球杆系统基于二阶滑模的分级滑模控制
2019-12-14王益博
于 涛,王益博,杨 昆,赵 伟
(1.辽宁工业大学机械工程与自动化学院,辽宁 锦州 121001;2.北京印刷学院信息工程学院,北京 102600)
0 引 言
球杆系统是控制领域中经典的实验对象之一,它不仅结构简单,并且具有非线性、开环不稳定和欠驱动等重要性质,因此非常适合在实验室中研究控制方法的设计和实现。鉴于复杂非线性不稳定系统在控制器设计和验证上的实际困难,最新提出的控制方法可以先在球杆系统中进行测试,然后根据其在球杆系统中的控制效果来判定该控制方法的有效性。因此,球杆系统的控制方法研究对于非线性控制系统及其相关理论的研究具有十分重要的意义。
近期以来,已应用于球杆系统的控制方法主要有状态反馈控制[1]、切换控制[2]、动态面控制[3]、滑模控制[4]、模糊控制[5]、预测控制[6]等。球杆系统是一种2自由度欠驱动系统,欠驱动特性意味着球杆系统的控制问题可以借助欠驱动系统的控制方法来得以解决。分级滑模控制[7-8]是实现欠驱动系统稳定控制的有效方法,因此可以考虑应用分级滑模控制来实现球杆系统的有效控制。在基于传统滑模的分级滑模控制方法[7-8]中,由于不连续控制量显式地出现在控制律中,在未建模动态和非理想切换特性的影响下,控制器会产生有害的抖振现象。连续近似化方法[9]虽然能够抑制控制器抖振,但也会使滑模控制器丧失原有的鲁棒性。
高阶滑模[10]的出现使得构建连续的滑模控制器成为可能,因此可以考虑借助高阶滑模来实现无抖振的分级滑模控制。二阶滑模[10]是高阶滑模中最为成熟的控制方法,其中super-twisting算法[10]是目前应用最为广泛的二阶滑模算法。对于关于滑动变量的关系度为1的受控系统,super-twisting算法无需积分控制量的导数即可得出连续的滑模控制器。文献[11]和文献[12]在super-twisting算法基础上分别提出了不同的二阶滑模算法,通过引入不同的额外连续控制项来加快滑动变量及其导数的收敛速度。相较于文献[11]算法,由文献[12]算法得出的控制律相对简单且易于实现,同时推得的收敛时间估计也更为准确。为此,本文采用文献[12]提出的二阶滑模算法来构造连续的分级滑模控制器。
针对基于传统滑模的分级滑模控制器的前述不足,本文基于二阶滑模提出一种无抖振分级滑模控制器的设计方法,并基于所提方法设计了球杆系统的平衡控制器。在设计刚性球和连杆子系统的滑动变量基础上,进一步将两者结合成第二级滑动变量。本文控制器由切换控制律和第二级滑动面的等效控制律构成,其中切换控制律由第二级滑动变量和文献[12]提出的二阶滑模算法来推得。本文控制器不仅能够确保闭环控制系统的稳定性,并且具有较好的控制性能和很强的鲁棒性。
1 球杆系统的动力学方程
考虑如图1所示的无摩擦的球杆系统,连杆L在驱动力矩 τ的作用下绕轴心O点 转动,刚性球Q在重力作用下沿连杆上表面滚动。刚性球在连杆L上的位置和连杆的转角分别以r和 θ来表示。设刚性球的质量和半径分别为m和R,刚性球和连杆的转动惯量分别为Jm和JM。

图1 球杆系统的模型
选取r和 θ作为广义坐标,然后借助拉格朗日动力学来推导球杆系统的动力学模型。
首先,分析球杆系统的动能。分别计算刚性球和连杆的动能,并忽略刚性球动能中较小的速度乘积项可得球杆系统的动能为

然后,计算球杆系统的势能。选取轴心O点所在水平面为零势能面,可得球杆系统的势能为

其中g为重力加速度。
再将拉格朗日函数L=T-V代入拉格朗日方程,可得球杆系统的动力学模型为

球杆系统的动力学方程可以进一步转化为如下式所示的形式:

式中:


2 基于二阶滑模的分级滑模控制器
2.1 问题描述
球杆系统的控制目标是通过操纵驱动力矩使得刚性球稳定在连杆的中心位置,同时使连杆保持平衡,即使系统状态稳定在平衡点(θ=0,r=0)。根据球杆系统的控制目标,设计刚性球子系统的滑动变量s1(t)为

其中c1>0。

对于连杆子系统,设计滑动变量s2(t)为

其中c2>0。

考虑到球杆系统仅有1个驱动力矩,而闭环控制系统要求保证第一级滑动变量s1(t)和s2(t)都趋近于0。因此,进一步将s1(t)和s2(t)组合成第二级滑动变量S(t)

其中k1>0,k2>0。
通过构造球杆系统的第二级滑动变量,刚性球和连杆子系统的双目标控制问题能够转化为闭环系统的单目标控制问题,即通过选取适当的驱动力矩τ,使式(9)所示的滑动变量S(t)趋近于0。
2.2 控制律设计
由式(6)易知,刚性球子系统的等效控制律无法求得,因此文献[7]提出的控制器结构并不适用于球杆系统的分级滑模控制,即不能采用第一级各滑动面的等效控制律来构造球杆系统的分级滑模控制器。因此,本文采用具有如下结构形式的分级滑模控制器

式中:τeq——第二级滑动面的等效控制律;
τsw——待确定的切换控制律。

我不知道你注意到没有,在此次收购普洛斯的股权结构中:万科占比21.4%,厚朴、高瓴资本、S MG,分别持股21.3%、21.3%、21.2%,万科虽然为第一大股东,但股份仅比第二大和第三个股东高出0.1%,其象征意味大于实际意义。万科虽然控股,但从治理结构看,普洛斯管理层实际说了算。这对万科来讲,可能也并非是坏事。
将式(10)和式(12)代入式(11),可以得到

接下来,借助文献[12]提出的二阶滑模算法来推导控制器的切换控制律 τsw。
由式(4),可见k2b>0。在式(13)中,选择如下形式的状态反馈控制律

其中usw为新的控制量。
将式(14)代入式(13),可以得到

再由文献[12]提出的二阶滑模算法,可以得到控制量usw为

其中 λ1>0,λ2>0。

其中 λ3>0。
由式(14)和式(16),可得控制器的切换控制律τsw为

由式(12)和式(19),可得分级滑模控制律 τ为

2.3 稳定性分析
定理1:对于式(4)所示的球杆系统,分别按式(5)、式(7)和式(9)设计球杆系统的各级滑动变量,若采用式(20)所示的分级滑模控制器,则第二级滑动变量S(t)及其导数能够在有限时间内收敛于0。
证明:首先将控制律式(20)代入式(11),可以得到

然后再采用文献[12]第五章定理1的证明方法,可以证明滑动变量S(t)及其导数是有限时间收敛的。限于篇幅,本定理的具体证明过程以及二阶滑模算法式(21)的收敛时间分析请参阅文献[12],本文此处不再赘述。
定理2:对于式(4)所示的球杆系统,分别按式(5)、式(7)和式(9)设计球杆系统的各级滑动变量,若采用式(20)所示的分级滑模控制器,则第一级滑动变量s1(t)和s2(t)渐近收敛于0。
球杆系统的第一级滑动变量s1(t)和s2(t)的渐近收敛性可由文献[13]定理4.2的证明结果得出。限于篇幅,本定理的具体证明过程请参阅文献[13],本文此处不再赘述。
3 数值仿真实验
为验证本文方法的有效性,在Matlab仿真环境中进行球杆系统的平衡控制实验。整个数值仿真实验过程主要包括控制性能测试和鲁棒性测试两部分。
在仿真实验中,按文献[14]选取球杆系统的各参数:刚性球的质量为m=0.27kg,刚性球的转动惯量为Jm=4.32×10-5kg·m2,连杆的转动惯量为JM=0.1402kg·m2,刚性球的半径为R=0.02m。
结合球杆系统的实际装置[14],在仿真实验中设置刚性球在连杆上滚动的行程 |r|≤0.4m,设定作用于连杆L的驱动力矩 |τ|≤ 3N·m。
在控制性能测试和鲁棒性测试实验中,球杆系统的初始状态均设为
3.1 控制性能测试
首先,通过与基于传统滑模的分级滑模控制器进行比较来测试本文控制器的控制性能。
鉴于文献[7]提出的控制器结构不能直接应用于球杆系统,因此可先按本文式(10)方式来构造分级滑模控制器,然后再按文献[7]方法设计分级滑模控制律。按上述方式可以得到基于传统滑模的分级滑模控制器为

在控制器式(22)中,各参数的选取范围和各滑动变量的设计均与本文控制器相同。
为使两种分级滑模控制器均能发挥出最佳性能,采用文献[15]方法对两者进行优化。在进行仿真对比时,本文控制器式(20)的各参数分别取为c1=3.0934,c2=7.858,k1=2.5543,k2=0.2788,λ1=8.1163,λ2=8.9775,λ3=1.1111。
基于传统滑模的分级滑模控制器式(22)的各参数分别取为c1=0.9323,c2=4.3321,k1=5.2257,k2=1.3368,λ1=1.192,λ2=0.595。
本文控制器的仿真实验结果如图2所示。图2(a)和图2(b)分别为刚性球位置r和连杆转角 θ的变化曲线,可以看出在本文控制器作用下球杆系统能够快速、准确地收敛至期望的平衡点,刚性球位置r和连杆转角 θ收敛至0的时间分别为3.68 s和4.46 s。图2(c)为作用于连杆L的驱动力矩 τ的变化曲线,可见本文控制器的输出信号较为连续光滑,没有呈现出明显的抖振现象。仿真实验结果表明,本文方法有效地实现了球杆系统的无抖振分级滑模控制。
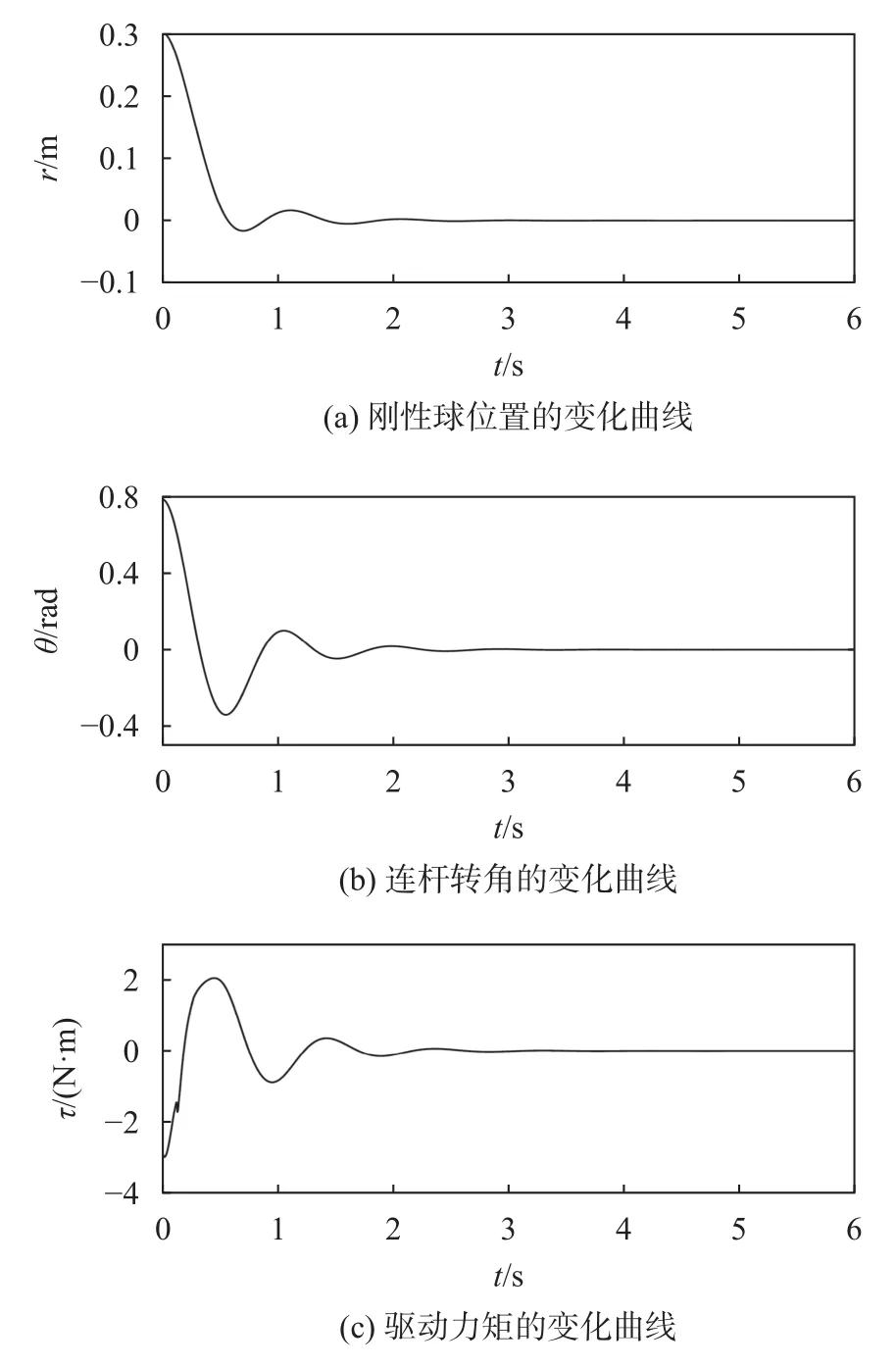
图2 本文控制器的仿真实验结果
基于传统滑模的控制器式(22)的仿真实验结果如图3所示。由仿真实验结果可以看出,式(22)所示控制器能够有效实现球杆系统的镇定控制,从而再次验证了本文所采用的分级滑模控制器结构式(10)的合理性。由图3(a)和图3(b)可以看出,在控制器式(22)的作用下,刚性球位置r和连杆转角θ收敛至各自期望值的时间分别为5.54 s和4.62 s。由图3(c)可以看出,基于传统滑模的控制器式(22)存在十分明显的抖振问题。
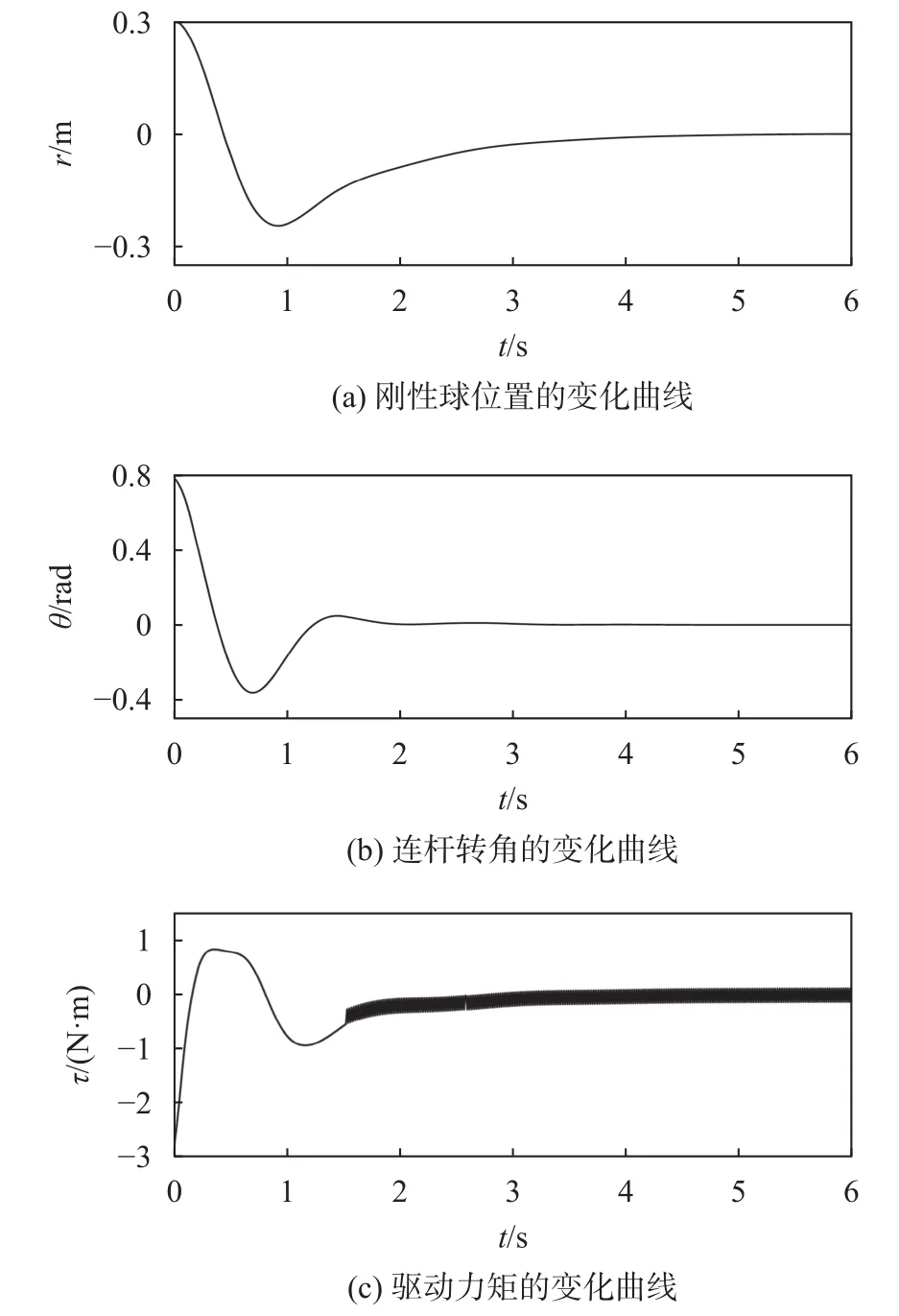
图3 基于传统滑模的控制器式(22)的仿真实验结果
为量化两种分级滑模控制器的控制性能,分别定义平均刚性球位置误差E(r)和平均连杆转角误差E(θ)为

式中:n——采样点总个数;
ti——第i个采样时刻。
采用式(23)分别计算两种分级滑模控制器的平均刚性球位置误差E(r)和平均连杆转角误差E(θ),所得两种分级滑模控制器的性能指标如表1所示。
分别对比表1中两种控制器的性能指标E(r)和E(θ)可见,本文控制器的控制效果较好,本文控制器作用下平均刚性球位置误差E(r)为0.017 3 m,平均连杆转角误差E(θ)为 0.054 4 rad。此外,对比图2和图3中刚性球位置r和连杆转角 θ的变化曲线可见,相较于基于传统滑模的控制器式(22),本文控制器还能够较好地抑制球杆系统超调。
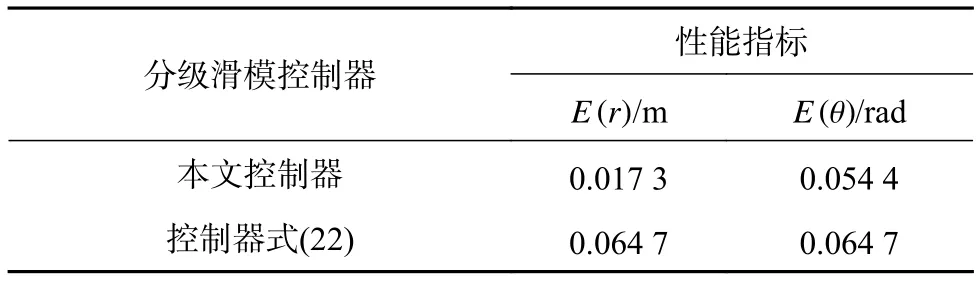
表1 两种分级滑模控制器的性能指标
3.2 鲁棒性测试
通过测试受扰条件下闭环系统的控制性能来验证本文控制器的鲁棒性。为此,在控制性能测试实验基础上,在连杆转角上分别添加不同类型的干扰信号。在 6~9 s 加入幅值为 0.017 5 rad 的阶跃干扰,在 13~16 s加入频率为 1.5 Hz、幅值为 0.017 5 rad的正弦干扰。鲁棒性测试实验中,本文控制器参数与控制性能测试实验相同。
本文控制器的鲁棒性测试结果如图4所示。由图可知,虽然闭环系统性能受到了外加干扰带来的不良影响,但本文控制器还是能够确保球杆系统的稳定性,并且获得了较好的控制效果。仿真实验结果表明,本文控制器能够有效抑制和消除外加干扰对闭环系统性能的不良影响,具有很强的外部干扰鲁棒性。

图4 本文控制器的鲁棒性测试结果
4 结束语
针对球杆系统的控制问题,本文设计了一种基于二阶滑模的无抖振分级滑模控制器。鉴于已有分级滑模控制器结构的局限性,本文方法采用了一种通用性更好的分级滑模控制器结构。基于所提控制器结构和球杆系统的第二级滑动变量,本文方法借助二阶滑模算法推导出连续光滑的分级滑模控制器。仿真实验结果不仅表明了本文所提出的控制方法的有效性,并且验证了本文控制器对于外部干扰具有很强的鲁棒性。球板系统是球杆系统的二维扩展,基于本文方法进一步寻求球板系统控制问题的解决方案是本文下一步将要开展的主要工作。
