度盘式指示表自动检测仪控制系统设计
2019-12-11王红敏崔晨晨隋文涛
王红敏,崔晨晨,隋文涛
(1.山东理工大学 机械工程学院, 山东 淄博 255049; 2. 中国计量大学 计量测试工程学院,浙江 杭州 310018)
度盘式指示表是长度测量中一种常用的计量器具,在生产企业及科研单位的计量部门使用频率甚高,尤其在一些设备制造行业中,是企业保证质量和提高生产效率的关键。因使用频率高,故指示表在使用过程中难免会产生误差,为了提高度盘式指示表的检测精度和速度,需要相应的快速检测设备[1],本文将设计相对应的伺服控制系统,以匹配其快速高精度检测。
1 指示表自动检测仪伺服控制系统基本单元
伺服控制系统是指示表自动检测仪的重要组成部分,控制系统主要由PC、运动控制及数据采集器、步进电机驱动器、步进电机、传动机构、光栅位移传感器、信号调理电路组成,其控制系统基本结构如图1所示。

图1 伺服控制系统结构图Fig.1 Structure diagram of servo control system
当检测系统工作时,首先PC通过RS232串口将控制指令发送给运动控制器,运动控制器在接收到指令后,发送相应的控制信号给步进电机驱动器,控制信号经过驱动器细分放大后,驱动步进电机执行相应的运动状态[2-3]。步进电机通过减速装置将作用力传递给滚珠丝杠,丝杠带动与滑台连接的测量头对指示表进行微量进给,通过光栅位移传感器把进给量实时反馈给运动控制器,构成闭环控制系统,由此使步进电机运动更加精准。
2 运动控制及数据采集器设计
通过对步进电机驱动器的分析,综合考虑系统性价比、兼容性、开发难度等因素,本系统选择意法半导体公司的STM32F103C8T6单片机作为运动控制芯片,其主要功能是负责运动控制,以及对光栅传感器的数据进行采集,此类型的单片机具有质量好、功耗低、体积小、价格便宜、抗干扰能力强、技术成熟、环境适应能力强等特点[4-5]。
2.1 通信接口的选择
PC与STM32之间选用RS232通讯协议,MAX232是一种把PC的串行口RS232信号电平(-10 V ,+10 V)转换为单片机所用到的TTL信号电平(0,+5 V)的芯片。其内部具有双组驱动器和接收芯片,完全可以满足RS232的电平转换要求[6-7]。RS232串行线主要在计算机与外部设备间进行数据传送,其转换电路如图2所示。

图2 MAX232芯片电平转换电路Fig.2 Level switching circuit of MAX232 chip
2.2 光栅位移传感器信号调理电路设计
2.2.1 差分电路设计
差分电路主要是将光栅尺的差动输入信号转换成单端输出信号,以便后面的电压比较器使用。本电路选用INA105芯片,该芯片是精密差分放大器,不需要价格很高的电阻网路。用该芯片设计的差分放大电路具有较高的共模抑制比,可以很好地抑制零点漂移以及噪声和干扰。其放大电路如图3所示。
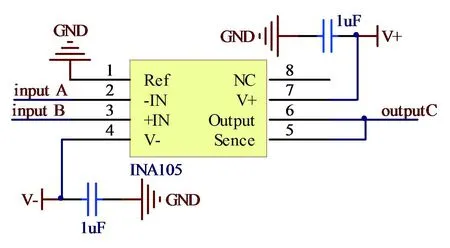
图3 差分电路Fig.3 Differential circuit
2.2.2 电压比较电路设计
由于本系统选用的光栅位移传感器输出的信号是标准的正弦信号,因此选用电压比较电路进行转换才能进行后续的信号处理,电压比较电路可以把正弦信号转换成方波信号。在本设计电路中选用MAX913芯片,MAX913是单路、高速、低功耗、具有差分输入和互补TTL输出的比较器,由MAX913组成的电压比较电路如图4所示。

图4 电压比较电路Fig.4 Voltage comparator circuit
2.2.3 细分辨向电路设计
正弦信号经过电压比较电路转换成了方波信号,虽然能够被单片机处理,但是为了提高位移测量的分辨力,要对整形后的方波信号进行细分处理。由于测量指示表时要进行正、反行程误差的测量,所以需选用细分辨向电路。先由CD4013进行二细分然后与后面的四细分电路级联构成八细分电路,通过两路方波相位的相对导前和滞后的关系进行方向的判别,其电路如图5所示。
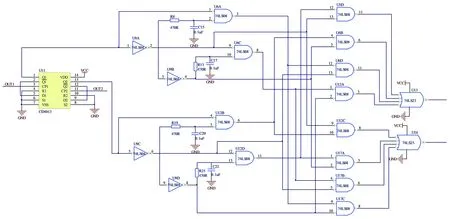
图5 细分辨向电路Fig.5 Subdivision and direction-distinguishing circuit
2.2.4 可逆计数器设计
经过细分辨向后,需要对细分后的方波信号进行计数,才能获得相应的位移量信息。本系统选用74LS193可逆计数器对细分后的方波信号进行计数。74LS193可逆计数器可以进行4位二进制输出,本系统采用两片74LS193级联的方式,这样最多可计255个脉冲。74LS193可逆计数器级联电路如图6所示。

图6 74LS193可逆计数器级联电路Fig.6 The cascade circuit of 74LS193 reversible counter
2.2.5 数据缓冲器设计
脉冲信号经过可逆计数器后,为了保证可逆计数器传送给STM32的数据不发生丢失,还需要经过数据缓冲器才能与STM32相连。针对本系统测量精度的要求,需选用高性能的缓冲芯片。本系统选用74LS125芯片作为数据缓冲器,74LS125是四总线数据缓冲器。因为级联后的74LS193输出的是8位数据,所以这里对74LS125也采用了级联方式与74LS193进行连接。其连接后的电路如图7所示。
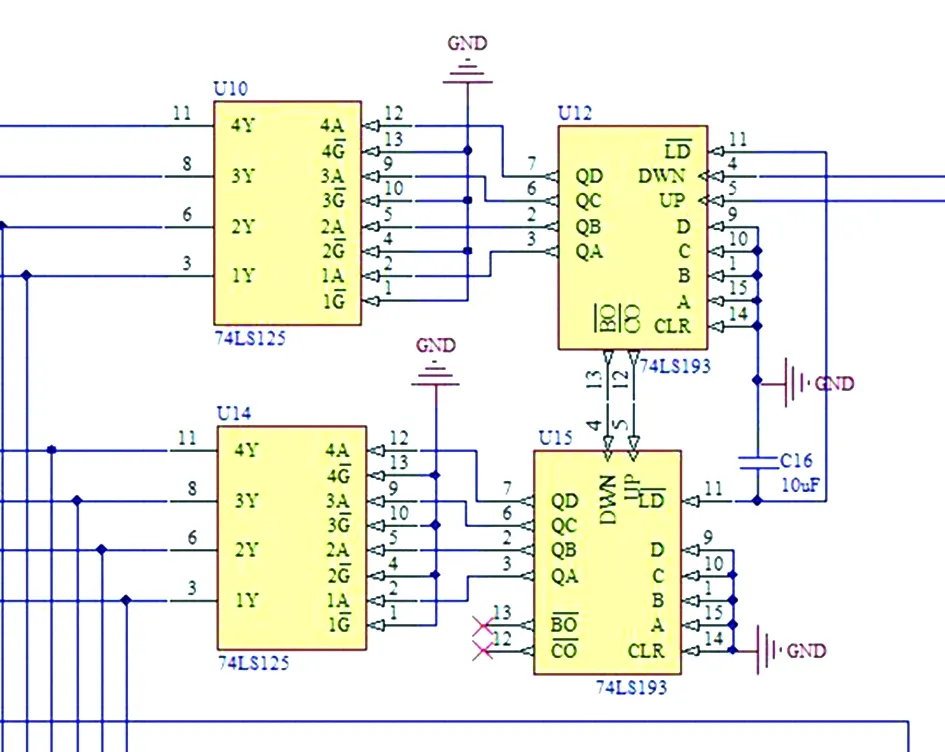
图7 74LS193与74LS125级联电路Fig.7 Cascade circuit for 74LS193 and 74LS125
3 步进电机驱动器设计
在考虑选择步进电机驱动器时,要求其不仅要驱动步进电机工作,还要达到相应的细分要求,同时在尽量降低驱动器功耗的情况下,要保证功率放大器的安全运行,所以本系统选用THB6064AH二相步进电机驱动芯片。该芯片采用脉宽调制和斩波驱动方式,可以进行双全桥MOSFET驱动,最高耐压高达50 V,峰值电流为4.5 A,具有自动限流和半流锁定功能,内置温度保护及过流保护,低电压检测电路,可以进行8种细分方式和4种衰减方式的选择,具有稳定性高、价格较低、外围电路简单等优点,因此该芯片为实现系统高性能、低成本、小型化步进电机的驱动提供了最佳方案[8-10]。THB6064AH芯片的应用电路如图8所示。
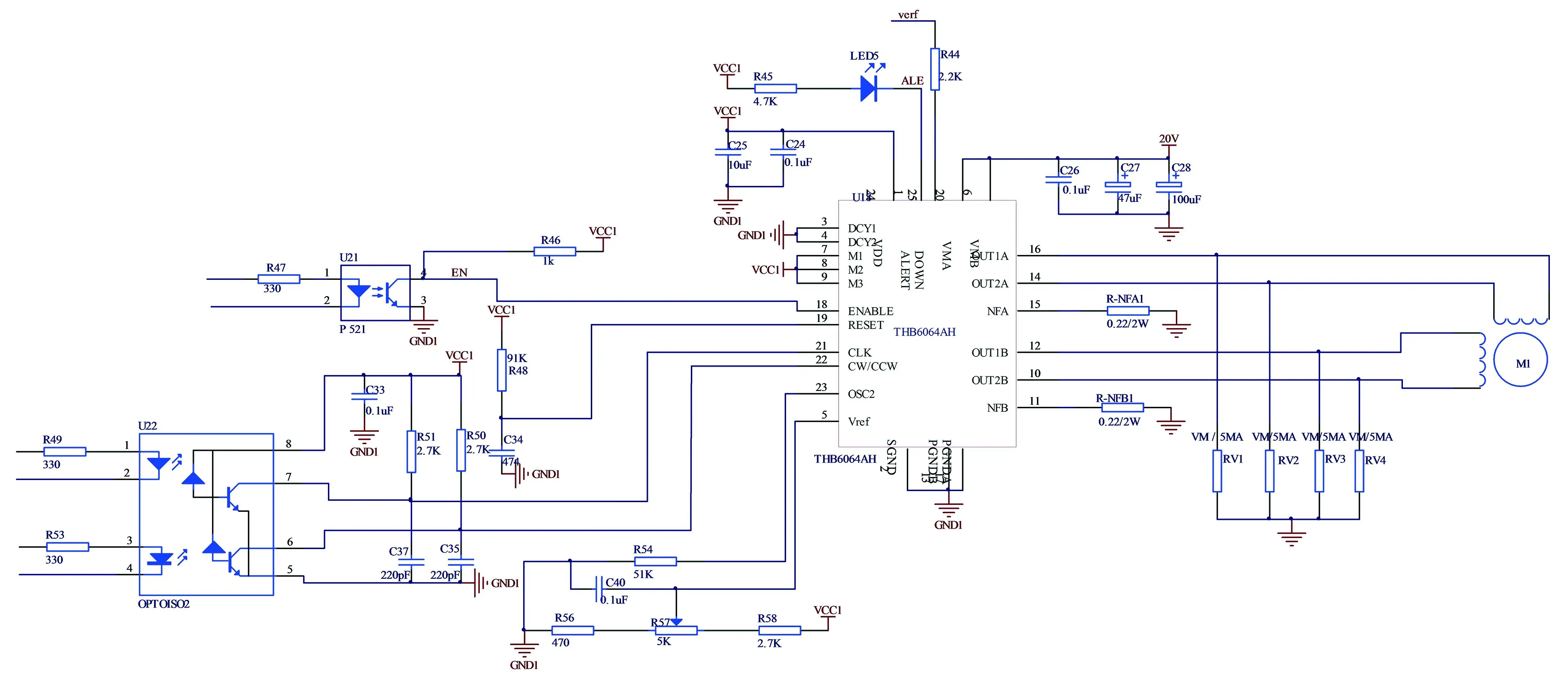
图8 THB6064AH应用电路Fig.8 THB6064AH application circuit
4 结束语
本文对指示表自动检测仪的伺服控制系统进行了完整的创新设计,根据系统需要设计了运动控制器,并对信号处理电路和驱动电路进行了设计,其主要创造性工作如下:(1)系统中采用高性能驱动芯片,使步进电机运行更加平稳和精准,其进给量误差小于0.1 μm。(2)对光栅位移传感器输出的正弦信号进行了滤波、整形、细分辨向、计数缓冲等处理,经实际测试检验,该伺服控制系统的测量误差不超过0.25 μm,与之前的指示表检测相比较[11],大大提高了系统的测量准确度。
因此,该伺服控制系统在测量方式、分辨力和测量准确度等方面均有进一步提高,为仪表检测提供了一种精确高效的检测方法,对于指示表检测仪的准确快速检测具有重要现实意义。
