面向自动驾驶碾压作业车的障碍物检测研究
2019-12-20余升林王科未
邹 斌,余升林,王科未
(1.武汉理工大学 现代汽车零部件技术湖北省重点实验室,湖北 武汉 430070;2.武汉理工大学 汽车零部件技术湖北省协同创新中心,湖北 武汉 430070)
随着自动驾驶技术的迅猛发展,碾压作业车自动驾驶正成为当下研究的热点。与结构化的城市道路不同,碾压作业车的施工环境复杂,地面起伏,存在正障碍物(如行人与作业车辆)、负障碍物(如深坑)与坡道等障碍物。为实现碾压作业车自动驾驶过程中主动避开障碍物,需要对碾压作业面中各类障碍物进行准确的检测。
国内外诸多学者对障碍物检测进行了研究,主要是基于摄像头[1]和激光雷达[2]的方法。通过摄像头采集道路图像并分析道路图像的各项特征,检测出障碍物。Jia等[3]根据两连续帧之间运动特征差异,采用两连续帧(two consecutive frames,TCF)模型有效区分出障碍物与道路阴影及道路标志。Levi等[4]利用卷积神经网络对图像进行障碍物检测,该方法对结构化的道路环境检测效果较好,但对于复杂道路环境检测表现较差。摄像头采集图像信息,受光线影响较大。相比于摄像头而言,激光雷达不受光照条件影响,能实时检测车辆周围环境,对障碍物的检测更精确及可靠,因而激光雷达广泛用于障碍物检测[5]。于春和等[6]利用四线激光雷达进行非结构化道路的障碍物检测,先对激光雷达干扰数据进行滤波处理,后进行候选障碍点的提取及聚类分割等操作,试验结果表明,激光雷达能对一定坡度道路的障碍物进行有效检测。Morton等[7]采用激光雷达采集障碍物信息,分析障碍物的HLD(height length density)特征信息,通过预先训练好的分类器将凸凹障碍物进行有效分类,检测出障碍物。刘家银等[8]对非结构化环境下负障碍物检测问题,提出基于多激光雷达与组合特征的方法,对64线及32线激光雷达采集到的障碍物特征点信息,先采用贝叶斯法则进行融合,后采用DBSCAN(density based spatial clustering of applications with noise)进行聚类与过滤,最后进行栅格化检测出负障碍物。
综上所述,对非结构化环境下的障碍物检测,激光雷达优于摄像头,且当下鲜少有学者采用三维激光雷达面向自动驾驶碾压作业车进行障碍物检测研究。因此,为解决碾压作业面的障碍物检测问题,对某型号碾压作业车进行智能化改造,构建车辆障碍物检测平台。针对非结构化的碾压作业面环境,深入分析施工作业面障碍物的实际特点,采用D-S证据理论融合相对高度差、单线径向距离跳变、局部区域双梯度阈值等方法,对正障碍物、负障碍物和坡道进行检测。采用D-S证据融合检测方法,避免单一检测方法存在的弊端,有效提高碾压作业面障碍物检测的准确性。
1 车载激光雷达安装及标定
1.1 车载激光雷达安装
笔者采用Velodyne公司的VLP-16三维激光雷达。由于碾压作业车车身高度相对较高,且VLP-16激光雷达线束较少,若采用单激光雷达且水平安装于车顶,存在点云数据分布较稀疏,出现较大检测盲区。因此,为最大程度感知车辆周围环境,采用双激光雷达方案,将两激光雷达分别向下倾斜30°安装在车顶正前方与正后方(以车辆行进方向为前方)的固定支座上。
碾压作业车一般来回对施工面进行碾压作业,此工作特点决定了双激光雷达的安装方式与检测功能是相同的,为避免重复讨论,下面仅阐述车辆正前方的激光雷达。正前方激光雷达倾斜安装如图1所示。

图1 三维激光雷达安装
1.2 车载激光雷达标定
激光雷达的内参数一般在雷达出厂时已标定完成,故不用重复标定。对于外参数标定,主要获取激光雷达相对车辆的位置转换关系,即平移矩阵和旋转矩阵。激光雷达坐标系XLYLZL与车辆坐标系XVYVZV在三维空间中的几何位置关系如图2所示,ΔZ为两坐标系沿Z轴方向的纵向高度差,俯仰角β、侧倾角α、横摆角γ分别为两坐标系沿XL、YL、ZL轴方向的旋转角度偏差。
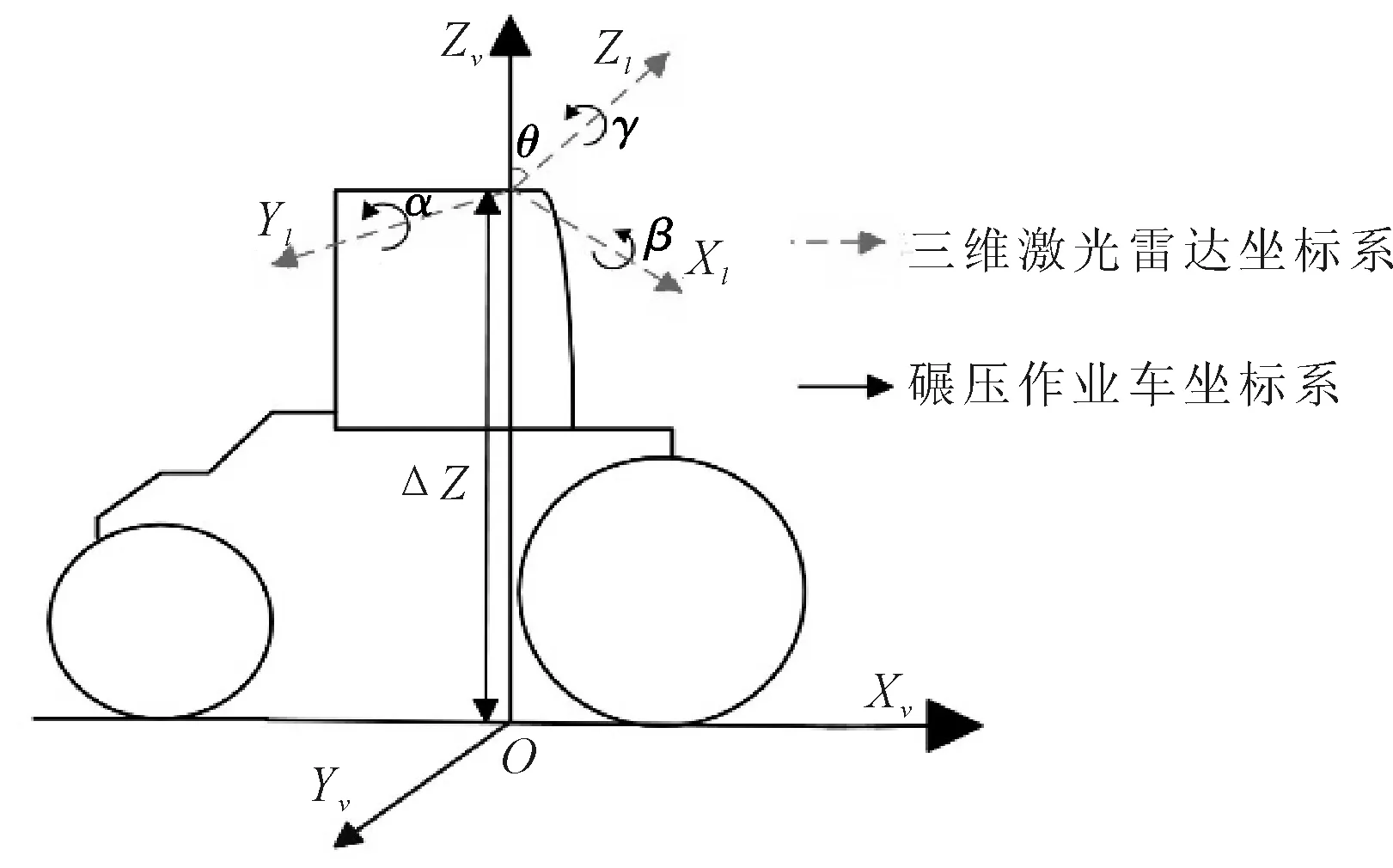
图2 车辆及激光雷达坐标系
激光雷达坐标系与车辆坐标系的横向和纵向平移量可通过现场直接测量得到,而激光雷达与地面的高度ΔZ、俯仰角β、侧倾角α的测量,采用传统方法会存在测量误差,且费时费力,笔者参考文献[9]所提出的标定算法,通过程序自动计算得出。但对于横摆角γ的测量,文献提出的标定方法,不适用于碾压作业面环境。因此,采用在车辆XV轴前方已知位置处放置标定物,经人工标定自动计算出横摆角γ。
1.3 雷达点云数据预处理
在获取激光雷达点云数据后,需要对雷达原始点云数据进行预处理。根据碾压作业车实际作业情况和规划路径的检测任务需求,选取感兴趣区域位于碾压作业车正前方,XV轴方向为0~30 m处,YV轴为-10~10 m。
在碾压作业车坐标系下构建栅格地图大小为长L为29.9 m、宽W为20 m(XV轴为0~29.9 m,YV轴为-10~10 m)。设置栅格单元在长度与宽度方向上的分辨率为0.1 m,将栅格地图划分成300×201个小栅格,其中每个小栅格为正方形。
2 碾压作业面障碍物检测
2.1 相对高度差栅格地图
碾压作业车的工作路面较为粗糙,且路面起伏较大,与一般将栅格内激光点云距地高度Hcloud作为栅格属性判断的方法相比,相对高度差方法能适应碾压作业车工作时有较大和较频繁的俯仰和侧倾,且可以对地面正常起伏进行有效区分,故能减少障碍误判率,对施工环境下正障碍的检测具有高精度、高适应性的效果。统计每个栅格中的激光点云距地高度值,将栅格中激光点云距地高度最大值与距地高度最小值之间的差值作为该栅格相对高度差ΔZ,当此栅格相对高度差值ΔZ大于设定阈值ΔZthr时,则表明此处存在明显的高度变化,则将此栅格标记为障碍物栅格[10]。
2.2 单线距离跳变栅格地图
针对图3(a)中负障碍物(深土坑)场景,随着检测距离增大,激光雷达检测到障碍物的有效高度差将变小,由于施工环境复杂,地面起伏较大,且碾压作业车自身震动及偏航等因素会造成高度差计算错误,相对高度差方法不适用于负障碍物检测。
图3(b)为土坑激光雷达点云数据扫描图,由于土坑显著低于地面,激光雷达将直接扫描到土坑的后沿壁。对于后沿壁上的激光点,其距离返回值相较于前方相邻的激光点显著增加,即在土坑的后沿壁上出现一个阶跃,如图3(b)圆圈所示。
若车辆处于理想情况下的水平地面,对单线激光扫描束而言,其返回的相邻激光点云之间是连续且不中断。当单激光束扫到障碍物时,其返回的点云的距离值会发生跳变,障碍物的宽度越宽,则激光扫描束的跳变越明显。激光雷达点云经坐标转换及预处理后,对单激光扫描束中的每个扫描点,分别计算其与上一个扫描点的距离变化差值Δr:
(1)
式中:f为经试验所得的距离系数;(xi,yi,zi)为该计算扫描点的属性值;(xi-1,yi-1,zi-1)为该计算扫描点上一个扫描点的属性值。
若距离差值Δr大于设定阈值ΔRthr,表明此处扫描点距离存在跳变,则判定此处存在障碍物,将点云数据距离r较小的扫描点标记为障碍物。依此规则,分别对16根激光线束进行处理,将标记的障碍物数据点投射到栅格地图中,得到负障碍物栅格地图如图3(d)所示,从图3(d)可看出,采用单线激光束径向距离跳变的方法,有效检测出土坑负障碍物,如图中箭头所示。作为对比,图3(c)为采用相对高度差方法得到的障碍物栅格地图,从图3(c)可看出,该方法仅检测出具有一定高度的土堆,未能有效检测出负障碍物。
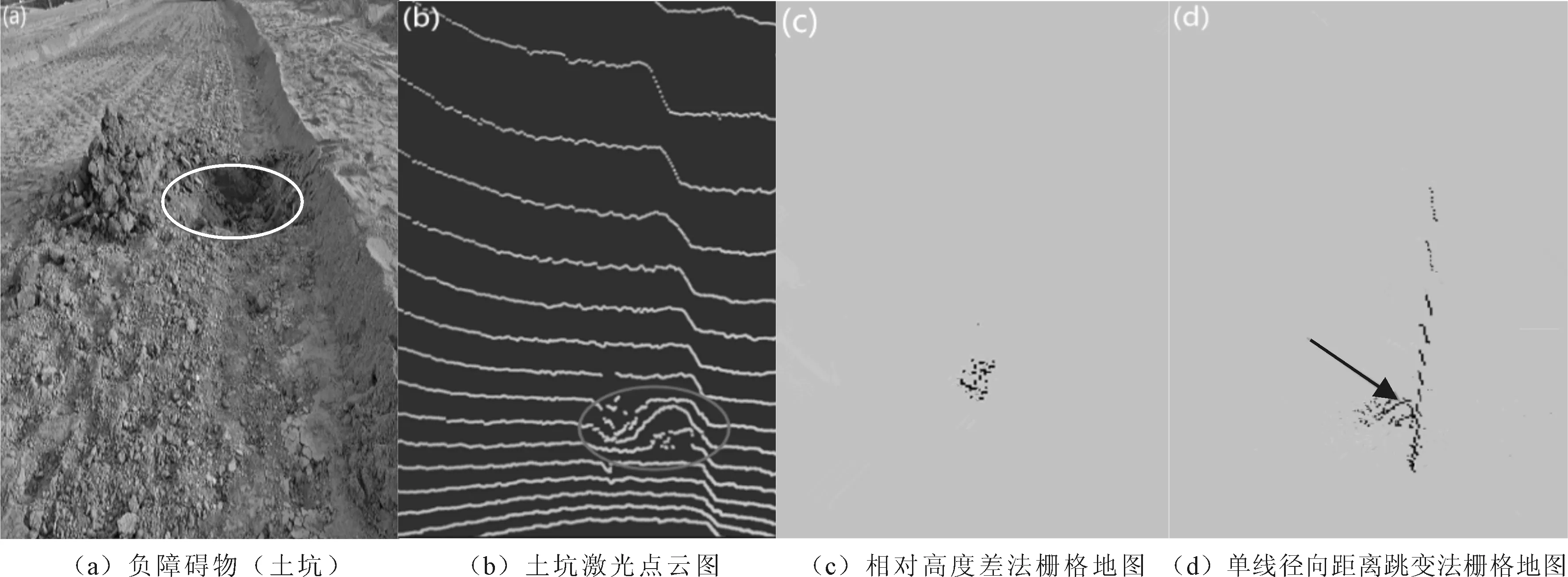
图3 障碍物检测结果图
2.3 局部双梯度阈值栅格地图
对于正障碍物和负障碍物,采用上述两检测方法均可以有效检测出,但在实际碾压工作环境中,对于如图4(a)中的坡道,上述各检测方法均不能有效检测。其原因在于:在离车距离较近区域内的坡道,其不存在明显相对高度差,因此较近区域内的坡道不会被检测出,而离车距离较远处的坡道,由于激光雷达扫描点在远处较为稀疏,相对高度差方法所采用的计算栅格尺寸太小,导致较远处坡道栅格内可能没有激光雷达扫描点。当坡道所处位置的高度值超过给定绝对高度阈值时,此处坡道被检测到,而离车距离较近区域内的坡道,其高度值不明显,较近区域内的坡道不会被检测到,绝对高度方法检测效果如图4(b)所示。针对离车距离较近区域的坡道,由于其变化幅度不大,单线径向跳变检测方法同样检测不出坡道。
对如图4(a)坡道的检测,笔者提出了一种局部双梯度阈值方法。考虑到16线激光雷达扫描点较为稀疏,且激光雷达点云预处理所选用的栅格尺寸太小,导致部分栅格内不存在激光点云。因此,针对激光雷达点云中某一扫描点A,以A为中心构建一定长度Llength的局部区域,分析计算该局部区域的双梯度属性。根据式(2)和式(3)计算该局部区域的双梯度值,扫描点A处的梯度值KA和局部区域的梯度值Klocal。
(2)
(3)
式中:ZA为扫描点的高度值;Zmax、Zmin分别为局部区域内点云距地高度最大值与最小值。
根据碾压作业面的实际环境,分别定义KthrA为扫描点A处的梯度阈值,Kthr为该局部区域的梯度阈值,两梯度阈值可通过坡道坡度计算得出。若满足以下条件时:Klocal>Kthr且Kthr>KthrA,则判断扫描点A处属于障碍物。通过对激光雷达所有扫描点进行局部双梯度阈值方法处理,得到障碍物栅格地图,局部双梯度阈值检测效果如图4(c)所示,从障碍物栅格图中可看出,栅格内双梯度阈值方法有效检测出坡道障碍物。

图4 坡道场景检测结果图
3 D-S证据理论数据融合
3.1 D-S证据理论
D-S证据理论由Dempster提出,并由其学生Shafer进一步发展起来的一种可以处理不确定性推理问题的数学方法[11]。D-S理论通过合成规则将来自两个或多个证据信息融合为一个最终的决策依据。笔者采用D-S组合规则对相对高度差、单线径向距离跳变、局部双梯度阈值等方法检测出的结果进行数据融合,并做出最终决策,得到全面的施工环境障碍物栅格地图。
障碍物状态判断的识别框架可定义为Θ={E,O},其中E表示不存在障碍物(empty),O表示存在障碍物(obstacles)。
若m(S)为识别框架Θ上的基本概率分配函数BPA(basic probability assignment),则m(S)表示证据信息对命题S的支持程度。分别定义m1,m2,…,mn为同一识别框架Θ上对不同证据依照某规则所建立的基本概率分配函数,若不同证据对命题的支持相互独立,可运用D-S证据合成公式对其组合得到新的融合结果,基本概率分配函数m,D-S证据合成公式如(4)所示。
(4)
式中:φ为空集。
3.2 基于D-S判决融合的障碍物检测
采用上述3种检测方法得到的栅格地图,彼此之间相互独立,利用D-S证据理论融合不同检测方法得到结果,采用D-S判决规则对融合结果进行决策,得出最终作业面障碍物栅格地图。
在作业面障碍物的检测过程中,由于上述3种检测方法得到的栅格地图均为0-1栅格地图,而若采用D-S证据理论进行融合,要求输入的栅格属性是概率值。因此,为了构造证据信息的基本概率分配值BPA,采用以下函数对各检测方法对栅格属性进行概率输出。公式如式(5)所示。
(5)
式中:B(l,w)为在车辆坐标系下l行w列处的栅格属性值;Athr为针对各检测方法所设置的相应阈值;C0为归一化参数值。
基于D-S证据的多检测方法信息融合框架如图5所示。
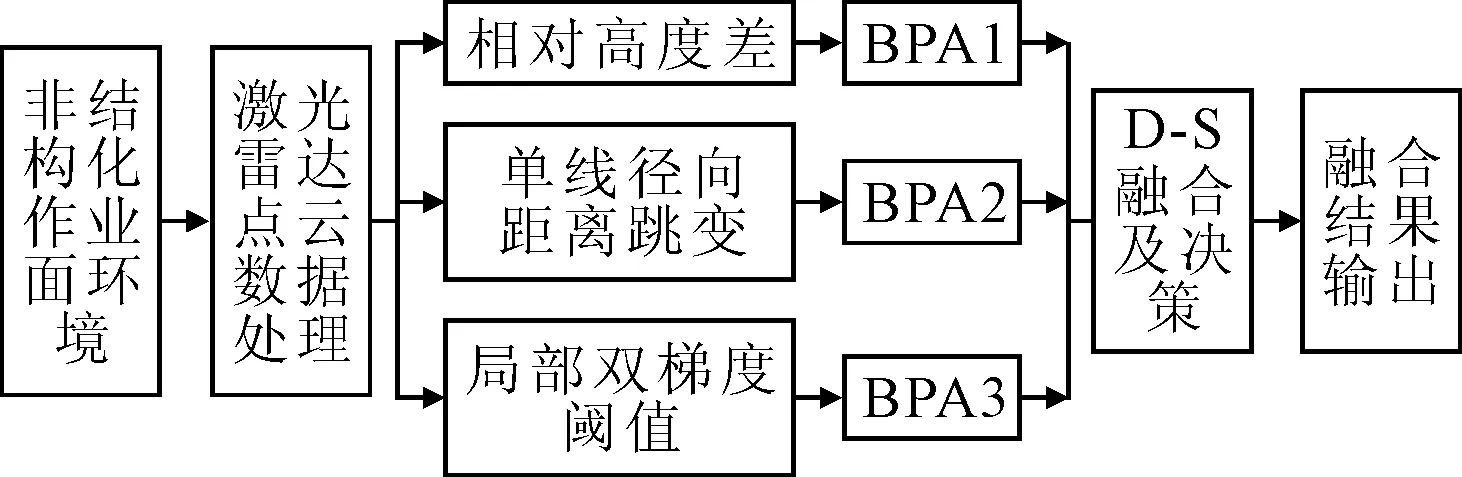
图5 多检测方法信息融合
为验证D-S证据融合效果,选取碾压作业面场景如图6所示,该碾压作业面包含土堆(正障碍物)、土坑(负障碍物)及坡道等道路场景。分别采用式(5)对各检测方法处理后的栅格属性进行概率输出,图7分别为相应检测方法的概率输出结果图,通过栅格中颜色的深浅来表征该栅格属于障碍物的程度,栅格的颜色越深,表明此栅格属于障碍物的概率越大;栅格的颜色越浅,表明此栅格属于障碍物的概率越小。

图6 复杂环境作业面场景
图7(a)为相对高度差方法概率输出结果图,在土堆的中心处,土堆高度差变化明显,经相对高度差方法检测后,其为障碍物的可能性最大,显示黑色较多。图7(b)为单线径向距离跳变方法概率输出结果图,在土坑处,存在激光线束距离的巨大跳变,经单线距离跳变方法检测后,此处为障碍物可能性较大,显示较多黑色;在坡道的顶端,由于在坡道上端与高平面之间存在距离跳变,此处被检测为障碍物,在坡道顶端显示黑色障碍物;在土堆处,由于激光线束扫描到土堆,也存在部分距离跳变,此处也显示部分黑色障碍物。图7(c)为局部双梯度阈值概率输出结果图,图7(c)中显示出坡道障碍物形状;在土堆处,土堆也存在一定的坡面,因此在土堆处也显示出障碍物。
将上述3检测方法得到的每个栅格基本概率分配值带入式(4)中,计算得出3个证据联合作用下的每个栅格最终合成的融合结果。针对D-S证据融合结果,通过特定的判决规则对最终概率值进行最后决策,判决规则如下:若m(o)≥m(e)时,即该栅格融合概率值较大时,则判决该栅格属于障碍物,若m(o) 图7 复杂作业面障碍物检测结果对比图 采用D-S证据理论融合多检测方法实现施工作业面的障碍物检测,有效避免单一检测方法存在的检测不全面问题。针对碾压作业车施工作业面环境,分别采用相对高度差、单线径向距离跳变、局部区域双梯度阈值等检测方法进行障碍物检测,获得障碍物栅格地图,然后将不同检测方法获得的栅格地图作为独立证据分别进行概率输出,再利用D-S证据理论去融合不同证据信息,最后采用D-S判决规则对融合结果进行决策,获得全面的碾压作业面障碍物栅格地图。融合检测方法有效实现碾压作业面的障碍物检测,满足实际工程应用的需求。
4 结论
