基于无迹变换强跟踪滤波的锂离子电池SOC估计
2019-12-20姚孟豪彭辅明郭孔辉
张 佩,姚孟豪,彭辅明,郭孔辉
(1.武汉理工大学 现代汽车零部件技术湖北省重点实验室,湖北 武汉 430070;2.武汉理工大学 汽车零部件技术湖北省协同创新中心,湖北 武汉 430070)
动力电池及与之匹配的电池管理系统是电动汽车的核心技术[1]。SOC(state of charge)估计是电池管理系统的关键技术之一,精确的估算动力电池SOC可提高电池工作效率,延长其使用寿命,保证其安全可靠运行,为整车能量管理提供依据等,因此电池SOC估计对于电池管理和整车能量管理具有重要意义[2-3]。
目前国内外学者已提出了多种锂离子电池SOC估计方法,主要可以分为安时积分法、开路电压法、智能估算法和基于模型的估算法。安时积分法是目前电池管理系统上应用最为广泛的一种SOC估计方法[4]。该方法需要精确的初始SOC值,而且会由于电流漂移而不断累积积分过程的误差。开路电压法基于开路电压和SOC之间的关系来估算SOC,但由于开路电压测试需要将电池静置一段时间,因此该方法不适合SOC的实时在线估计[5]。智能算法如人工神经网络[6],模糊逻辑[7]和支持向量机[8]也已被用于估计电池SOC,该类方法可用于所有类型的电池SOC估计,其估计精度主要依赖于训练数据的数量与质量,不利于SOC的在线实时估计。基于模型的估算方法具有在线估计与自修正等特点,成为目前学术界和工业界研究的热点[9-15]。该类方法基于电池模型建立电池的状态空间方程,再使用滤波器或观测器来估算或修正状态变量。目前应用较为广泛的滤波算法为卡尔曼滤波算法,卡尔曼滤波算法对电池模型精度要求较高,而锂离子电池又是复杂的时变非线性系统,因此应用传统的卡尔曼滤波算法估计电池SOC会产生较大的误差,一般需采用扩展卡尔曼滤波算法(extended kalman filter,EKF)。EKF估计电池SOC时需对锂离子电池状态空间进行线性化处理,降低了估计精度,增大了计算量,此外其计算过程均为矩阵运算,当系统电压、电流波动时会导致状态估计发散。为了解决上述问题,学者们提出了灰色扩展卡尔曼滤波[3],自适应卡尔曼滤波(adaptive kalman filter,AKF)[10-11],无迹卡尔曼滤波(unscented kalman filter,UKF)[12],Sigma点卡尔曼滤波[13],分数阶卡尔曼滤波[14],有限差分扩展卡尔曼滤波[15]等改进算法。这些改进算法与EKF算法相比具有较高的估计精度,但仍存在估计值发散的情况,而且都是基于卡尔曼滤波算法提出的,相比于EKF需增加额外的迭代算法,从而增加了系统设计的复杂性,不利于工程实现。
笔者针对以上锂离子电池SOC估计中存在的一些问题,提出了一种基于无迹变换强跟踪滤波器(unscented transformation strong tracking filter,UTSTF)的锂离子电池SOC估计方法。该算法在强跟踪滤波器(strong tracking filter,STF)的基础上引入无迹变换(unscented transformation,UT)来代替STF中雅可比矩阵的计算,继承了STF算法中在系统模型不确定时鲁棒性强的特点,同时又减少了计算量。首先建立了基于Thevenin等效电路的锂离子电池模型,并采用最小二乘法进行模型参数辨识,然后提出了针对该模型利用UTSTF算法进行电池SOC估计的流程和关键步骤,最后通过实验对比验证了该算法的估计精度和鲁棒性。
1 电池等效电路数学模型
目前常用的锂离子电池模型主要有等效电路模型和电化学模型[16-17]。电化学模型基于电化学理论采用数学方法描述电池内部的化学反应,能够全面描述电池的动态特性,但其计算量很大,且电池参数难以得到,因此较少应用到电动汽车仿真和建模中。等效电路模型采用理想电路元件(可控电压源、电阻、电容等)模拟电池动态工作特性,能对动态变化进行快速响应,结构简单,物理意义清晰,计算量小,易于实时实现,被广泛应用于基于模型的锂离子电池SOC估算。文献[17]比较了11种不同的等效电路模型在SOC估算中的稳定性、鲁棒性和精度表现,结果表明,Thevenin等效电路模型有最好的稳定性以及较好的精度表现。因此,笔者选择Thevenin等效电路模型进行SOC估算。
1.1 Thevenin等效电路模型
Thevenin等效电路模型如图1所示。图1中,R0为电池欧姆内阻,Rp,Cp分别为电池极化内阻和极化电容,UL为电池负载电压,Uoc为电池开路电压,i为电池负载电流,UP为RC网络间的极化电压。模型中用R0模拟突变的电阻特性,用Rp和Cp模拟电池的极化效应。
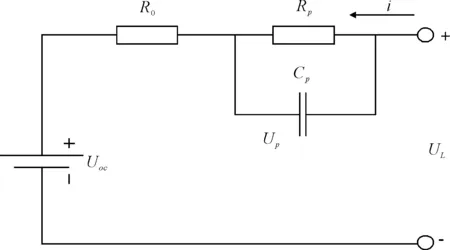
图1 Thevenin等效电路模型
该模型的离散状态空间方程如下:
(1)
UL,k=Up,k+R0Ik+Uoc(SOCk)+vk
(2)
式中:下标k为离散状态方程时刻;Up和SOC作为状态变量;I为控制变量;UL为观测变量;Ts为取样时间;CN为电池容量;η为库伦效率;w为系统噪声,v为观测噪声。
1.2 参数辨识
对上述模型来说,需要辨识的参数包括Cp、R0、Rp和Uoc与SOC的关系。在Cp、R0和Rp的辨识过程中还要考虑充放电方向的影响。
辨识实验根据复合脉冲功率实验(hybrid pulse power characteristic,HPPC)设计实验过程,实验过程中考虑电池充放电方向不同导致电池模型参数不同,HPPC实验方案设计如图2所示。
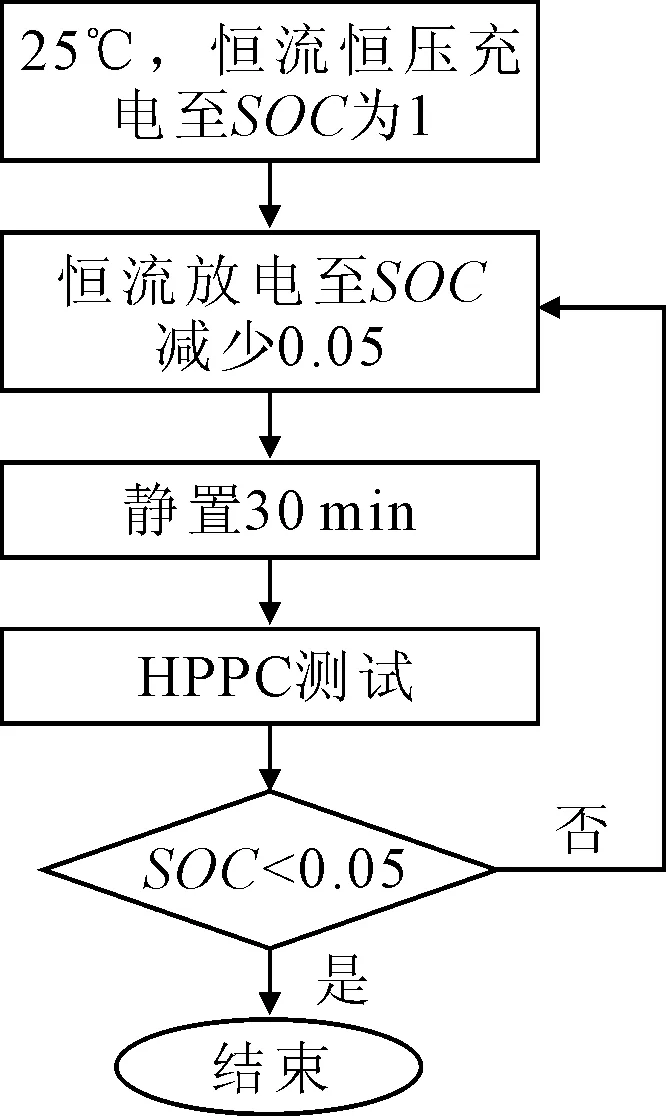
图2 参数辨识实验流程图
在充放电停止时刻,电池电压有一个瞬间的下降,这体现了电池的内阻特性,利用这个特性可以计算电池的放电内阻Rd和充电内阻Rc,计算公式如下:
(3)
(4)
式中:Δud为放电压降;Δid为放电电流;Δuc为充电压升;Δic为充电电流。
在Rp与Cp的辨识过程中,定义时间常数τ=RpCp,通过先辨识τ,再进一步辨识Rp和Cp。RC环节相当于一阶电路,式(5)与式(6)分别为模型的零输入响应和零状态响应:
up=up(0)e-t/τ
(5)
up=iRp(1-e-t/τ)
(6)
在HPPC循环实验中,充放电后静置40 s时电流为0,可以认为是零输入响应,根据此时的电压输出数据及式(5)进行非线性拟合辨识出时间常数τ。利用HPPC循环实验中的充放电过程辨识极化电阻,对于放电过程来说,由于放电开始前,电池已经静置了足够长的时间,可认为此时电池的极化效应已经消失,因此通过此时的电流、输出电压数据及式(6)辨识Rp。为简化辨识过程,充电过程的Rp与放电过程相同。对于极化电容Cp,根据τ=RpCp,可以由充放电的时间常数除以相对应的极化电阻值得到。最后根据最小二乘法的准则,对辨识得到的参数进行曲线拟合。
为了确定开路电压和SOC之间的关系,选择上述实验过程中放电后静置30 min后的电池电压作为开路电压,由此得到开路电压和SOC之间的关系,具体结果如图3所示。

图3 电池开路电压与SOC拟合曲线
从图3可知,SOC与开路电压的关系可以分成3部分,在曲线中段,开路电压变化较为平缓,而在两端开路电压变化较为明显,且在曲线后半段,SOC与开路电压之间呈现较为明显的线性关系。由此可将开路电压OCV(open circuit voltage)与SOC间的函数关系分成3部分,分别拟合曲线中3个部分的函数关系,并进行组合。表1显示了最终的拟合结果。
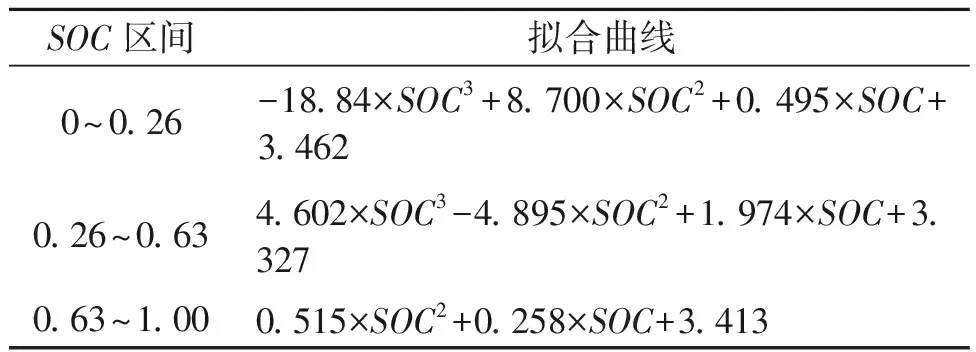
表1 SOC-OCV曲线拟合
2 基于UTSTF的SOC估算算法
2.1 UTSTF算法基本原理
EKF因其实现简单,收敛速度快等优点被广泛应用于各种非线性系统状态估计中。然而,EKF对模型精度有较高的要求,当模型精度不够时,会造成状态估计精度下降,甚至出现发散。STF通过在状态预测协方差矩阵Pk+1,k中引入渐消因子λ的方法,在线实时调整增益矩阵K,使得不同时刻的输出残差序列时时保持正交,这样STF在模型不确定时仍能保持对系统状态的跟踪能力。
UTSTF的基本思想是在STF的理论框架中引入UT变换的思想。UT变换的核心思想是用原状态的一些不变参数来近似某个高斯分布,即在原状态分布中按照某种规则进行采样,获得Sigma点,并保证采样点的均值和协方差近似等于原状态变量分布的均值和协方差。理论上已经证明,不论系统非线性程度如何,UT变换至少能以三阶泰勒精度逼近任何非线性高斯系统状态的后验均值和协方差,且无需计算非线性函数的雅可比矩阵,不要求非线性函数连续可微。
2.2 UTSTF算法实现
UTSTF算法实现流程如图4所示。

图4 UTSTF算法流程图
UTSTF的具体算法流程如下:
(2)根据获得的Sigma点进行预测更新得到xk,-,并计算量测协方差Pkl。

(4)计算渐消因子λ,并由此得到修正预测协方差矩阵Pk,-。
(5)利用xk,-和修正的协方差矩阵Pk,-按照对称采样策略更新Sigma点,并通过量测方程更新自协方差和互协方差矩阵。
(6)根据更新后的自协方差和互协方差矩阵计算滤波增益Ke,并修正状态量xk,+及协方差Pk。
(7)将更新后的Pk和xk,+代入步骤(1)中进行下一步滤波过程直到时间结束。
2.3 基于UTSTF算法的SOC估算
基于UTSTF的锂离子电池SOC估算系统框图如图5所示,主要包含两个部分:①离线处理部分,主要完成电池模型参数的辨识和滤波器的参数设置;②实时在线处理部分,主要根据电池实时监测数据和电池初始状态值进行电池状态观测,估计得到的xk+1即为电池的实时状态值,用其更新电池模型的参数,并作为电池初始状态值进行下一步的状态更新。

图5 基于UTSTF的锂离子电池SOC估算系统框图
3 实验验证分析
3.1 实验条件
实验数据通过动力电池测试平台获得,平台包含动力电池单体充/放电测试设备,恒湿恒温箱,测试电池单体和计算机。本文的实验对象为三星ICR18650-22FM电池,其额定容量为2.2 Ah,额定电压为3.6 V,充电截止电压为4.2 V,放电截止电压为2.75 V,测试环境如图6所示。基于MATLAB/Simulink搭建算法仿真模型,以验证算法在实际估算过程中的应用效果。算法模型的输入通过电池测试实验得到,包括测试中取样点的间隔,实时电流激励,电池端电压和SOC理论值。SOC理论值由电池测试设备记录的电池充放电安时值计算得到。模型的输出为SOC估算结果。为了验证算法在SOC估算环节的精确性和鲁棒性,采用1/3C恒流放电测试、复合脉冲功率测试和美国联邦城市运行工况(federal urban driving schedule,FUDS)测试对UTSTF,UKF,EKF 3种算法进行对比分析。
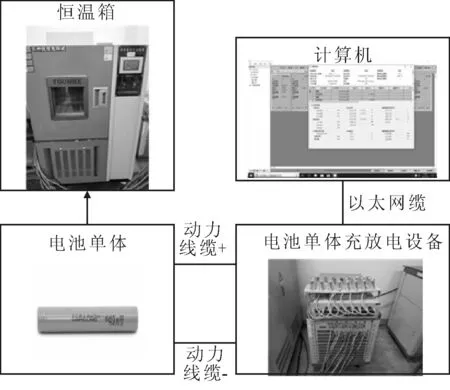
图6 测试设备结构框图
3.2 算法验证
3.2.1 1/3C恒流放电测试
在1/3C恒流放电测试中,将充满电的电池在25 ℃的室温条件下使用1/3C电流进行恒流放电测试,直到电池电压下降到截止电压2.75 V。设置采样间隔为10 s。系统噪声协方差和观测噪声协方差初始值设置如下:
Q=[0.01,0;0,0.1],R=0.1
图7和图8分别为恒流放电工况下SOC估算曲线和估算误差曲线。从图7和图8中可看出3种算法估计性能为:UTSTF>UKF>EKF,这主要是EKF的一阶泰勒级数展开在系统模型不确定时会造成很大误差,UKF以二阶泰勒级数展开的精度逼近任意非线性系统,而UTSTF在此基础上考虑了强跟踪因子,有更强的跟踪状态变量的能力。因此,UTSTF算法的可靠性和收敛性更好。

图7 恒流工况下SOC估算曲线
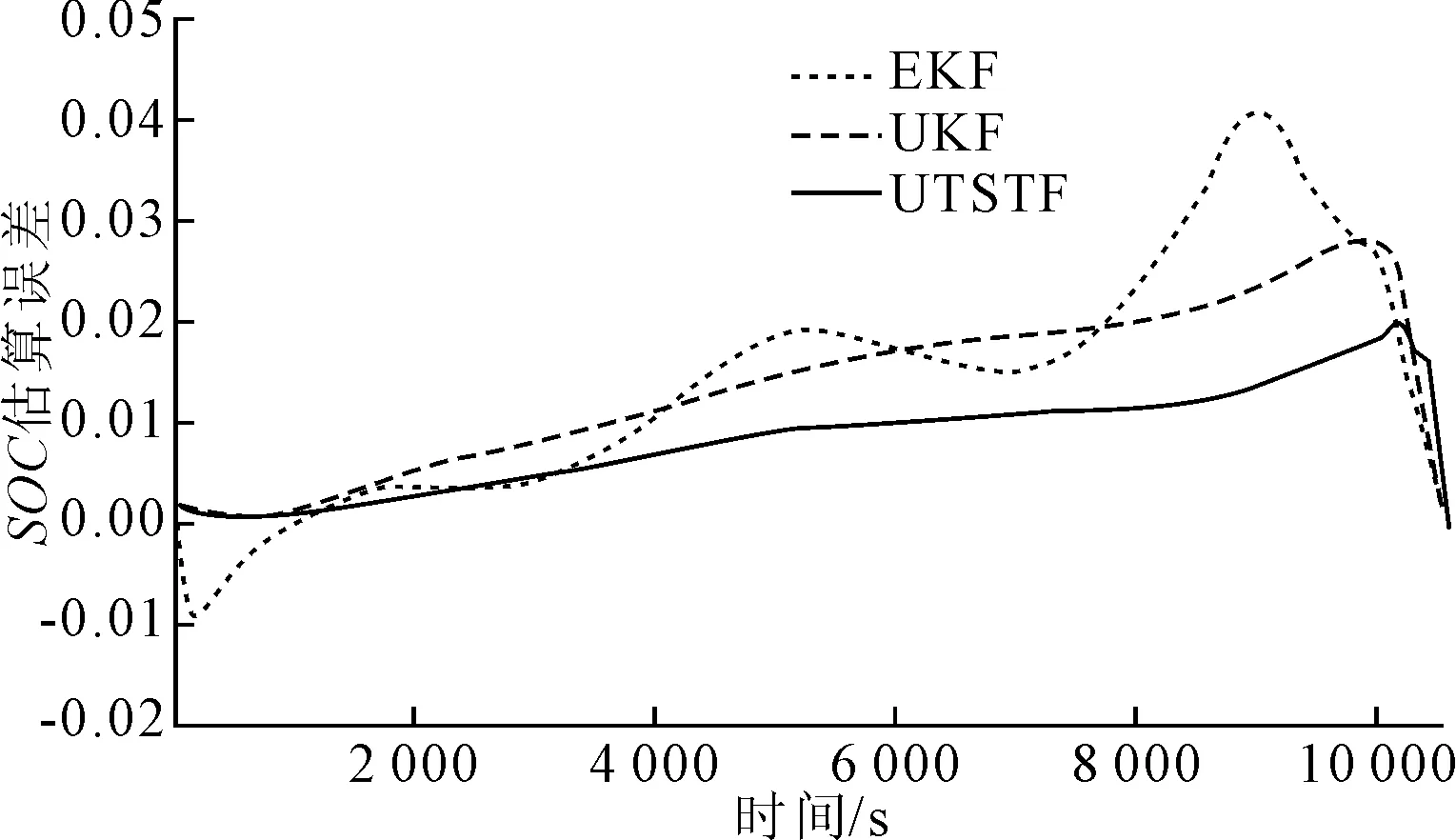
图8 恒流工况下SOC估算误差曲线
3.2.2 复合脉冲功率测试
为了进一步验证算法在变电流工况下的表现,将充满电的电池按照HPPC实验进行测试,激励变化与1.2中的HPPC实验相同,设置采样时间间隔为1 s。图9为在该测试条件下,3种算法的估算误差曲线。3种算法在估算过程中均出现了波动,在静置阶段,3种算法都有较好的跟踪效果,而从图9中可以看出在激励消失及突变阶段,EKF算法误差波动最大,UTSTF算法误差波动更小,能更好地跟踪SOC的变化趋势。
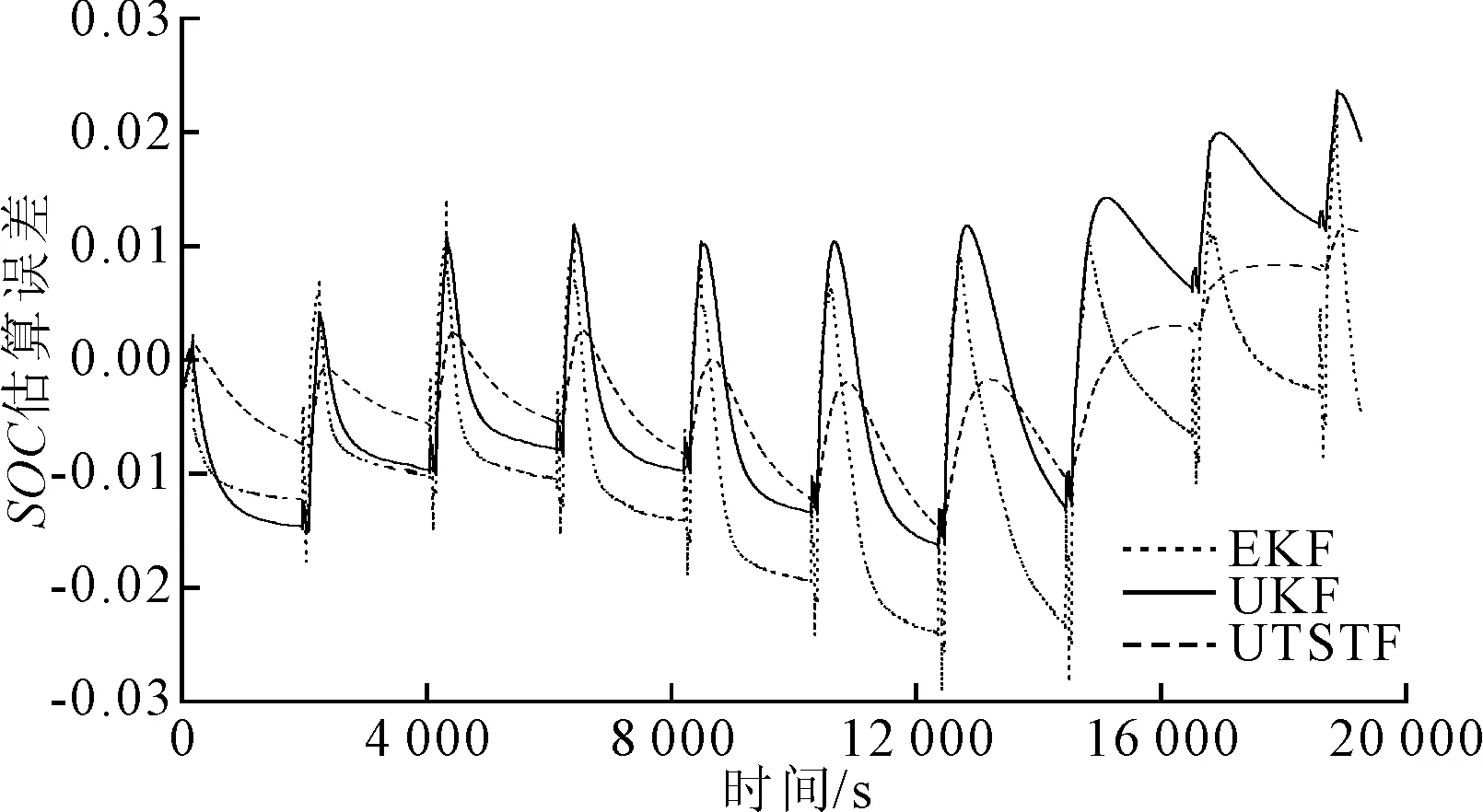
图9 HPPC测试条件下的SOC估算误差曲线
3.2.3 美国联邦城市运行工况测试
由于应用于电动汽车中的锂离子电池会经历剧烈的电流波动,因此笔者选取美国联邦城市驾驶工况对所提出的SOC估算算法进行了进一步的验证。系统噪声协方差和观测噪声协方差初始值设置与恒流放电工况相同。图10为FUDS工况下SOC估算误差曲线。从图10中可以看出在动态工况下,当激励发生突变或激励消失时,UTSTF和UKF算法的波动要明显小于EKF算法,且与理论曲线的趋势相近,而UTSTF相比于UKF更接近理论曲线,有更好的跟踪效果。

图10 FUDS工况下SOC估算误差曲线
表2为FUDS工况下各SOC估算算法的最大误差和均方根误差。从表2中可以看出采用UTSTF估算法的最大误差和均方根误差均小于采用UKF估算法和EKF估算法的最大误差和均方根误差,进一步说明UTSTF算法的估计精度要优于UKF和EKF。

表2 FUDS工况下SOC估算误差大小比较
4 结论
为提高锂离子电池SOC估计的精度和鲁棒性,基于锂离子电池一阶RC等效电路模型和模型参数辨识,构建了一种基于UTSTF算法的SOC估算模型。该算法在STF算法的基础上引入无迹变换,采用无迹变换来代替STF算法中雅可比矩阵的计算。相比于UKF算法,引入渐消因子来修正预测协方差矩阵,使该算法兼具STF算法的鲁棒性和无迹变换精度高和实现简单的优点。最后通过动力电池测试平台,进行了恒流放电、复合脉冲功率测试和FUDS工况测试,对比分析了EKF,UKF和UTSTF 3种算法的SOC估计性能,验证了UTSTF算法在电池SOC估计中具有精度高和鲁棒性强等优点。
