TPU 柔性夹持器的设计与有限元分析
2019-12-05胡金洲杨铁牛杜华娜陈晓波刘乐章蓝键
胡金洲,杨铁牛,杜华娜,陈晓波,刘乐章,蓝键
(五邑大学 智能制造学部,广东 江门 529020)
夹持器类机构在传统数控机械加工、工业自动化机械手、医疗器械、车辆工程等制造业应用广泛. 夹持器主要由机械手和夹取物体的夹具两部分组成. 近几年,随着现代工业自动化水平的高速发展,对夹具的要求越来越高,而常见的机械式夹具由于效率不高,且容易对一些工件造成表面损伤,显然已经不能满足如今工业自动化的要求. 因此,设计一款能抓取不同形状且不损伤工件的柔性夹具就尤为重要. 夹具的柔性就是指夹具的适应性,夹具系统能够快速地适应不同几何形状物体的抓取要求,对外形不同的物体抓取需求能作出快速夹紧,以满足实际不同工况要求.
本文选择 TPU(Thermoplastic Urethane,TPU)材料并使用 3D 打印方式制作柔性夹具. TPU是一种超弹性体,由非晶体和长链分子组成,机械性能介于塑料和橡胶之间,属于非线性材料. 其弹性行为不同于金属,TPU 可以承受大弹性大变形而几乎不可压缩(只有少量的体积变化),其应力—应变关系表现出高度的非线性;优异的耐磨性能;TPU 具有良好的拉伸性,其拉伸强度是天然橡胶和合成橡胶的2~3 倍;TPU 耐油性能优异于丁睛橡胶,具有极好的耐油寿命;耐低温、耐候性、耐臭氧性能;TPU 的耐气候老化性能优天然橡胶和其他合成橡胶. 综上,TPU 是柔性夹具的优良材料.
本文根据货物分拣线实际情况设计柔性夹持器的结构方案及关键部件,通过 3D 打印的方式用TPU 材料制作柔性夹具,并对TPU 材料进行性能检测及单轴拉伸实验,得出其力学性能,最后对柔性夹具抓取工件时进行有限元分析,评估所设计柔性夹持器的结构合理性及柔性夹具拉伸极限,并进行柔性夹持器抓取物件的实验.
1 夹持器方案设计
货物分拣线是物流配送中心依据顾客的订单要求或配送计划,迅速、准确地将商品从其储位或其他区位拣取出来,并按一定的方式进行分类、集中的作业过程产线. 本文针对货物分拣线上小物件(最大外轮廓不超过150 mm 且重量不超过1 kg)的抓取要求,设计一种小功率夹持器. 鉴于市场需求及简便可靠性要求确定柔性夹持器为两爪式,柔性夹具分别有上下两个固定端,只有当这两个端点存在相对运动时,柔性夹具才会发生形变. 初步设计出柔性夹具如图1 所示.
拓扑优化是在给定设计域内对材料布局进行优化的一种数值方法,本文运用 ANSYS 拓扑优化设计对夹具进行外观优化及尺寸优化,过程如图2 所示.
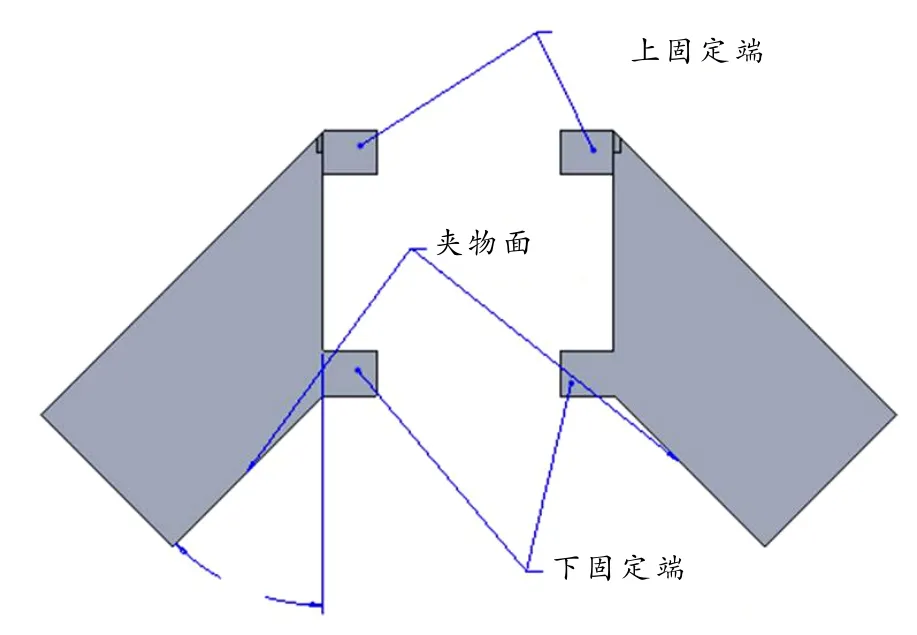
图1 柔性夹具初步设计图
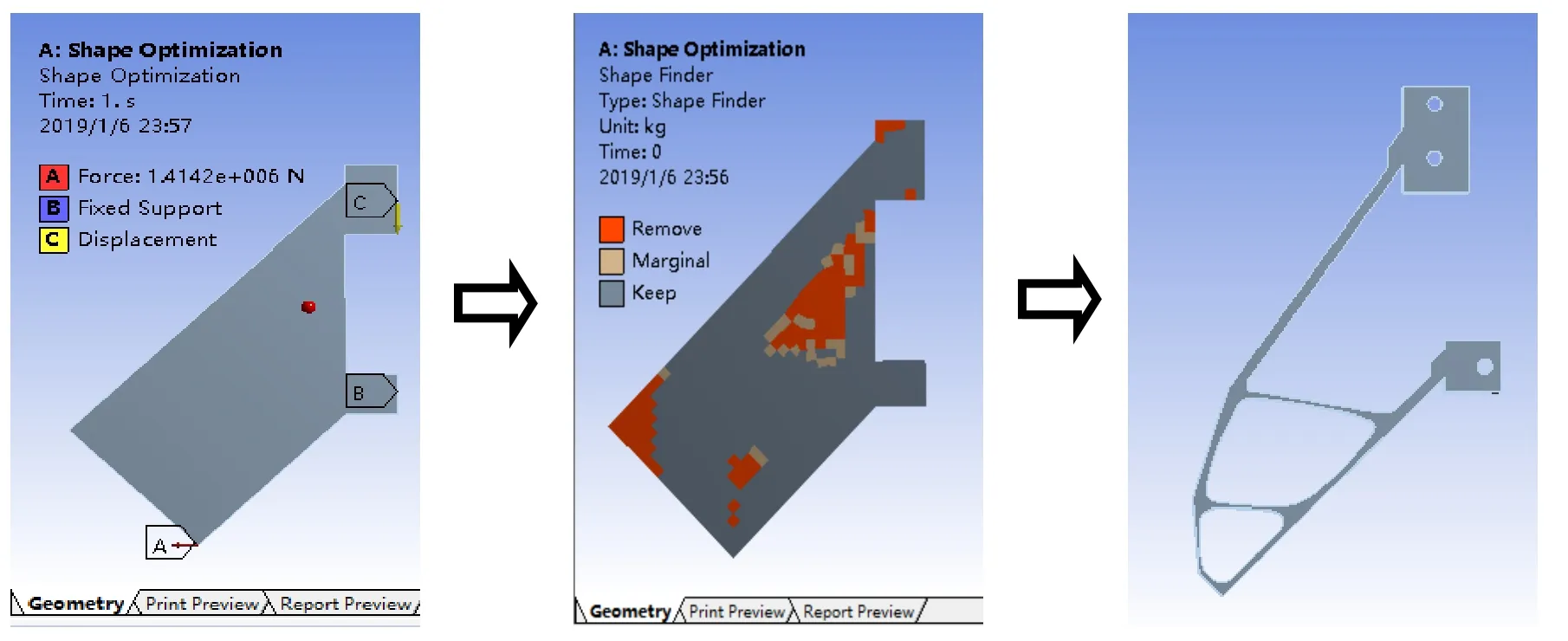
图2 拓扑优化过程图
最终优化结果如图 3 所示,上端点和下端点分别固定在有相对运动的机构上,抓取物件时,两个夹点向中间靠拢.
为了抓取货物分拣输送带上任意位置和方位的工件,夹持器选用 3 自由度机械手,结构如图 4 所示. 因为三轴机械手主要是参与流水线的工作,所以对其本身快速、精确的特点要求非常高,所以在材质方面主要采用钢性设计,这样可以在不停的工作中能够大大减少震动,延长其使用的寿命;三轴机械手前后、上下用汽缸驱动,手臂则采取高精密度线性滑轨,这样使得机械手不但稳定、噪音低、效率高,定位精确,而且非常耐热、耐磨. 其中 3 自由度分别是X 轴伸缩运动、Z 轴上下运动、 X 轴旋转运动.
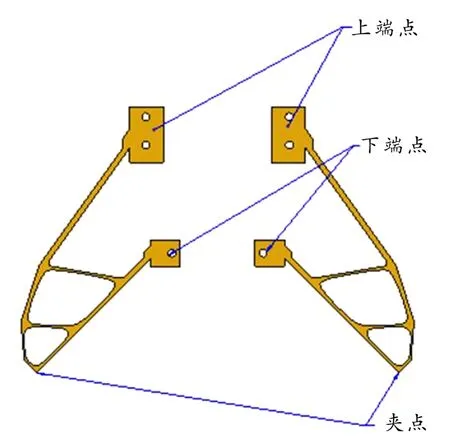
图3 柔性夹具结构图
夹持器的9 个重要零件如图5 所示,柔性夹具为夹持器核心部件,它的上下端分别通过螺栓固定在滑台气缸的缸体和滑块上,当滑台气缸被启动时,滑块下移带动固定的柔性夹具上端一起移动,此时柔性夹具的上端和下端发生相对运动,夹点向中间靠拢,从而达到抓取物体的目的,再配合 3自由度运动,则该柔性夹持器能够抓取输送带上任意位置和方位的工件.
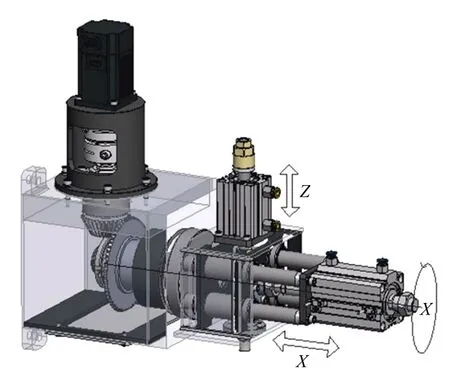
图4 三自由度机械手结构图
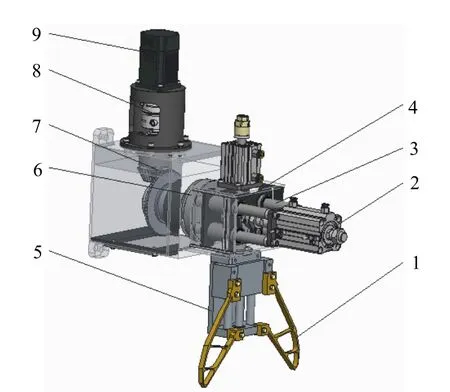
图5 柔性夹持器装配图
2 TPU 单轴拉伸测试实验
进行拉伸试验前,需要在相应软件上选取实验结果输出的参数及标准试样的各项具体参数、拉伸的速度和加速度、拉伸所需要力的大小等. 载荷—位移曲线图如图6 所示.
由上图可知,TPU 与线性材料碳素钢相比,其载荷位移曲线明显呈非线性,故弹性模量为变值;TPU 极限拉伸强度为34.8 MPa,故柔性夹具在抓取物体时其最大强度不得超过该数值.

图6 TPU 拉伸实验载荷-位移图
3 柔性夹具有限元分析
TPU 几乎不可压缩(只有少量的体积变化),其应力—应变关系表现出高度的非线性,非线性材料中的弹性恢复力主要来自非线性材料中熵的减少. 对非线性材料中分子链的长度、方向及结构的统计得到非线性材料的本构关系.
Mooney-Rivlin 本构模型的特殊形式可以设定某些参数为0 来得到. 如果所有 Cij等于0,则能够得到缩减多项式模型:
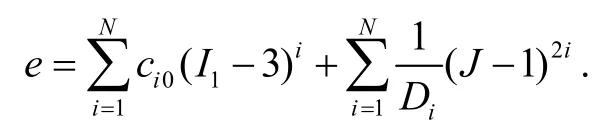
Mooney-Rivlin 模型能很好地描述TPU 材料的变形,在小应变范围内该模型具有很好地稳定性,在工程问题中作为常用模型,故以Mooney-Rivlin 模型作为本文计算方程.
3.1 定义材料属性
将单轴拉伸实验得出 TPU 实验数据添加到Table of Properties , 从Hyperelastic 超弹体下拉列表中选择Yeoh 3rd order 超弹性应变能密度函数,并运行最小二乘法曲线拟合程序[9],实验数据拟合如图7 所示.
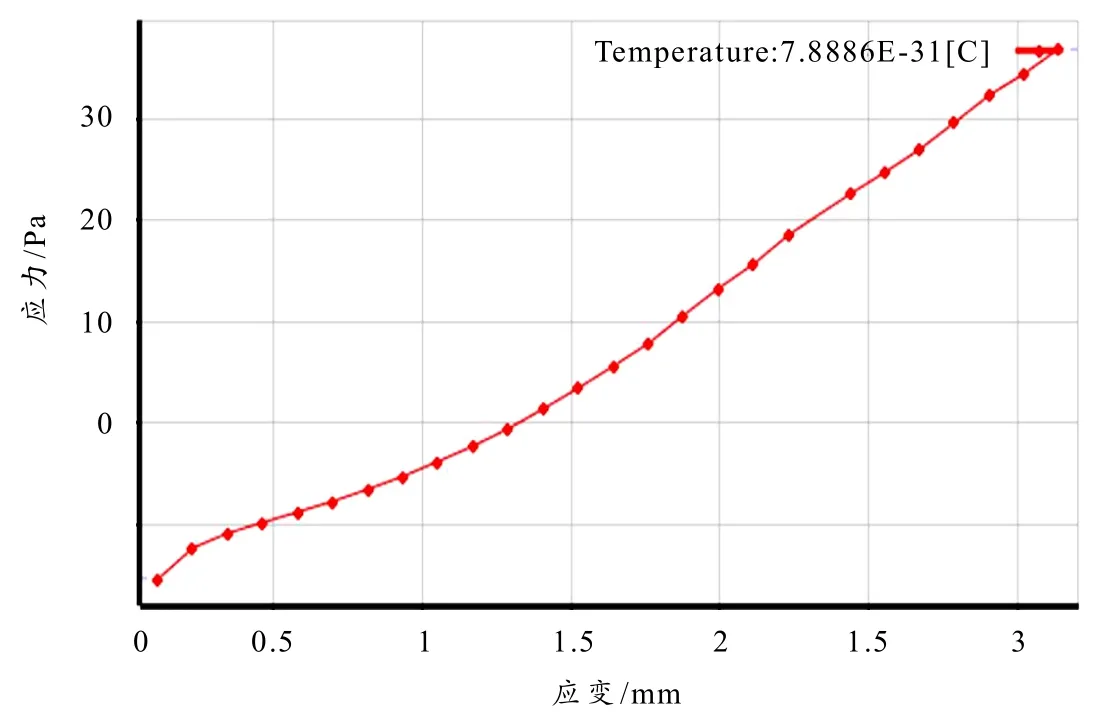
图7 实验数据拟合图
3.2 网格划分
对于有限元分析来说,网格划分是其中最关键的一个步骤,网格划分的好坏直接影响到计算的精度和速度. 本次柔夹网格划分节点281 306 个,单元60 160 个,平均网格质量 0.802,整体网格质量较优,可以满足基本要求.
3.3 载荷施加
加载约束,添加Fixed Support 固定约束作用对象为柔性夹具下端点,添加Diplacement 位移对象为柔性夹具下端点,方向竖直向下,加载位移量50 mm,添加重力加速度,方向竖直向下,如图8 所示.
3.4 求解结果
经求解得到柔性夹具Z 方向位移分布云图、夹具应变分布云图、夹具应力分布云图,如图 9所示.
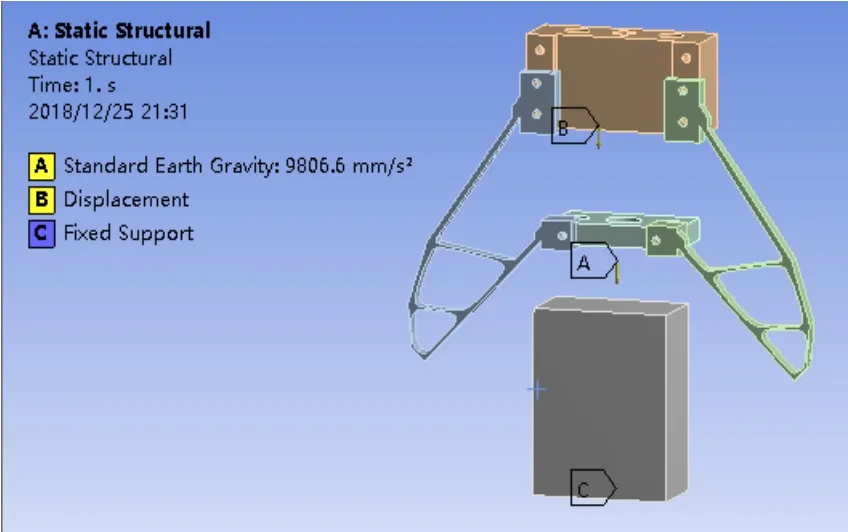
图8 约束加载图

图9 夹具位移、应变、应力分布云图
由上图可知,柔性夹具夹点Z 方向最大位移量d 为84.945 mm;最大应变量为0.041 mm,几何变形量很小基本可以忽略;最大应力值 1.175 × 10-4MPa (约为极限强度的 0.3 ×10-5%),远远低于 TPU的极限拉伸强度. 故该柔性夹具的应力、几何变形量均在安全范围内,由此也可以推断柔性夹持器满足基本的抓夹工件要求.
4 实验结果
为验证本文设计的柔性夹持器实际工作能力,进行模拟货物分拣流水线实际抓取货物实验,结果如图8 所示.

图10 柔性夹具夹取实物图
从图 10 可以看到,本文设计的柔性夹持器具有较强的兼容性,它能够轻松抓取外轮廓宽度在150 mm 以内且重量不超过1 kg 的物体,如抓取毛绒玩具、纸巾盒等柔软物体,也能抓取矿泉水水瓶等脆性物体,还能抓取表面喷漆的金属罐. 经观察,被抓取后的各类物件表面无损伤.
5 结论
以货物分拣为技术背景,本文设计了一种以TPU 为主要材料的柔性夹持器,并通过有限元仿真及模拟实验进行分析论证,柔性夹持器具有较好的兼容性,大大提高了工作效率,节约了成本,且该夹持器的夹具用柔性材料制作,对工件基本没有损伤,为同类机构设计提供了一定的参考.
