防空制导炮弹的指令控制模式分析
2019-12-10姚鸿鹤卢发兴许俊飞
姚鸿鹤,卢发兴,许俊飞
(海军工程大学兵器工程学院,湖北 武汉 430033)
指令制导弹上设备少、重量轻的优点使其成为用于近程防空的防空制导炮弹优先选择的制导方式[1-3],根据控制指令形成方式的不同,指令制导又可以分为多种指令控制模式,不同的模式,其制导系统的组成有差异,对系统各环节的精度要求也不同,因此开展指令控制模式的研究是一个亟待解决的问题,这对防空制导炮弹指令控制模式的选择具有重要意义。
制导精度是影响指令控制模式选择的重要因素,而制导精度主要与跟踪雷达、惯导器件、数据链等硬件设备的精度紧密相关。近年来,国内外学者对相关问题做了如下研究:文献[4]对精密跟踪设备的跟踪精度进行了建模分析,介绍了国内外跟踪雷达系统的性能指标;文献[5]研究了指令制导系统中,目标、导弹跟踪设备的系统误差和随机误差,并对其进行了仿真分析;文献[6]针对传统的指令制导方式,对指令的制导回路以及指令的形成和控制原理进行了研究;文献[7-8]对制导系统中各误差源的随机误差进行了建模,并运用伴随法分析了各误差对制导系统制导精度的影响;文献[9-10]分别研究了角速度零位误差和随机风误差对比例导引制导率制导精度的影响,并对复杂的制导回路进行了分析;文献[11]以某型导弹为例,分析了目标跟踪误差和惯导设备误差对导弹制导精度的影响,并提出了一种分析导弹制导系统硬件设备精度要求的方法。可见上述文献主要针对制导系统误差、制导精度以及制导系统硬件设备的精度开展研究,但从指令控制模式选择的角度,对在不同条件下哪种模式更为合适的问题并未做深入研究。
针对以上问题,本文对指令控制模式中涉及的误差进行了建模,并运用蒙特卡洛打靶法分析了不同模式中各误差对制导精度的影响,初步得到了各指令控制模式的适用条件。
1 指令控制模式分析
指令制导系统是以防空制导炮弹为控制对象的闭环回路,图1给出了指令制导回路[6]的框图。

图1 指令制导回路
根据炮弹运动参数的获取方式以及指令形成装置的载体的不同,采用指令制导的防空制导炮弹的指令控制模式一般分为6种,如图2所示。
记6种指令控制模式分别为Ⅰ型、Ⅱ型、Ⅲ型、Ⅳ型、Ⅴ型、Ⅵ型。其中,Ⅰ型、Ⅱ型、Ⅲ型的指令形成装置安装在弹体上,Ⅳ型、Ⅴ型、Ⅵ型是在舰面制导站形成控制指令,然后由指令发射装置向炮弹发送指令来控制炮弹飞行。但对于炮弹运动参数的获取,Ⅰ型和Ⅳ型通过融合炮弹惯导设备和炮弹跟踪设备提供的炮弹运动参数来得到;Ⅱ型和Ⅴ型通过炮弹惯导设备提供的炮弹运动参数来得到;Ⅲ型和Ⅵ型则通过炮弹跟踪设备提供的炮弹运动参数来得到。

图2 防空制导炮弹指令控制模式
2 误差模型
误差是影响防空制导炮弹制导精度的主要影响因素,在炮弹制导过程中,误差源主要有目标跟踪设备误差、炮弹运动参数获取设备误差、指令延迟误差、起控点散布误差和大气扰动误差等[3,11]。为方便分析问题,本文只分析6种指令控制模式涉及的误差,包括目标跟踪误差、炮弹定位误差、惯导设备误差、起控点散布误差及延时误差,且在发射坐标系下建立误差模型。
2.1 目标观测误差模型
现役的武器装备中,雷达是主要的观测设备,首先建立发射坐标系OXYZ,如图3所示,O为炮弹的发射原点,OX轴在水平面内,指向水平面内某一指定方向,OY轴垂直于当地水平面向上,OZ与OX、OY轴构成右手系。
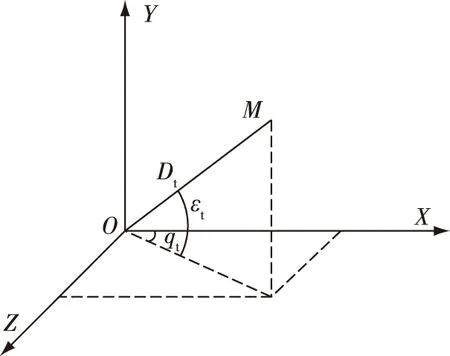
图3 球坐标向发射坐标系转换
图3中,M点为目标,Dt、εt、qt为目标的距离、高低角、方位角。


(1)
2.2 惯导设备的误差模型
惯导设备的定位误差主要是陀螺和加速度计的漂移造成的,陀螺和加速度计的漂移又可分为常值漂移和随机漂移[13]。
对于常值漂移,可以用误差累计的速率来表征惯导设备定位性能的优劣[11],则惯导设备的常值漂移造成的定位误差δg=[ΔgxΔgyΔgz]可表示为
(2)

对于随机漂移,假设漂移量δn=[ΔnxΔnyΔnx]为平稳随机过程,其特性可以用一维指数型的自相关函数来表示[7]
(3)
式中,σni为随机漂移造成的误差均方差;pi为自相关系数。
有色噪声可以用一个功率谱为φni的高斯白噪声通过一个传递函数为Hi(s)的成形滤波器来表示,经过数学推导可得[10]
(4)
将常值漂移和随机漂移用方和根法合成得到惯导设备误差δgn,有
(5)
2.3 起控点散布误差模型
起控点散布误差主要是由于初始段扰动导致的[14],一般情况下,可以用服从正态分布的随机变量来表示,即
(6)
式中,δr为起控点散布误差;μ为起控点散布误差的数学期望;σr为起控点散布误差的均方差;xj为正态分布的随机数,即xj~N(0,1)。
2.4 延时模型
制导系统中的延时环节是不可避免存在的,它们也是影响防空制导炮弹制导精度的重要因素[15],在本文分析的这6种制导模式中,涉及的主要延时有
1)制导指令由舰面制导站形成,然后发送到弹上而产生的指令传输延时T1;
2)炮弹的惯导设备测得的炮弹运动参数需要发送到舰面制导站而产生的数据链传输延时T2;
3)炮弹和目标跟踪设备测得的运动参数需要发送到弹上而产生的数据链传输延时T3、T4。
假设舰面制导站向弹体发送的制导指令为N,惯导设备、炮弹和目标跟踪设备提供的炮弹运动参数分别为M1、M2、M3(包括炮弹位置、速度等运动要素),建立延时模型,有

(7)
各指令控制模式涉及的延时如表1所示。

表1 不同指令控制模式的延时
2.5 炮弹定位误差模型
炮弹主要通过炮弹跟踪设备、惯导设备或两者信息融合实现定位,要建立炮弹定位误差模型,首先要对炮弹跟踪设备的观测误差进行建模,其原理与目标跟踪设备相同,这里不在赘述,直接给出炮弹跟踪设备的观测误差模型,有

(8)
(9)

其次,建立惯导设备误差模型,如上文所示。
最后,针对六种指令控制模式中炮弹定位的特点建立炮弹定位误差模型。记δp为炮弹定位误差,I型和IV型中需要根据误差融合模型[16]建立炮弹定位误差模型,有

(10)
式中,l=1,2,3。
Ⅱ型和Ⅴ型中炮弹定位误差模型与惯导设备的误差模型相同,即
δp=δgn
(11)
Ⅲ型和Ⅵ型中炮弹定位误差模型与炮弹跟踪设备的误差模型相同,即
δp=δm
(12)
3 误差对制导精度影响模型
蒙特卡洛法(Monte Carlo)、协方差分析函数描述法(CADET)、统计线性化伴随法(SLAM)是分析制导弹药制导精度的主要方法[17]。Monte Carlo法是一种统计实验法,它利用计算机数值模拟来代替具体实验,通过多次模拟打靶仿真研究系统统计意义下的特性,因此相对于其他两种方法,Monte Carlo法的计算结果更为稳定和精确[17]。因此本文应用蒙特卡洛打靶法建立误差对制导精度的影响模型。基本步骤如下:
1)建立弹道仿真模型
防空制导炮弹的弹道方程包括动力学方程、质心运动学方程、绕质心转动的刚体运动方程、坐标系转换方程及导引方程[18],假设炮弹采用比例导引制导律[10],其外弹道建模详见文献[18],文中不在赘述。
2)确定炮弹飞行过程中的随机干扰因素,确定其分布律
影响炮弹制导精度的随机干扰主要有三类:
第一类是炮弹结构参数误差,主要包括质量偏差Δm和质心偏差Δc;
第二类是发射过程中的干扰。主要包括发射仰角干扰Δε、发射方位角干扰Δβ、发射速度干扰ΔV、弹道倾角干扰Δθ、弹道偏角干扰Δψv、俯仰角干扰Δϑ、偏航角干扰Δψ、阻力系数干扰ΔCx、升力系数干扰ΔCy、侧力系数干扰ΔCz等;第三类是随机风的影响,随机风主要为弹道横风干扰ΔWz和弹道纵风干扰ΔWx。
以上随机干扰因素均服从正态分布,其变化范围如表2所示[14]。

表2 随机干扰变化范围
其中,第一类和第二类可通过调整模型参数和改变仿真初值来实现,但对于第三类随机干扰,首先将随机风与炮弹速度V合成得到炮弹的相对速度Vr,设炮弹速度在发射坐标系为V=(Vx,Vy,Vz),随机风速在发射坐标系为W=(ΔWx,0,ΔWz),则

(13)
式中,θr为相对弹道倾角;ψvr为相对弹道偏角。
然后利用Vr、θr、ψvr代替炮弹速度V、弹道倾角θ、弹道偏角ψv进行弹道仿真。
3)将随机干扰和第2节中的误差加到炮弹六自由度弹道仿真模型中(对于起控点散布误差,将其加到炮弹的起控距离上;对于延时误差,利用Simulink工具箱中的Variable Time Delay模块来实现),进行n次打靶实验,得到炮弹在发射坐标系的弹着点(x,y,z)样本(xk,yk,zk)和制导精度zm样本zmk。其中zmk的计算公式为

(14)
式中,(xtk,ytk,ztk)为仿真结束时目标在发射坐标系的位置,k=1,2,…n。
4)对蒙特卡洛打靶结果进行统计分析,计算zmk的数学期望,并将其作为炮弹的制导精度,即
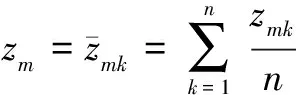
(15)
4 仿真分析
假设利用防空制导炮弹打击运动目标,且目标做匀速直线运动,初始位置为(15 000 m,20 m,0 m),速度为(-300 m/s,10 m/s,10 m/s),仿真步长取0.02 s,将每一时刻炮弹和目标的理想轨迹点作为其真实位置,仿真初始条件如表3所示[18]。
表3 仿真初始参数


表4 误差参数仿真初值
把各参数的中间取值定为基准值,即在每次计算中,参数中最多只有一个误差因素的初值取非基准值,而其他的参数均取基准值。
1)以Ⅰ型为例,当各参数取基准值时,炮弹弹着点分布情况如图4所示,制导精度分布图如图5所示;取制导时间T=12 s,Ⅰ~Ⅵ型制导精度随制导时间的变化曲线如图6所示。

图4 炮弹弹着点散布三维图
图5 制导精度分布图
图6 炮弹位置误差曲线
2)在给定初值条件下计算制导精度zm,结果如表5-7所示。

表5 各误差参数对制导精度的影响(Ⅰ型和Ⅳ型)

表6 各误差参数对制导精度的影响(Ⅱ型和Ⅴ型)

表7 各误差参数对制导精度的影响(Ⅲ型和Ⅵ型)
根据仿真结果可以得到以下结论:
1)蒙特卡洛打靶结果表明,炮弹弹着点随机分布,且无异常落点,制导精度近似满足正态分布,从而验证了本文采用蒙特卡洛打靶法建立的误差对制导精度影响模型的正确性;
2)在6种指令控制模式中,炮弹位置误差随制导时间的增大而增大,且任意一个误差参数增大(减小),炮弹位置误差也随之增大(减小);
3)对6种不同的指令控制模式比较可得出,延时对指令在舰面形成的Ⅳ型、Ⅴ型、Ⅵ型影响较大,尤其是对Ⅳ型、V型,这是由于在Ⅳ型和Ⅴ型中,既存在指令传输延时,又存在炮弹和目标运动信息的传输延时。因此在数据链性能较好时,可优先考虑采用Ⅳ型、Ⅴ型、Ⅵ型,较差时,则应优先考虑采用Ⅰ型、Ⅱ型、Ⅲ型;
4)当炮弹跟踪设备精度较低或惯导设备的漂移较大时,Ⅰ型和Ⅳ型的制导精度明显高于Ⅱ型、Ⅲ型、Ⅴ型和Ⅵ型,即当炮弹采用跟踪雷达和惯导设备融合定位的方式时,制导精度会明显提高。但当炮弹跟踪设备精度较高或惯导设备的漂移较小时,I型和Ⅳ型制导精度提高的相对较小,因此从成本考虑,此时Ⅱ型、Ⅲ型、Ⅴ型和Ⅵ型较为合适。
5 结束语
本文从制导精度出发,对防空制导炮弹的6种不同的指令控制模式进行了分析。根据指令控制模式的特点,建立了误差分析模型,并基于典型的误差参数,通过仿真详细研究了6种指令控制模式下误差对制导精度的影响,初步得到了各指令控制模式的适用情况。该分析方法能为不同条件下防空制导炮弹指令控制模式的选择提供依据,具有一定的工程应用价值。
