发动机振动与噪声成因与解决方法
2019-12-02于涛
于涛
摘要:由于汽油发动机的结构特性,以及剧烈燃烧不均匀等,导致在发动机运转带有劇烈振动与噪声,从而影响发动机运转的安全性与稳定性。据此,文章以无人机活塞式汽油发动机为例,基于不同结构形式发动机的振动与噪声成因进行详细分析,通过被动振动阻隔的方式设计发动机双层隔振系统,以此切实解决发动机振动与噪声问题,进而确保无人机的稳定、安全运转。
关键词:汽油发动机;振动;噪声;隔振系统
中图分类号:TPl8;TS51 文献标识码:A 文章编号:1001-5922(2019)10-0130-03
基于无人机活塞式汽油发动机,受自身结构与燃烧不均匀等要素的严重影响,使其在运作时带有剧烈振动。因此,不论是飞机还是汽车等既有成熟应用中,都会带有一定的减振隔振系统,以减少或消除振动影响m。
1发动机振动与噪声成因
无人机用汽油发动机结构形式主要有四种,即单缸发动机、对置双缸发动机、对置四缸发动机、直列双缸发动机。
1.1单缸发动机振动与噪声来源
对于活塞式汽油发动机振源分析,曲柄连杆的运动学和动力学分析是其重要前提条件。单缸发动机的振动和噪声出现主要是由于气压力与往复惯性力的影响,导致倾覆力矩发生扭振现象,再加上一阶与二阶往复惯性力、旋转惯性力等多重作用。而发动机往复惯性力太大,在高频状况下,更加严重,势必会导致严重失衡,进而恶化设备工况。
1.2对置双缸发动机振动与噪声来源
汽油发动机两个气缸基于空间位置相错开的关键优势是气缸轴线之间距离允许设计为最小状态,不必被缸体所影响,这样极易造成发动机缸体之间的惯性力矩大大缩减,以防止失衡。因为二冲程对置双缸发动机的两气缸同步点火,不存在角相位差,但是轴线之间存在180°的差异,一阶与二阶往复惯性力相等,方向也处于相反状态,不存在相位差,二者在发动机运行时彼此抵消。两气缸旋转惯性力也是如此。由于两气缸轴线无法完全重合,具有一定的轴间距,一阶与二阶往复惯性力与旋转惯性力将会形成偶矩。此外,对置双缸发动机的气缸轴线间距偏小,偶矩量值较小。
综上,对置双缸发动机振动与噪声的原因主要是,气压力与往复惯性力导致倾覆力矩扭振;不存在一阶与二阶往复惯性力和旋转惯性力;不存在一阶和二阶往复惯性力偶矩;旋转惯性力偶矩。
1.3对置四缸发动机振动与噪声来源
二冲程对置四缸发动机也可以说是两个双缸发动机沿着轴线彼此串联以此构成。其中后面的两个气缸点火的相位角和前面两个气缸间的差角是180°,曲轴旋转大约一周的状态,气缸就能完成两次性点火的任务。对置四缸发动机的全部气缸相关力都会在发动机运行过程中彼此抵消。此外,点火相位角存在角度差,两个气缸的力偶矩一直都是相同或者方向相反状态,都可彼此抵消。
综上,对置四缸发动机振动和噪声出现的主要原因是,气压力与往复惯性力造成倾覆力矩扭振现象;不存在一阶与二阶往复惯性力,旋转惯性力偶矩;不存在旋转惯性力偶矩。
1.4直列双缸发动机振动与噪声来源
直列双缸发动机是对置四缸发动机结构一侧。其前面与后面两气缸点火相位角的差异是180°,曲轴旋转一整周,气缸就会实现整个周期的两次点火。两气缸在相同一侧进行合理布局,但是点火相位角之间存在一定差距,且往复惯性力与旋转惯性力可抵消。就二阶往复惯性力来讲,两气缸是彼此叠加的状态。一般来说,直接双缸发动机远端气缸与固定基座的距离较远,这势必会导致基座承载力需求量增加,很容易影响机体结构与系统结构设计。
综上,直列双缸发动机振动与噪声的主要原因是,气压力与往复惯性力造成倾覆力矩扭振;不存在一阶往复惯性力和旋转惯性力;不存在往复惯性力;一阶往复惯性力偶矩与旋转惯性力偶矩超出对置双缸发动机;无二阶往复惯性力偶矩。
2发动机振动与噪声的解决方法
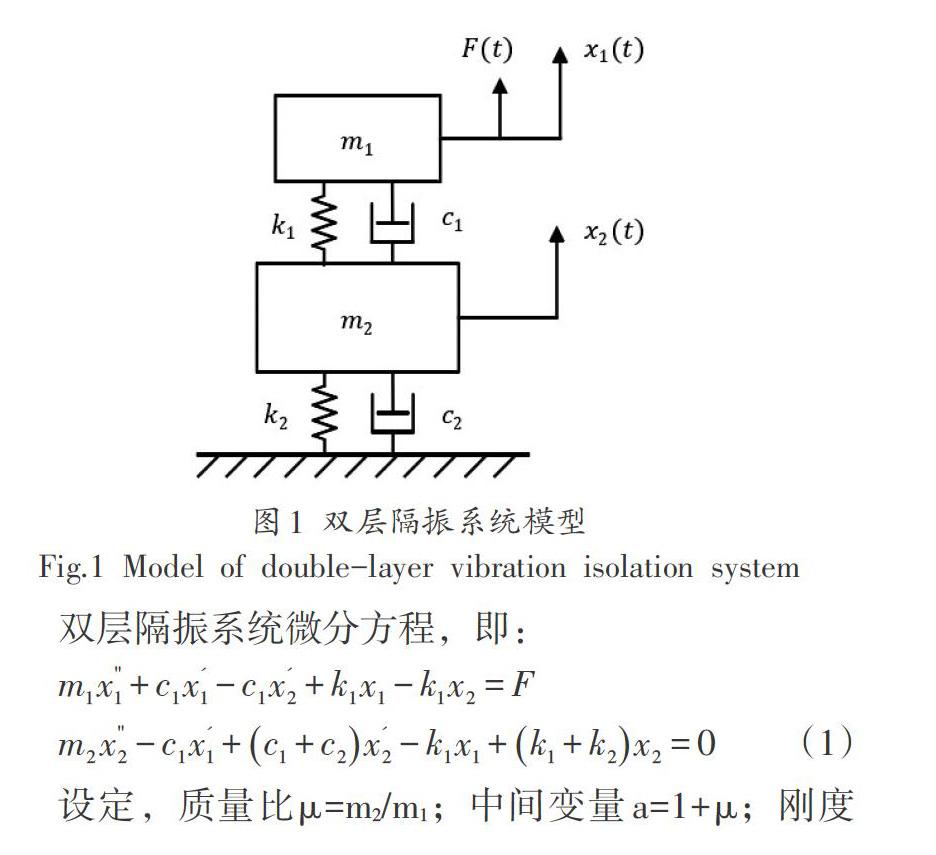
为有效解决发动机振动与噪声,本文进行了隔振系统设计。无人机活塞式汽油发动机在最大功率工作位置的振动中,一阶的振动频率是127Hz,已经处于高频的激振源状态了,其中占据比例最大是三阶振动频率,其是379Hz。通过文献资料发现,单层的隔振装置只能有效隔离低频域振动,但是在高频域振动合理中,效果并不显著。例如,衡量隔振效果的运动响应系数与绝对传递系数等智能在低频域振动隔离中利用。这主要是由于动力学微分方程模型的存在,隔振弹性元件由于其自身质量,在高频运行时,会出现驻波反应,从而影响隔振性能。但是,隔振材料刚度和频率之间并不存在关联性,通常情况下,在频率上升的时候,刚度也会不断增加,实际频率比也会按照相同的趋势逐渐变小。机体结构并非绝对刚体,受高频激振作用,难以忽略模型精确性的结构响应影响。为保证在高频激振状态下,发动机具有良好的隔振性能,选用双层隔振系统进行发动机隔振设计。双层隔振系统具体如图1所示。
双层隔振系统中已经把飞行器机体作为固定基座进行科学有效处理。而机体如果是运动零部件,需要进行处理,这样一来整个系统便会转变为三自由度模型,这样一来,势必会导致后续推导越来越复杂。因此,为了方便进一步计算与推导,在误差容许范围之内,把飞行器机体作为固定基座加以处理,双层隔振系统则退化成二自由度模型。
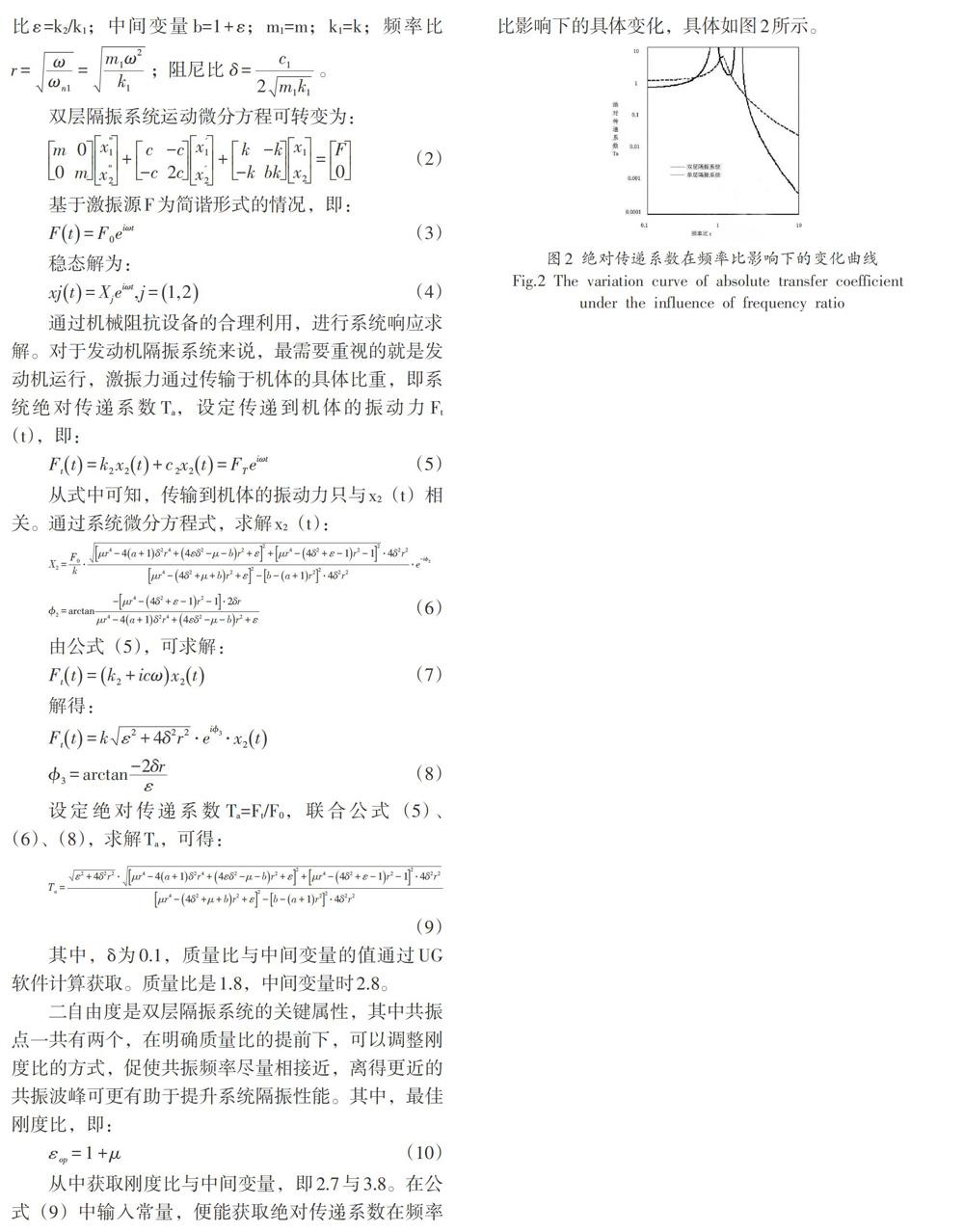
从图可知,对于双层隔振系统而言,其中出现了两次共振波峰,也就是阻尼条件相同时,此系统共振振幅相对较大。然而就隔振区域而言,即大于1.5时,双层隔振系统的绝对系数衰减速度却很快,这就在很大程度上提高了系统的高频隔振性能。
通过隔振系统,在发动机最大功率点时,发动机一阶激振源频率为127Hz,频率比为4.37,绝对传递系数为0.00552,就隔振系统而言,此预测结果与性能要求明确相符。
3结语
综上所述,无人机飞行控制器大部分都是选用惯性导航系统控制姿态,外部激振源会逐渐导致惯性测量单元的工作环境逐渐恶化,对控制的精确性造成直接性影响。对此,应针对特定的工况及其需求,进行隔振系统科学合理设计,降低振动与噪声成因的负面影响,进而解决发动机振动与噪声。文章根据实际情况进行隔振系统设计,以控制振动与噪声,系统具备良好的高频隔振性能,值得大力推广与应用。
