脑电波绘图机器人数据采集与控制算法研究
2019-12-04于洪波刘子昂隗立昂陈海峰张泽方刘学君
晏 涌,于洪波,刘子昂,隗立昂,陈海峰,张泽方,刘学君
(北京石油化工学院信息工程学院,北京 102617)
0 引言
脑电波活动与脑区域、脑状态有着密切的关系,是了解人脑信息处理过程的一种极为重要的形式。神经系统科学领域的专家们已经定义了人的情绪、精神状态及专注状态都受大脑前额处的皮质区域的控制[1]。人在主动思维或受到不同的感觉刺激时,能够产生特定模式的脑电波信号(electroencephalogram,EEG)[1]。脑电波信号可以根据频率不同而划分为Delta波、Theta波、Alpha波、Beta波、Gamma波等类型[2-3]。它们可以反映大脑的不同状态,并能够被实时地提取与分类,且记录简单、无创[4];再对其进行分析解读,进一步转化为相应的动作,即通常所说的用“意念”操控物体的基本原理[5],现今已成为热门研究方向。
脑-机接口(brain-computer interface,BCI)是不依赖于大脑外周神经与肌肉系统,在人脑和计算机或外部设备之间建立起来的一种通信系统[6-7]。本文利用脑-机接口实现脑电波数据的采集和传输。通过单片机对数据进行滤波算法处理、分析并实现对绘图机器人的控制。
1 总体设计方案
总体方案设计包括:脑电波采集模块、脑电波处理模块和上位PC机。其中,脑电波采集模块包括脑电波分析模块、主控单元、干电极、耳夹以及蓝牙模块,脑电波处理模块包括单片机、电机驱动模块、3个步进电机以及蓝牙模块。
通过干电极、耳夹采集人脑前额电压信号,利用脑电波分析模块对数据进行分析。通过蓝牙模块传输,再通过单片机进行数据滤波处理和阈值比较,提取关注度的相关信息并辅以眨眼信号,控制3个步进电机运动,实现对绘图机器人的控制。
系统总体结构如图1所示。
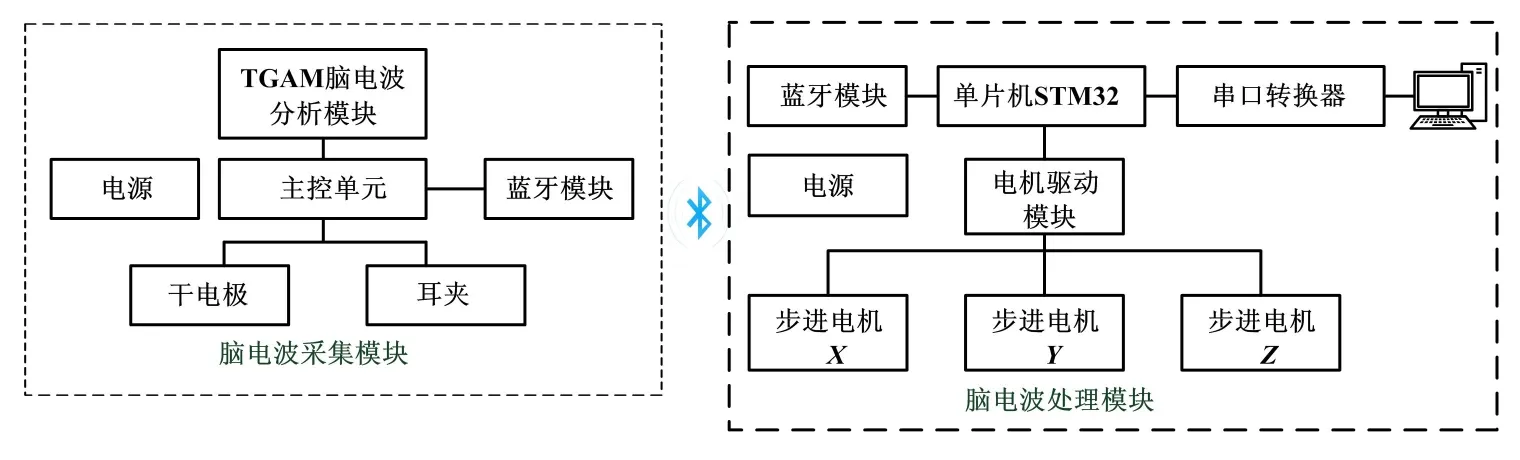
图1 系统总体结构图
2 系统硬件实现
2.1 脑电波芯片介绍
脑电波芯片(ThinkGear AM,TGAM)是美国神念科技公司(NeuroSky)开发的一款脑电波采集、处理模块,采用干电极传感器,能够实时监测额叶的脑波获得原始数据信号[8-10],处理和输出α、β等脑波波段数据以及专注度和放松度指数,并可侦测眨眼状态等。该模块采样率为512 Hz,频率范围为3~100 Hz,输出端口波特率设置为57 600 bit/s。
2.2 蓝牙模块介绍
采用蓝牙模块实现脑电波采集模块和脑电波处理模块之间的数据通信。蓝牙模块型号为HC-05,工作电压为3.3 V,内置2.4 GHz天线。串口通信波特率设置为57 600 bit/s,数据传输方式设定为8数据位、1停止位、0校验位。在AT模式下,将系统所用的两个蓝牙模块分别设置为主机模式和从机模式,两个蓝牙模块在上电后可以相互连接实现数据通信。
2.3 单片机
系统硬件核心控制平台采用STM32F429微处理器。该处理器采用ARM Cortex-M4处理器内核,带FPU功能,主频180 MHz,片内Flash为2 MB,片内SRAM大小为(256+4)KB,内置LCD-TFT显示控制器和DMA-2D图形加速卡。
2.4 多轨道参数导轨机器人
多轨道参数导轨机器人由三组互相垂直的导轨组成,如图2所示。
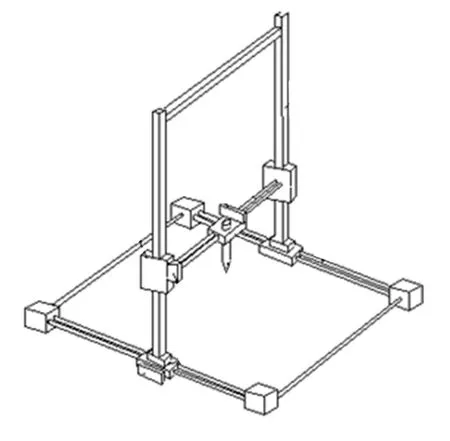
图2 多轨道参数导轨机器人
各导轨通过步进电机牵引实现移动,画笔被固定于水平导轨上,可以使画笔在三维空间中自由移动。
步进电机是借助电脉冲实现角位移的执行器件[11-12],具有转矩大、惯性小、响应频率高的特点。其瞬间启动及急速停止特性适合绘图要求。步进电机采用J-5718HB6401型号的步进电机,工作额定电流为4.0 A,相电阻1.1 Ω,工作时可保持转矩为3.6 N·m,步距角为1.8°。
采用M542H步进电机驱动模块控制电机的转动方向和运动速度,步进电机驱动采用256细分驱动,将原来的1.8°的步距角细分为0.42″,增加了步进电机的精确度,消除了电机的低频振荡,提高了电机的输出转矩、电机的分辨率、步距的均匀度,使画笔运动更平稳。
3 系统软件设计
3.1 蓝牙传输协议
通过蓝牙模块每秒发送513个数据包,分为小包数据和大包数据这2类小包数据协议。其中,前512个包是小包数据,每个小包包含了一个原始数据(Rawdata),可以根据解析算法从原始数据中可以获得眨眼数据。第513个包是大包数据,包含了专注度数据和放松度数据。每个数据包由包头部、有效负载及有效负载校检和三部分组成。TGAM模块脑电波信号结构如图3所示。
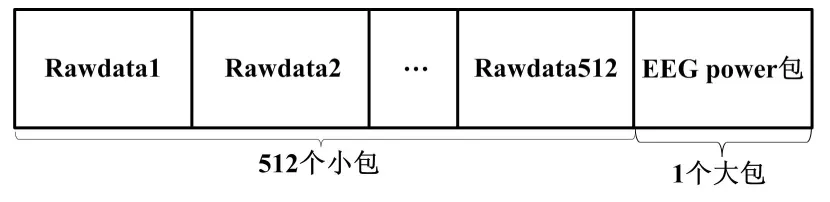
图3 TGAM模块脑电波信号结构图
512个小包数据,每个数据包8 B,小包数据协议见表1。
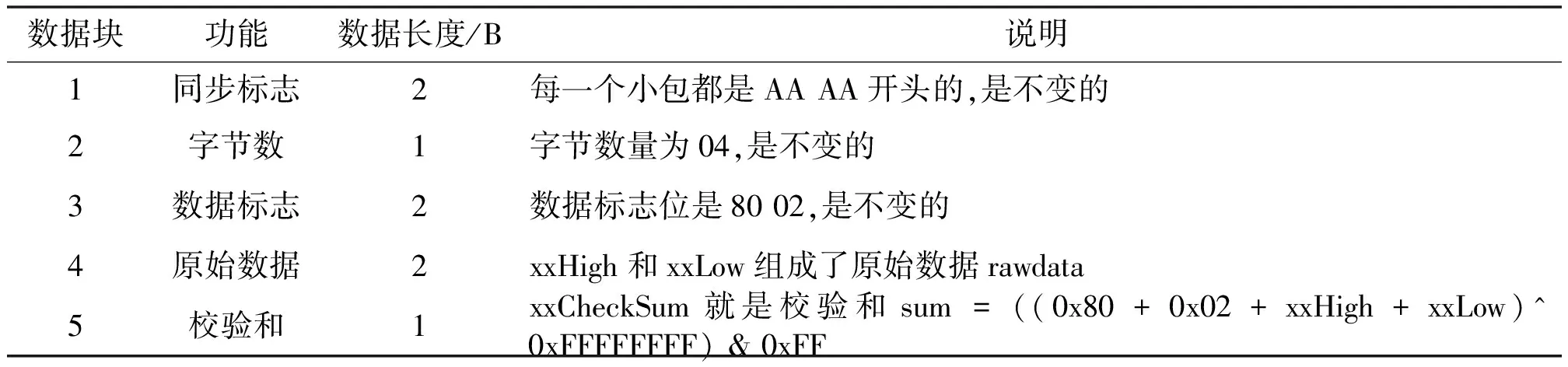
表1 小包数据协议
大包数据共36 B,含2 B同步标志、1 B说明有效字节数、32 B效数据、1 B校验。大包数据协议如表2所示。

表2 大包数据协议
表2中的EEG Power数据模块是由24 B组成的,每3 B为一组,包含采集到的脑波的δ、θ、α、β波。EEG power协议格式见表3。
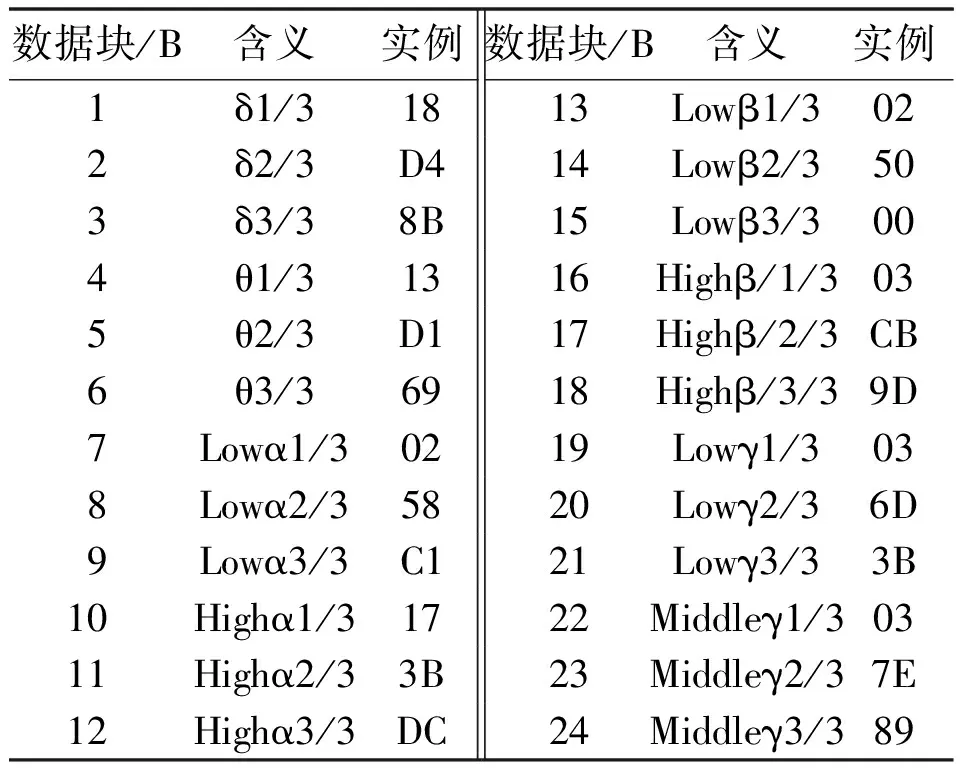
表3 EEG power协议格式
3.2 数据
基于上述分析,分别采集20名不同年龄的志愿者在专注、正常、放松状态下TGAM模块脑电波。
依据表2所示的数据格式,对专注度以及冥想度进行统计,如图4、图5所示。
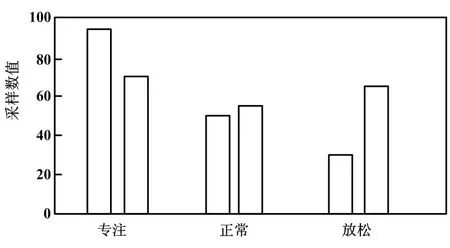
图4 专注度数据
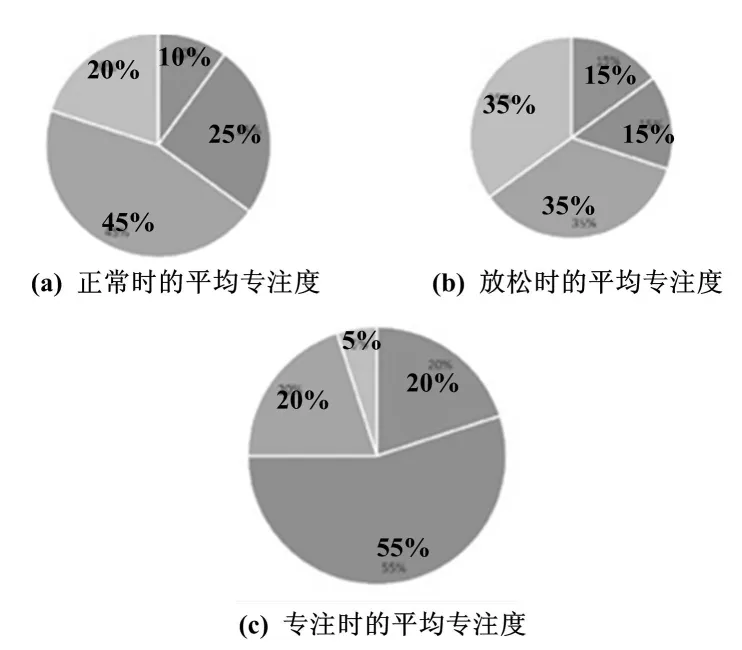
图5 冥想度数据
专注度以及冥想度数值为1~100,数值从小到大就是相对专注度(冥想度)的程度。专注情况下,专注度70~80以上占50%;放松情况下,专注度35~50以上占50%;正常情况下,专注度50~60以上占50%。通过这些数据,可以知道每个人做事的状态。若其工作状态时专注度很高,其做事效率一定不错;同理,在正常状态下,其专注度越高,越容易进入工作状态;而当其劳累时专注度越低其休息状态越好,进而可以很快恢复。
对采集到的眨眼情况下的多人的原始数据进行分析,发现虽然每个人眨眼的力度不同,但是眨眼对αl波、βh波的影响较大。因此,可以通过分析αl波、βh波的波动情况,来判定是否有眨眼动作的发生。。
3.3 数据滤波去噪算法
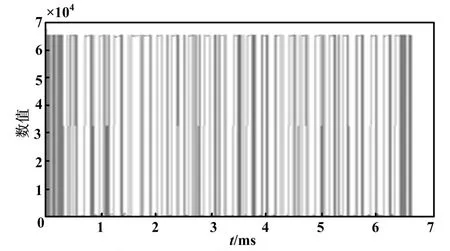
图6 试验采集小包数据图
图6中:每个波峰对应被测者一次眨眼时前额生物电的跳变,对多个样本眨眼信号波峰数值进行分析,以限幅滤波的方式剔除其中与眨眼信号无关的数据,滤波时设定每次采样允许最大偏差值记为A,每次采样后做如下判断[13-14]
(1)
式中:y(k)为第k步滤波值。
选取阈值为60 000,滤波后脑波数据如图7所示。
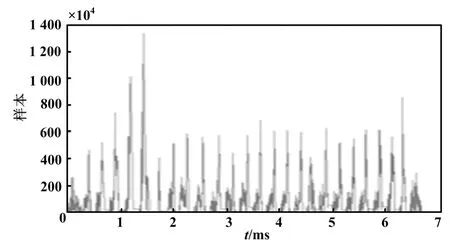
图7 滤波后脑波数据图
3.4 系统控制软件设计
脑波数据提取后,为了实现脑波信号控制绘图机器人的功能,基于核心控制板STM32F429设计了单片机端系统软件。
系统控制软件框图如图8所示。
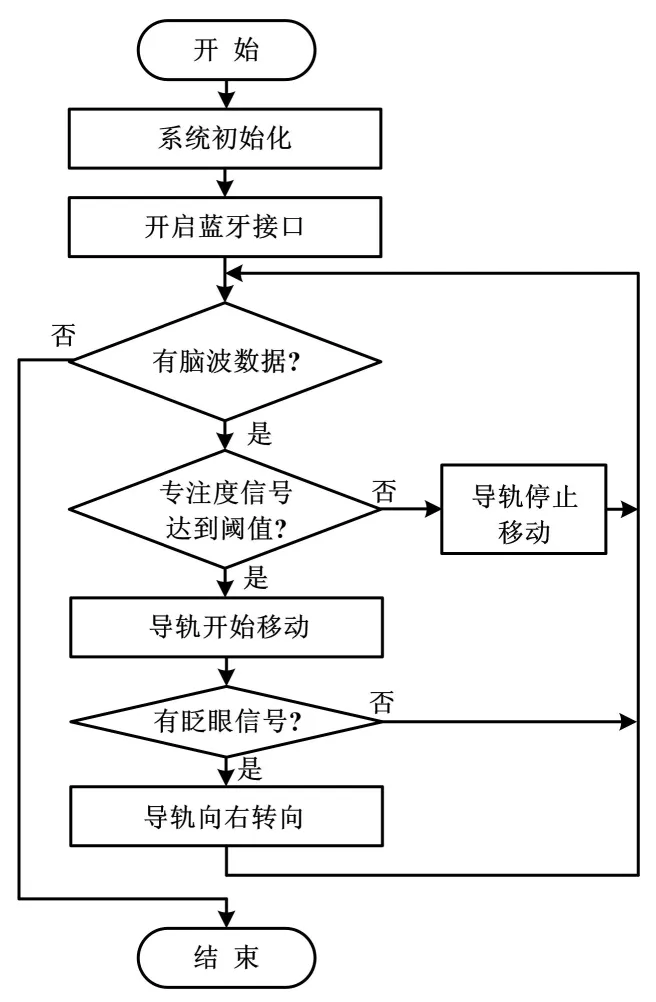
图8 系统控制软件框图
系统首先对各模块初始化,根据蓝牙传输协议,得到小包的原始数据和大包的专注度、冥想度数据。然后,检测被测者的专注度信号,选取60作为专注度信号阈值。若专注度超过阈值,则使导轨开始移动;若低于设定阈值时,则发送导轨停止信号,再次监测脑电波信号。其次,导轨运动方向通过使用者眨眼信号进行控制,分析小包数据得到眨眼信号波峰数值,再经过限幅滤波眨眼信号无关的数据,选取600作为眨眼数据信号阈值。当阈值大于600时,认为使用者有眨眼动作,导轨向右转向;若眨眼数据信号低于设定阈值,再次检测脑电波信号。
3.5 步进电机驱动器控制程序
脉冲宽度调制(pulse width modulation,PWM)是一种模拟控制方式,利用微处理器的数字信号对模拟电路进行控制,来实现晶体管或MOS管导通时间的改变。利用PWM波作为步进电机的驱动信号,来控制步进电机的运动。步进电机X用GPIOA6实现脉冲控制,GPIOA7实现方向控制;步进电机Y用GPIOB6实现脉冲控制,GPIOB7实现方向控制;步进电机Z用GPIOA4实现脉冲控制,GPIOA5实现方向控制。
以步进电机Z驱动器为例,其部分控制程序如下。
#define PULZ(a)if (a)
3)在整个教学过程中采用先虚后实、虚实融合的教学方法,既提高学生实物拆装的规范性,又提高教学实训设备的可重复利用率,节约了教学成本,达到高效教学的目的。
GPIO_ResetBits(GPIOA,GPIO_Pin_4);
else
GPIO_SetBits(GPIOA,GPIO_Pin_4)
#define DIRZ(a)if (a)
GPIO_ResetBits(GPIOA,GPIO_Pin_5);
else
GPIO_SetBits(GPIOA,GPIO_Pin_5)
void MOVEZ(int Z)
{
LENGTHZ=Z-LOCALZ;
if(LENGTHZ<0)
{DIRZ(0); LENGTHZ=-LENGTHZ;}
else DIRZ(1);
for(i=0;i { PULZ(1); Delay_us(500); PULZ(0); Delay_us(500); } LOCALZ=Z; } 结合PWM脉冲信号控制和256细分驱动控制,当测试者集中注意力,画笔开始运动,运动时测试者眨眼后1 s内画笔便执行转向操作。若测试者注意力下降,则画笔停止运动。绘图机器人步进电机移速均匀、平稳,实现了3维方向上的3 mm控制精度。 本文利用嵌入式微处理器和脑电波模块等器件设计,实现了脑电波绘图机器人数据采集与控制系统,并进行了控制算法的研究。系统通过TGAM脑电波模块获取脑波信号,通过蓝牙模块实现数据传输,并通过单片机程序对检测人专注度和眨眼动作的判断,对绘图机器人三个步进电机的进行精准控制,改变导轨三维移动状态及画笔运动控制,完成绘图功能。对采集到的数据进行分析,用于进行专注度训练,帮助高位截瘫病人或其他重症残疾人实现对智能设备的操控。4 结束语
