无人机蜂群对海作战威胁分析
2019-12-10李元锋
黄 勇,王 越,李元锋,张 枣
(中国人民解放军31002部队,北京 100089)
随着信息化、智能化、无人化技术的迅猛发展,世界各国在陆、海、空、天等各领域大力强化无人作战体系建设,新型无人作战平台和无人作战样式不断涌现。近年来,作为美军分布式作战典型代表的无人机蜂群作战更是引起世界广泛关注,成为无人机作战发展的重要方向。无人机蜂群作战是指具备一定自主能力的小型无人机,依据作战任务自行编组,形成作战集群,分布式协同对敌实施侦察或发起攻击的一种作战方法。该战法是一种看似随机,实则有序的协同作战方法,其核心是以小以量取胜、分布协同取胜,首要攻击目标为大型水面舰船,已成为突击大型水面舰船的新型“杀手锏”,一是因为该类目标体积大、价值高、机动性差,是合适的“靶目标”;二是因为舰载防空系统主要是针对各类反舰导弹和飞机,应对“低慢小”目标能力有限。
美海军早在2012年便探讨了无人机蜂群在未来对海作战中的可行性,并以多架无人机对一艘“宙斯盾”导弹驱逐舰攻击为例,实验验证了该战法[1]。目前,美军正大力推进以“小精灵”项目、进攻性蜂群使能战术项目、“山鹑”项目等为代表的蜂群作战关键技术研究和战法论证工作,以期加快推动蜂群作战的实战化运用[2]。国内对蜂群作战的研究起步较晚,但进展迅速,工程实践和理论研究均取得了相关成果。工程实践方面,相关单位成功进行了不同规模无人机集群飞行的演示验证[3];理论研究方面,现有文献侧重在对蜂群作战的概念研究、特点分析和态势感知、任务规划、协同控制等关键技术的研究[4],但少有针对蜂群作战的仿真实验和分析。本文在分析“宙斯盾”导弹驱逐舰防空作战流程的基础上,选取无人机蜂群对海作战威胁关键影响因素,设计仿真实验流程,构建仿真系统原型,实现无人机蜂群对海作战的威胁分析,以便指挥员据此快速反应形成应对举措。
1 威胁影响因素选取
本文以“宙斯盾”导弹驱逐舰为例,其防空作战流程如图1所示[5],该图描述了各系统与作战活动的关系,以及系统间的信息流向。对空探测系统负责空中目标搜索、跟踪、类型识别和敌我识别,并将目标识别信息传递给指挥决策系统和警戒系统,将目标跟踪数据传递给指挥决策系统和武器控制系统。指挥决策系统负责确定敌目标数量、优先级,定下交战决心,创建驱逐舰周围环境作战态势,并将作战态势传递给显示系统。作战人员与显示系统进行交互,并将指令通过显示系统传递给指挥决策系统,若指挥决策系统收到的指令中包含交战命令,则将交战命令、目标优先级传递给武器控制系统。武器控制系统根据收到的交战命令、目标优先级进行计划交战和评估交战,并将计划交战形成的目标分配和瞬时交战时机两类信息连同跟踪数据传递给交战系统,交战系统传回交战意图后负责对目标进行打击。警戒系统负责将目标击中驱逐舰或在驱逐舰周围爆炸的概率降至最低。

图1 “宙斯盾”导弹驱逐舰防空作战流程

图2 仿真实验流程
从上述防空作战流程可以看出,无人机蜂群对舰船形成的威胁程度主要取决于舰船能否在最短的时间探测到无人机,并对其稳定跟踪,继而对其开火实施有效杀伤。因舰船同时稳定跟踪或开火拦截的无人机数量有限,故无人机蜂群规模是舰船所受威胁的一个重要影响因素。同时,围绕舰船对无人机探测跟踪和有效杀伤的能力作进一步分解,可得无人机属性(包括雷达散射截面积、速度、光学特性、电子特性)、舰载对空探测传感器属性、舰载防空武器属性、海上可见性、海况等关键影响因素[6]。若舰船航行于狭窄海峡,舰船易遭受来自陆基发射平台的蜂群攻击且机动范围受限,故将舰船离岸距离亦视为关键影响因素。
2 仿真实验流程设计
无人机蜂群对海作战的仿真实验流程如图2所示[7]。从左侧开始,从输入数据库中读取将要生成的无人机数量、无人机与“宙斯盾”舰的初始距离。每次仿真运行依据探测概率Pd确定每架无人机是否被探测到,以及被探测到的时间。Pd取决于传感器属性、无人机与“宙斯盾”舰实时距离、海上可见性。无人机群进入“宙斯盾”舰Mk45舰炮、Mk15密集阵、Mk38机关炮三类舰载武器的交战区(WEZ)范围内,每类武器便会在合适的开火时机持续对无人机开火,在火力重叠区,上述三类武器均可开火。仿真根据各类武器的杀伤概率PK确定每架无人机是否被击落,以及被击落的时间。PK取决于武器属性、无人机与“宙斯盾”舰距离、海况。若所有无人机被摧毁,或某架无人机到达“宙斯盾”舰,一次仿真结束。每次仿真结束,将在输出文件中记录结束条件,进入下一次运行。
3 仿真实验关键数学模型
3.1 雷达搜索与跟踪模型
对应图1中对空探测系统的目标搜索和跟踪功能,分别建立雷达的搜索模型和跟踪模型[8]。搜索模型见式(1),跟踪模型见式(2)~式(6)。
Sm=Sr+Damtanασ
(1)
式中,Sm为搜索雷达给出的目标位置;Sr为目标真实位置;Dam为目标与搜索雷达的距离;α为雷达搜索精度;σ为[-1, 1]之间服从正态分布的随机数。
雷达发现目标后,若满足以下条件,则满足雷达跟踪条件:
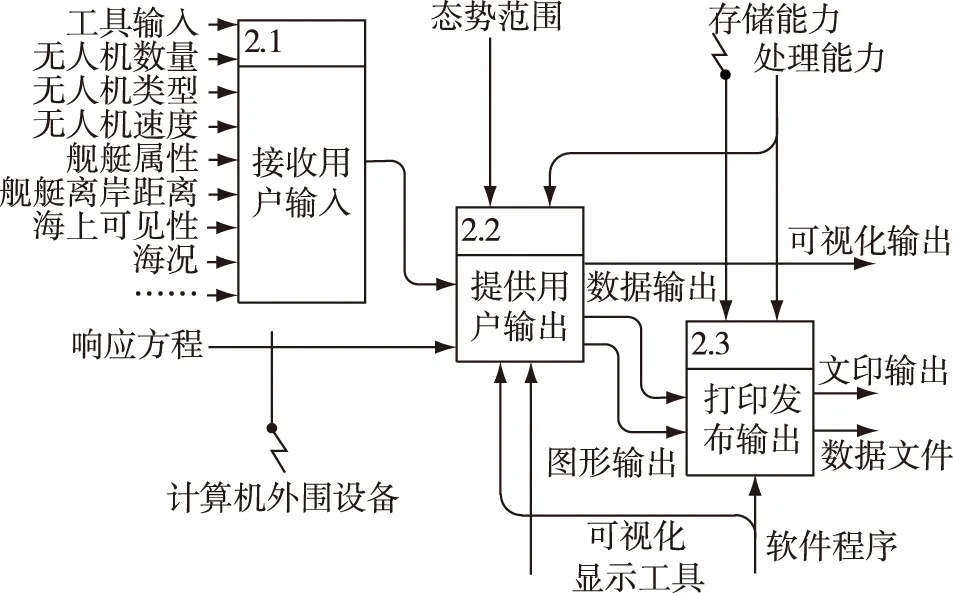
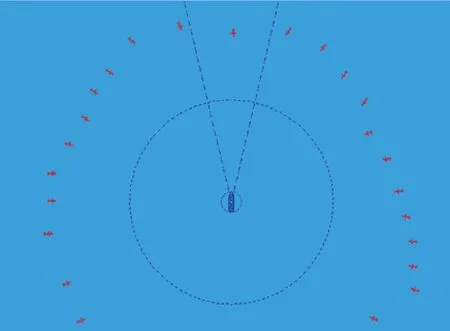
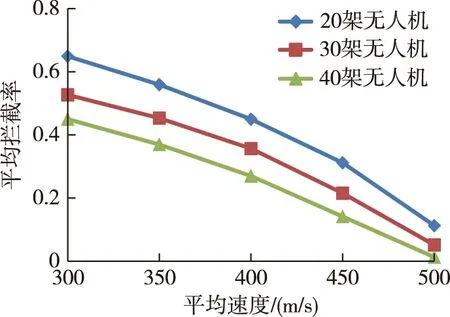
Dsmin (2) θsmin<θ<θsmax (3) |ψ|<ψsmax (4) (5) (6) 以舰载“密集阵”系统为代表,介绍舰载防空火力对无人机的命中概率模型,舰炮和机关炮的火力命中概率模型参照此模型。“密集阵”系统采用射击过程中不断修正的闭环火力控制模式,其弹丸在二维空间遵循正态分布,弹丸分布中心距目标中心的偏移δ为[9] δ=(ε2+ζ2+γ2)1/2 (7) 式中,ε、ζ、γ分别为“密集阵”系统的跟踪精度、火力系统精度、火控系统精度,各参数取值参见文献[9]。则“密集阵”系统在火力远界LY处的线量系统误差RY、在火力近界LJ处的线量系统误差RJ和平均线量系统误差R分别为: RY=LYtanδ (8) RJ=LJtanδ (9) R=(RY+RJ)/2 (10) 如图3所示,将小型无人机外形近似等效于两个相交的长方体,长为L,宽和高均为2d。采用“矩形目标、圆形散布”的模式进行命中概率解算,如图4所示,系统误差在x轴、y轴上的分量为Rx、Ry,r为密集阵武器系统弹丸散布半径,其值为 r=Dtanη (11) 式中,D为“密集阵”系统与目标的距离;η为“密集阵”系统的散布精度,取值1 mil。 图3 小型无人机外形等效图 图4 命中概率解算模式图 对小型无人机目标射击的单发命中概率P(x,y)为 (12) 继续以“密集阵”系统为例,说明武器系统开火时机。“密集阵”系统在蜂群无人机来袭过程中的拦截时间TL为 (13) 式中,LY和LJ分别为“密集阵”系统火力远界和近界,V无人机为无人机平均速度。 假设“密集阵”系统的最大连续开火时间为TLmax,则其最佳开火距离为 Lk=LJ+V无人机·TLmax (14) 当无人机相对于“密集阵”系统的距离D≤Lk时,“密集阵”系统具备最佳开火条件。由式(14)可知,最佳开火距离Lk与无人机平均速度V无人机有关,V无人机越大,Lk越大,故可能存在Lk>LY的情况。因此“密集阵”系统的最佳开火距离应为 Lkopt=min(Lk,LY) (15) 自上而下分解功能需求,系统主要包括无人机蜂群攻击建模和无人机蜂群威胁评估(GUI)两大模块,系统活动模型[10]如图5所示。无人机蜂群攻击建模包括离散事件建模仿真和结果统计分析,故需要离散建模软件和统计分析工具,输出为响应方程,并通过无人机蜂群威胁评估最终产生不同类型输出。无人机蜂群攻击建模、威胁评估活动模型分别如图6、图7所示。 图5 系统IDEF0 图6 无人机蜂群攻击建模IDEF0 图7 无人机蜂群威胁评估IDEF0 图8 仿真运行态势 仿真原型系统某时刻运行态势如图8所示。假设一定规模的蜂群无人机,按设定的航迹(坐标——高程——速度)从不同方向对“宙斯盾”舰发起自杀式攻击,“宙斯盾”舰利用舰炮、密集阵和机关炮等近防武器系统对其进行拦截。分析某一威胁因素对无人机拦截率的影响时,其他因素均一定。首先分析无人机数量和平均速度对拦截率的影响。分别设定蜂群无人机规模为20架、30架和40架,各仿真500次,统计无人机不同速度下“宙斯盾”舰的平均拦截率,结果如图9所示。可见,“宙斯盾”舰平均拦截率随无人机蜂群平均飞行速度的增加而减小,且平均速度越大,平均拦截率降低得越快;且平均拦截率随无人机规模的增大而降低。同理分析其他因素对“宙斯盾”舰拦截无人机数量的影响。综合各因素的影响,标准化效应的帕累托图[11]如图10所示,X轴为标准化效应的绝对值,并包含了一条Pareto值为1.97的参考线,对应95%的置信水平;Y轴反映了不同影响因素对“宙斯盾”舰拦截无人机数量的影响,可见蜂群无人机数量、无人机速度和舰船离岸距离是无人机蜂群形成对舰艇威胁的主要因素。图11所示的态势是综合考虑上述各因素并以热力图的形式反映了某时刻无人机蜂群对海作战的威胁,此刻越靠近黄色高亮区域的舰船受到的无人机蜂群威胁越大,越往外围的蓝色区域所受威胁越小。 图9 无人机蜂群规模和平均速度对拦截率的影响 图10 “宙斯盾”舰拦截无人机影响因素的标准化效应Pareto图 本文开展了无人机蜂群对海作战的威胁影响分析。基于以“宙斯盾”舰为代表的水面舰艇防空作战流程,分解细化出无人机蜂群对海作战的威胁影响因素,并通过设计仿真实验流程、构建仿真原型系统,实验分析了各威胁因素对水面舰艇拦截无人机蜂群效果的影响。结果表明:无人机数量、无人机速度和舰艇离岸距离是无人机蜂群对海作战的主要威胁因素。
3.2 火力命中概率模型




3.3 武器系统最佳开火时机
4 原型系统设计


5 实验分析

6 结束语
