基于CRUISE的纯电动拖拉机作业性能研究
2019-12-11方树平王宁宁易克传缑瑞宾徐立友夏先文
方树平,王宁宁,易克传, 缑瑞宾,徐立友,夏先文
(1.安徽科技学院 机械工程学院,安徽 滁州 233100;2.河南科技大学 车辆与交通工程学院,河南 洛阳471003;3.长城汽车股份有限公司,河北 保定 071000)
目前,石油资源日益匮乏,环境污染问题日趋严重,纯电动拖拉机采用电驱动模式,具备不耗费石油、结构简单、污染小的优点,是农业机械的发展趋势之一[1-3]。在电动拖拉机开发中,拖拉机作业工况的真实性对作业性能预测具有重要影响,而目前对拖拉机作业工况的研究较少,不少学者采取恒速作业作为仿真输入,其得到的结果与拖拉机真实作业性能尚有差距。不同于电动汽车仿真软件种类繁多,针对纯电动拖拉机的仿真软件并不多见。方在华、胡世根等[4-6]开发了一些拖拉机性能预测软件,取得了预期的效果,但由于这些软件年代久远、通用性不高、移植性不强及知识产权的问题,并未被广泛的同行企业人员所掌握,并且通常不能进行动态仿真分析。为了避免选型过程中的盲目性,CRUISE软件在混合动力汽车的开发中被广泛使用。国内有学者也尝试将该软件用于新能源拖拉机的性能预测中[7-9]。文献[8]利用CRUISE软件对纯电动拖拉机进行了仿真,但在仿真过程中未考虑工况和拖拉机滑转率的控制;文献[9]利用CRUISE软件对增程式电动拖拉机进行了仿真分析,完成了性能的预测。上述研究的电动拖拉机均在原车的基础上进行开发,将传统燃油拖拉机用电动机代替,并未对传动系统结构形式做出大的改变。本文通过分析拖拉机作业工况,采用CRUISE软件,针对研发中的15 kW纯电动拖拉机(An Hui Ke Ji Xue Yuan-Pure Eeletric Tractor,以下简称AK-PET)搭建仿真平台,将制定的拖拉机作业工况导入仿真平台进行作业性能仿真分析,以期为纯电动拖拉机开发提供技术支持。
1 拖拉机作业工况分析
工况作为仿真系统的输入,其真实准确性对拖拉机作业性能的分析至关重要。然而,目前从知网检索的文献来看,针对国内拖拉机作业工况的采集研究较少。由于各地域气候、环境、土质等呈现多样性,最佳作业工况理当不尽相同。拖拉机开发设计时一般采用恒定作业速度来代替作业工况,并不能够反映拖拉机加减速、阻力突变等工况所造成的电力损耗,因此造成了性能分析时的原理误差。本文针对以上问题,着重分析拖拉机常见的运输工况和旋耕工况。
拖拉机的运输工况主要结合城乡常见路况,考虑了3种路面:土路、水泥路和柏油路。柏油路运输速度为40 km/h,水泥路为28 km/h,土路为20 km/h。其运输工况如图1所示。
拖拉机旋耕工况的采集地选择安徽科技学院玉米试验田,其坡度为0°,长*宽=100 m*62.5 m。文献[10-11]表明,采用深松35 cm+旋耕的耕作方式,玉米能够得到较高的产量。旋耕作业采用横轴式旋耕机,耕地宽度为1.25 m,深度14 cm左右,从宽度方向中心线左侧起耕,采用内翻法进行深松后的玉米地旋耕作业,旋耕速度6 km/h,旋耕机主轴转速控制在180 r/min左右。到地头降速转弯,转弯时旋耕机不工作,转弯速度为3 km/h,经过25次往返作业,用时3 250 s,完成了0.625 hm2地的旋耕作业,得到的拖拉机旋耕作业工况如图2所示。由图1和图2可知,运输工况和旋耕工况都存在着频繁的加减速情况。作业工况的制定为将来AK-PET作业性能仿真提供输入信号。

图1 拖拉机运输工况Fig.1 Working conditions of tractor transportation
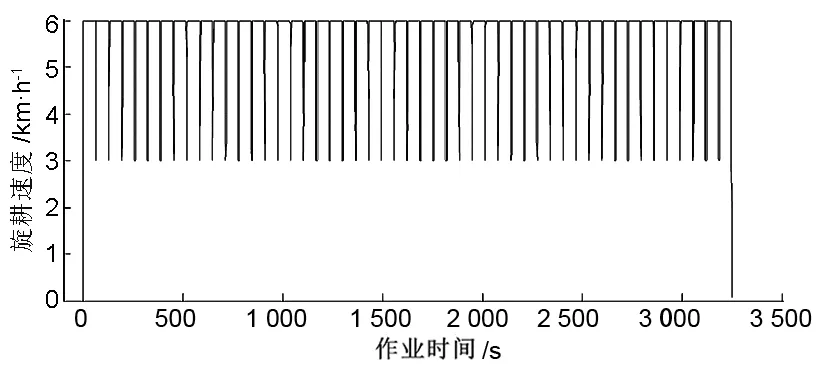
图2 拖拉机旋耕工况Fig.2 Woking conditions of tractor rotary tillage
2 AK-PET动力系统传递方案及主要参数
设计的纯电动拖拉机驱动系统结构方案如图3所示,其传递路线及特点在前期研究文献[12-14]中已作详细介绍,这里不再赘述。其主要参数见表1。
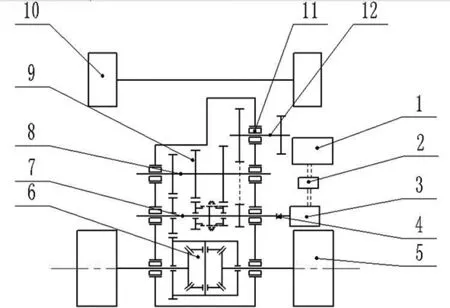
1.蓄电池组;2.电机控制器;3.牵引电动机;4.联轴器;5.拖拉机驱动轮;6.差速器;7.变速器输入轴;8.变速器中间轴;9.变速器;10.拖拉机前轮;11.轴承;12.动力输出轴图3 纯电动拖拉机驱动系统结构方案Fig.3 Structure program of pure electric tractor drive system
表1 纯电动拖拉机主要参数
Tab.1 Pure electric tractor main parameters
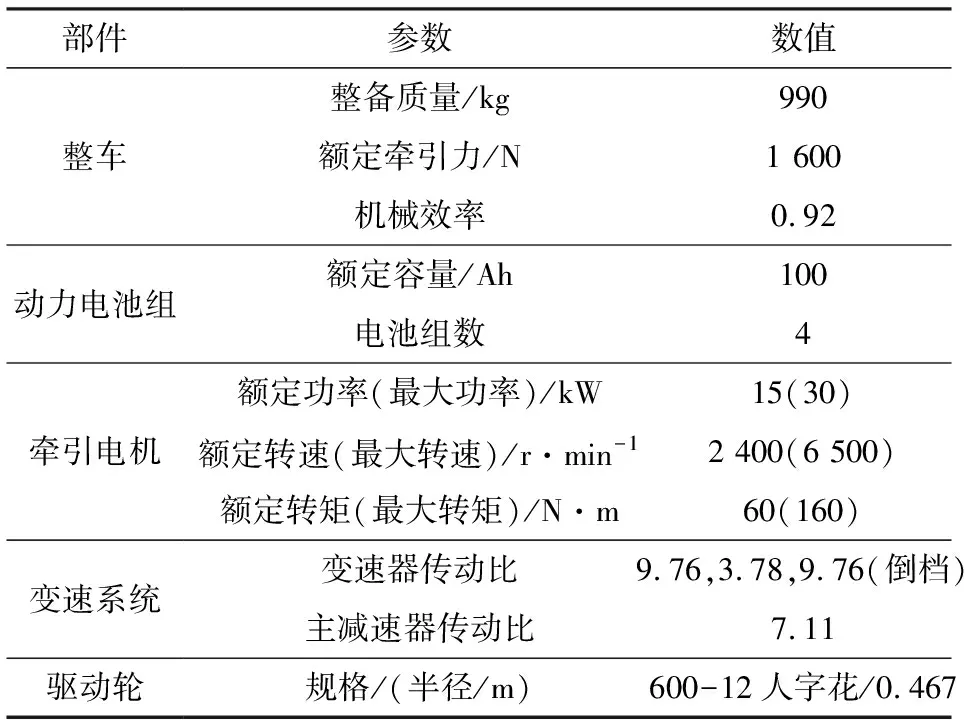
部件参数数值整车整备质量/kg990额定牵引力/N1 600机械效率0.92动力电池组额定容量/Ah100电池组数4牵引电机额定功率(最大功率)/kW15(30)额定转速(最大转速)/r·min-12 400(6 500)额定转矩(最大转矩)/N·m60(160)变速系统变速器传动比9.76,3.78,9.76(倒档)主减速器传动比7.11驱动轮规格/(半径/m)600-12人字花/0.467
3 基于CRUISE的AK-PET动态仿真平台建立
CRUISE作为一种前向式仿真软件,广泛应用于车辆系统动力学的仿真,可实现对复杂动力传动系统的动态仿真分析、控制策略的开发,被众多高校研究人员和企业所采用[7-9]。考虑到AK-PET结构方案与汽车有较多相同部件,如动力电池、驱动电机、变速系统等,故采用CRUISE平台搭建了AK-PET仿真模型,如图4所示。该模型主要包括动力电池、驱动电机、两挡变速箱和驾驶员模型。
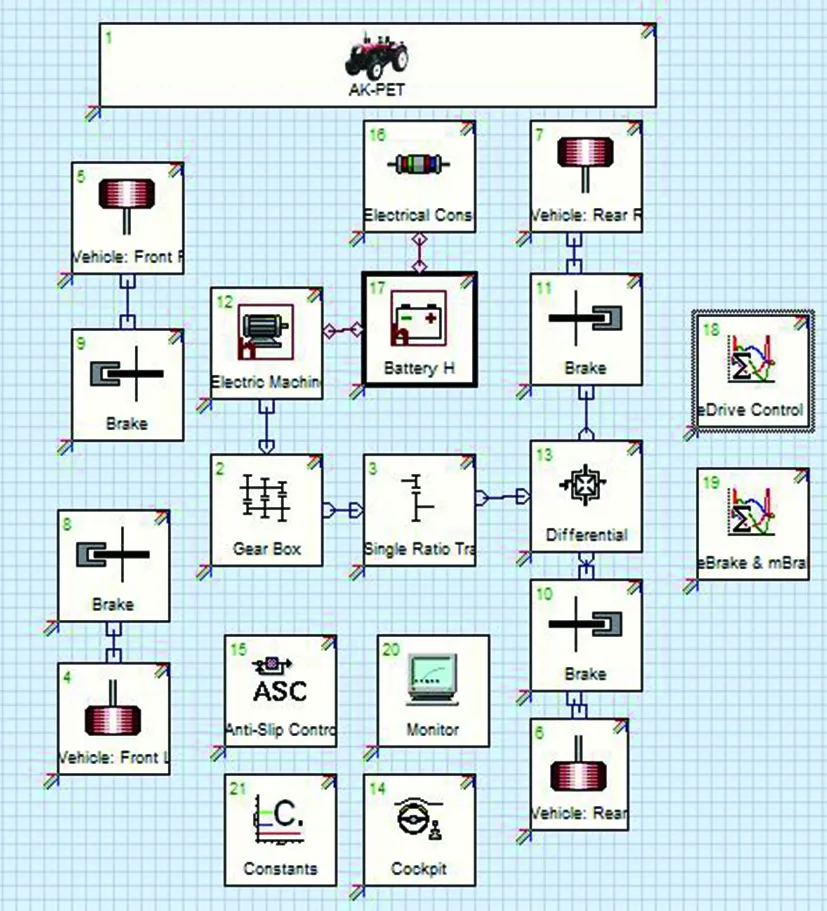
图4 AK-PET仿真模型Fig.4 Simulation model of AK-PET
针对拖拉机与汽车的异同,对图4所示的仿真模型做了以下修改:拖拉机的滑转特性与汽车有明显不同[4-6],基于此在车轮模型中定义了附着系数随滑转率变化的关系;由于AK-PET低速起步转矩大,为了防止起步时产生过大滑移率而导致其失去操控稳定性,故施加了起步驱动防滑控制模块ASC,并编写了简易控制程序;对驱动控制模块(e-drive)和制动控制模块(e-brake)重新编写了程序,以适应AK-PET的田间作业工况;针对两挡式变速器,编写了基于速度换挡的简易换挡策略。经过以上4个步骤,图4所示的AK-PET仿真平台基本完成。在仿真模型机械连接完毕、相关模块程序编写完成后,进行了信号线之间的连接。
作业工况的处理是本文中的重点和难点。将速度信号按照指定格式编写,并将文件命名为Tractor_transportation.pro(运输工况)和Rotary tillage.pro(旋耕工况),存放在CRUISE安装文件中的Profiles中。待仿真完成后,生成的结果数据存放在Driving Cycles下的Rotary tillage文件夹和Tractor_transportation文件夹中。
根据表1所示参数,在基于CRULSE搭建的AK-PET仿真界面中输入相应数据。因部件较多,这里简要介绍驱动电机特性参数的输入。所采用的驱动电机MAP图如图5所示。所采用的驱动电机转速在[0,650 0] r/min,驱动电机的转矩在[0,160] N·m,因为驱动电机额定转矩为60 N·m,极限转矩为160 N·m,有一定的过载系数,但工作过程中过载时间不宜过长,以免造成电机发热严重和电池寿命的缩短,因此考虑将驱动电机的输出转矩控制在60 N·m以下。驱动电机的效率在[0.50,0.895]之间,而且在转速2 400 r/min左右、转矩60 N·m时,效率处于较高值。驱动电机控制策略应当使驱动电机工作在较高效率的区域。
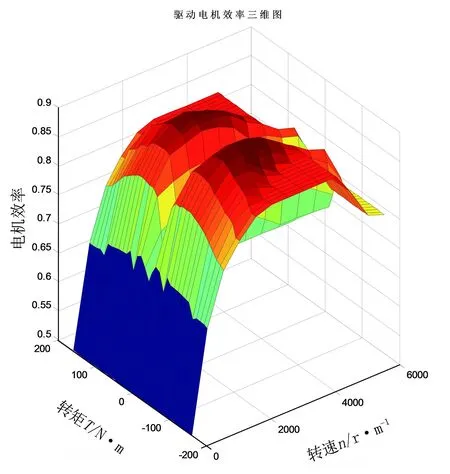
图5 AK-PET驱动电机MAP图Fig.5 MAP of AK-PET drive motor
4 仿真实验结果分析
在完成以上步骤后试运行,发现了75个错误,找出出错位置并改正后,最终能够顺利进行仿真实验。
4.1 运输工况仿真实验结果
采用运输工况作为仿真输入,经过10 s的仿真运算时间,牵引1 000 kg货物按照图1所示的工况从事运输作业,仿真结果如下:
(1)图6所示为运输工况下AK-PET需求车速与实际车速对比图。在400 s的仿真时间里,实际车速与需求车速之间的差值最大值为1.08 km/h,发生在仿真时间21 s。整个仿真过程中,速度误差的平均值为0.01 km/h,说明实际车速能够良好地跟随需求车速,AK-PET未出现动力不足的情况。
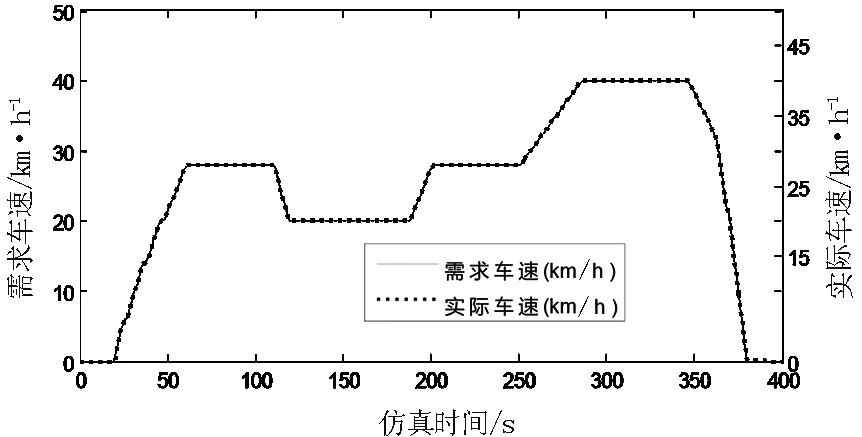
图6 运输工况下AK-PET需求车速与实际车速对比图Fig.6 Comparison chart of required speed and actual speed of AK-PET under transportation condition
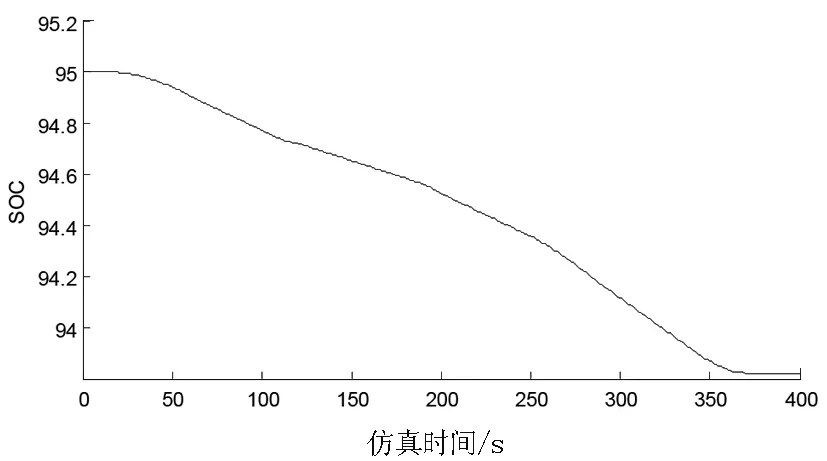
图7 运输工况下AK-PET动力电池SOC变化曲线Fig.7 SOC curve of AK-PET batteries under transportation condition
(2)图7所示为运输工况下AK-PET动力电池SOC变化曲线。在400 s的仿真时间里,电池SOC由初始值95%降低到了93.82%,在加速阶段,SOC下降速度增大,车速越高,SOC值降低越快;减速停车阶段SOC值下降速度明显放缓。整个过程中SOC变化曲线基本上比较平顺,电池工作状态良好。
(3)图8所示为运输工况下AK-PET驱动电机转速与扭矩输出曲线。在400 s的仿真时间里,可以看出,起步阶段,驱动电机输出转矩由0迅速增大到20.44 N·m,而驱动电机额定转矩设置为60 N·m,说明自身编写的ASC程序起到了作用;整个工作范围,驱动电机输出转矩平均值为12.58 N·m,说明AK-PET牵引1 000 kg货物从事运输作业,载荷较小,应该能够承受更重的载荷工作。驱动电机的平均转速为3 975 r/min,最高转速6 114 r/min,说明为了跟随需求车速,电机工作在高转速区域。

图8 运输工况下AK-PET驱动电机转速与转矩输出曲线Fig.8 Speed and torque output curve of AK-PET motor under transportation condition
(4)图9所示为运输工况下AK-PET驱动电机功率与效率输出曲线,在400 s的仿真时间里,驱动电机输出机械功率最大值为9.21 kW,平均值为5.47 kW。驱动电机工作效率最高值为0.826,平均值为0.748。说明驱动电机完全能够承受1 000 kg货物按照需求车速行驶,机械功率尚有富余。而效率平均值偏离驱动电机效率最佳值0.895约0.147,证明电机的工作状态还有上升的空间。为提高工作效率,有两种途径可以尝试,即通过调整变速器速比和增加运输货物的重量,但有待进一步深入研究。
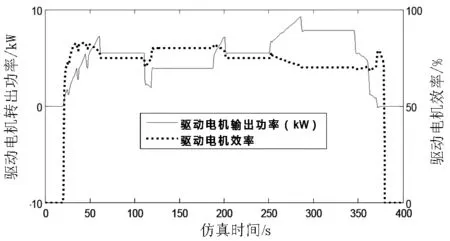
图9 运输工况下AK-PET驱动电机功率与效率输出曲线Fig.9 Power and efficiency output curve of AK-PET motor under transportation condition
4.2 旋耕工况仿真实验结果
采用旋耕工况作为仿真输入,旋耕阻力为4 663.2 N,经过15 s的仿真运算时间,仿真完成,在输出结果界面中找到仿真数据,得到AK-PET旋耕工况下需求车速与实际车速对比图如图10所示。从图10中可以看出,需求车速与实际车速误差的平均值为0.10 km/h,说明实际旋耕速度较好地跟随工况中的需求车速。
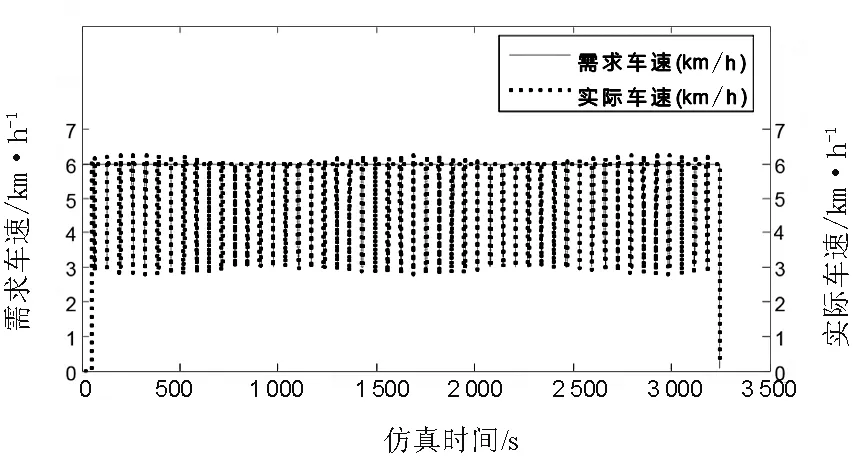
图10 AK-PET旋耕工况下理想车速与实际车速对比图Fig.10 Comparison chart of required speed and actual speed of AK-PET under rotary tillage
图11所示为旋耕工况下AK-PET动力电池SOC变化曲线,在完成0.625 hm2地的连续旋耕作业以后,用时3 250 s,动力电池SOC值由初始的95%降低到了81.47%,整个电池工作状态较为平稳。

图11 旋耕工况下AK-PET动力电池SOC变化曲线Fig.11 SOC curve of AK-PET batteries under rotary tillage
图12所示为旋耕工况下AK-PET驱动电机转速与转矩输出曲线,驱动电机转速集中在[1 180,2 468] r/min之间,这个转速基本处于“低速恒转矩”输出阶段,与设计初的期望一致。电机的转矩也在34.07~57.95 N·m之间变化,低于额定转矩60 N·m,均与设计初的期望一致。说明所选型驱动电机能够胜任当前的旋耕工作,不存在过载的情况。
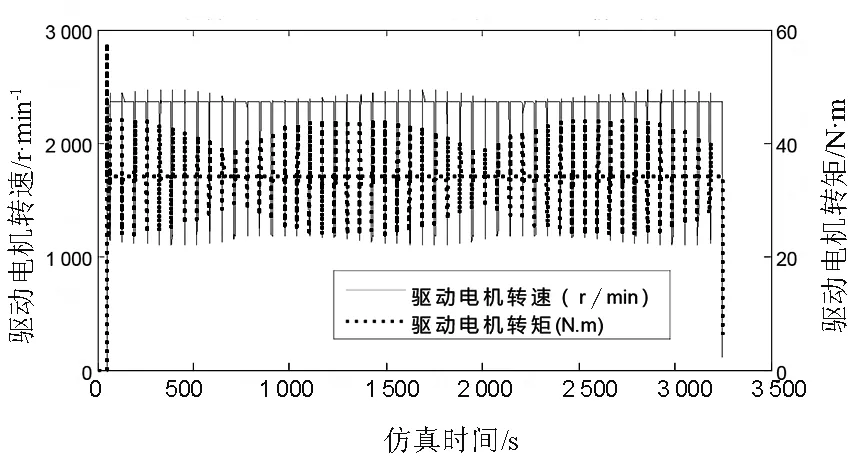
图12 旋耕工况下AK-PET驱动电机转速与扭矩输出曲线Fig.12 Speed and torque output curve of AK-PET motor under rotary tillage
图13所示为旋耕工况下AK-PET驱动电机功率与效率输出曲线,驱动电机输出功率最大值为11.8 kW,平均值为9.63 kW,而驱动电机的额定功率为15 kW,不存在过载现象;效率的平均值为0.859,说明驱动电机的工作状态良好,处于高效区域。
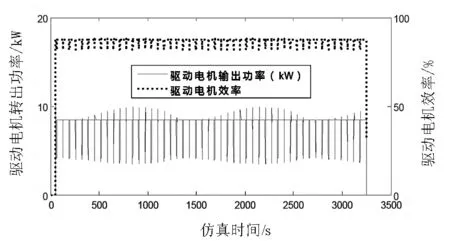
图13 旋耕工况下AK-PET驱动电机功率与效率输出曲线Fig.13 Power and efficiency output curve of AK-PET motor under rotary tillage
我们前期在Matlab中通过编写M文件的方式,也分析了纯电动拖拉机的作业性能[12-13]。旋耕工况采用6 km/h的等速工况,运输工况采用24 km/h的等速工况。两种仿真环境下得到的主要性能参数对比见表2。
表2 两种仿真环境下拖拉机主要参数对比
Tab.2 Comparison of the main parameters of tractors in two simulation environments

环境指标旋耕工况运输工况作业时间/h最高作业速度/km·h-1平均滑转率最大牵引力/N作业时间/h最高作业速度/km·h-1平均滑转率最大牵引力/NMATLAB4.297.230.155 366 0006.66 41.490.005 76 758.05CRUISE4.516.890.166 595 8756.54400.006 86 619.46偏差/%4.884.936.742.131.843.7316.182.09
从表2中看出,两种环境下,得到的主要指标除了滑转率偏差超出了5%以外,其它偏差都在5%以内。主要原因在于用MATLAB分析时,作业工况均采用了等速工况代替,未考虑加减速对电池SOC变化的影响及驱动电机的动态特性输出等原因,造成了MATLAB中预测的指标与CRUISE中的预测指标的差异。而MATLAB中编写的专用分析程序也存在着功能单一,忽略了部分影响因素如温度、动载荷变化、制动系统对车速的影响等问题,与商业化CRUISE软件相比存在着不足之处,但二者结果相互印证,也证明了本文CRUISE软件仿真模型建立的准确性。
5 结论
(1)本文根据拖拉机实际作业工况制定了旋耕工况和运输工况,绘制了两种工况下的速度曲线,为拖拉机的动态性能研究提供了良好的工况信号借鉴。但随着作物耕作技术的发展,更多的作业工况例如深松、开沟等有待研究,以更全面地分析研究拖拉机的作业性能。
(2)基于CRUISE软件搭建了AK-PET的仿真平台。仿真实验结果表明,在两种工况下,AK-PET均能够紧密跟随工况车速,其电机的输出转速、扭矩、功率等均在电机MAP图特性范围内,滑转率平均值均控制在0.17以下,表明所研发的拖拉机适用于这两种工况。
(3)文中基于CRUISE搭建的AK-PET仿真平台仿真方式多样,监测数据全面,优于我们在MATLAB中通过M文件编写的仿真程序,为后期AK-PET参数优化匹配、电池管理系统研究、制动系统能量回收策略研究、电机控制策略制定、整车控制策略开发等工作都提供了良好的平台。
