挖掘铲的工作阻力,设计了一种新型组合式挖掘铲,由二阶平面铲和土壤破碎铲交错排列组成。土壤破碎铲先进行土壤破碎,然后由二阶平面铲进行收获。
2)通过理论分析比较1个土壤破碎铲与1个二阶平面铲的工作阻力,分析得出组合式挖掘铲有一定的减阻效果。
3)采用EDEM离散元软件比较分析了组合式挖掘铲与传统挖掘铲在不同工作速度和挖掘深度时的水平阻力和垂直阻力,结果表明:组合式挖掘铲在工作速度为0.5、0.7、0.9m/s,挖掘深度分别为100、150、200mm时阻力均小于传统的挖掘铲,且组合式挖掘铲垂直阻力小于传统挖掘铲。