基于测量机器人的精密三角高程进行二等跨河水准测量的研究与应用
2019-12-02李鹏余锐秦亮军
李鹏,余锐,秦亮军
(广州城市规划勘测设计研究院,广州510060)
1 引言
跨河水准是测量控制网跨越江河水域进行精密高程传递的重要方法,主要方法有倾斜螺旋法、GPS 测量法、测距三角高程法等。GB/T 12897—2006《国家一、二等水准测量规范》[1]对跨河水准测量场地、观测方法、技术要求等均有严格的规定,确保高程传递的精确性和可靠性。
传统的测距三角高程法进行跨河水准作业时采用人工观测,劳动强度大、作业效率低下,且需要人工量取仪器高、棱镜高增加了人为因素引起的误差。随着科学技术的发展,高精度测量机器人的出现,使精密三角高程测量代替二等水准测量成为可能,其作为一种新的技术已广泛应用于高铁、桥梁等精密工程测量中,大大减轻了作业人员的劳动强度,提高了作业效率,特别在跨河水准测量方面优势明显。
2 基于测量机器人的精密三角高程方法
基于测量机器人的精密三角高程进行二等跨河水准测量方法是根据GB/T 12897—2006《国家一、二等水准测量规范》进行改进,规范中测距三角高程法的测距、测角分开进行,基于测量机器人的精密三角高程测量是采用测量机器人同时观测角度和距离,并用对中杆代替水准尺。通过改进观测程序,大大提高了观测效率,并且提升了测量精度和可靠性。该方法最大的优点是同时对向观测,无须量取仪器高和棱镜高。
该方法要求在跨河地段两岸选点组成大地四边形,如图1 所示:A、B、C、D4 个水准点作为跨河点。随着观测顺序不同4 点均作为仪器和对中杆架设点。其中,A与B、C与D之间距离基本相同,一般不超过20m[2]。
2.1 观测方程
一条跨河边的观测方法如图2 所示,图2 中B、D间的高差为:
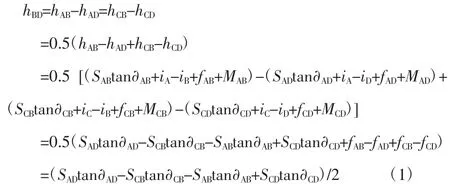

图1 选点示意图
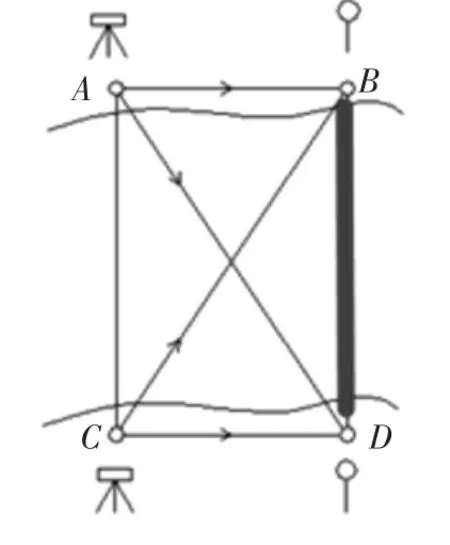
图2 观测示意图
式中,SAD、SAB、SCB、SCD分别为A、D,A、B,C、B,C、D间的水平距离;∂AD、∂AB、∂CB、∂CD为垂直角观测值;iA、iC和iD、iB分别是仪器高、棱镜高;MAB、MAD、MCB、MCD为垂线偏差改正值,在给高山地区垂线偏差的影响可以忽略。fAB、fAD、fCB、fCD为球气差改正值,fAB=KABS2AB/2R,fCD=KCDS2CD/2R,由于SAB、SCD距离约为10m,故fAB、fCD可忽略不计,fAD=KADS2AD/2R、fCB=KCBS2CB/2R;KAB、KCD、KAD、KCB为大气折光系数,R为地球半径;fAD-fCB=KADS2AD/2R-KCBS2CB/2R,由于同时对向观测,可认为KAD=KCB,fAD-fCB=KADS2AD/2R-KCBS2CB/2R=KAD/2R(S2AD-S2CB),由于、距离相差很小或相等,认为大气折光对高差不影响或影响很小。
式(1)即为基于测量机器人的精密三角高程进行跨河水准测量的高差计算公式,最大限度地消除了球气差,同时避免了量取仪器高和棱镜高人为引起的误差[3]。
2.2 观测程序
在跨河水准作业前测量出2 对中杆棱镜的高程不等差,在数据处理时予以改正。
一个跨河时段的观测程序如下:
1)首先观测A与B、C与D之间的高差,精确求出A与B、C与D之间的高差值;
2)在A、C点设站,在B、D点分别架设强制对中杆,精确对中精平B、D点中心位置,两个对中杆高度一致。同时观测本岸对中杆,而后同步观测对岸对中杆,可以计算出BD之间高差hBD值;
3)A点仪器不动,C点仪器和D点棱镜调换。两岸仪器同步观测对岸对中杆,而后同时观测本岸对中杆,可以计算出BC之间高差hCB值;
4)D点仪器不动,A点仪器和B棱镜调换,两岸仪器同步观测对岸对中杆,而后同时观测本岸对中杆,可以计算出AC之间高差hAC值;
5)B点仪器不动,D点仪器和C棱镜调换,两岸仪器同步观测对岸对中杆,而后同时观测本岸对中杆,可以计算出AD之间高差hAD值。至此完成一组观测,如需多组观测重复以上步骤。
2.3 限差
采用四边形法精密三角高程进行跨河水准测量时,测回间互差、各组垂直角观测限差、环线闭合差应满足下列要求:
1)各测回的互差dH限应不大于式(2)计算的值:

式中,M△为每千米水准测量的偶然中误差限差;N为双测回的测回数;S为跨河视线长度,km。
2)通过不同的观测顺序得到4 条跨河边的高差,将测量高差组成闭合环,求环闭合差,各环线的闭合差W应不大于式(3)的计算结果:

式中,MW为每千米水准测量全中误差限差;S为跨河水准线路长度,km。
抽取3 个独立环,列出条件方程进行条件平差计算[4,5],算出每条边的高差改正数,并评定精度,每千米高差中数中误差
3 工程应用
3.1 工程概述
在广州市轨道交通工程规划线路二等水准控制网扩测工程中,根据设计控制点分布及水准联测设计线路,需进行跨河水准测量的地点有4 处,跨河距离最窄处230m、跨河距离最宽处1330m,采用基于测量机器人的精密三角高程施测,显著降低了劳动强度,提高了工作效率,成果需符合二等水准要求。
3.2 项目实施
项目实施过程中投入Leica TM30 测量机器人2 台,强制对中杆2 个,高低棱镜2 个,对讲机2 台,多功能手持气象仪2 个。在跨河地段两岸选点组成大地四边形(见图1)按照上述方法、步骤作业。
3.3 成果分析
经计算,4 段跨河测量高差闭合差、高差中数中误差统计结果如表1 所示。
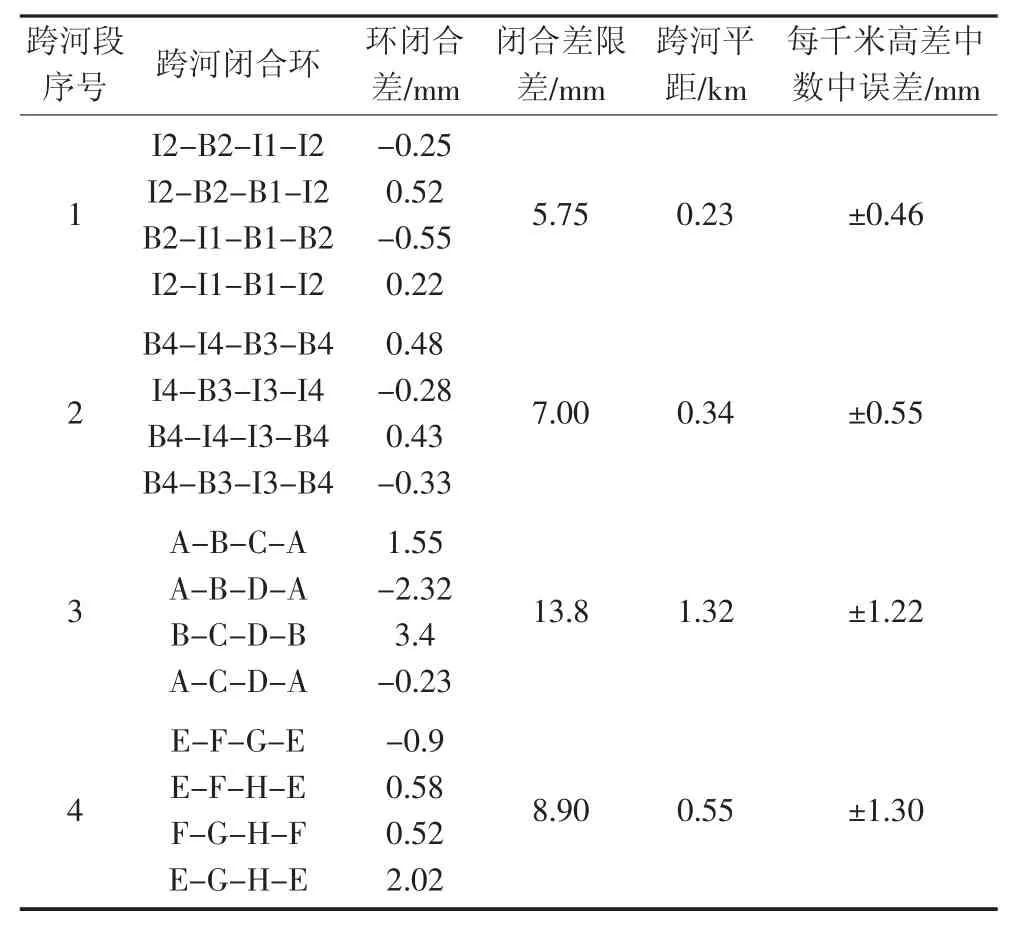
表1 闭合差和高差中数中误差统计表
通过计算分析,4 处跨河水准测量闭合环的闭合差、每千米高差中数中误差均满足国家二等水准限差要求[6]。
4 结语
本文对基于测量机器人的精密三角高程进行二等跨河水准测量方法进行了详细的论述,通过对观测程序改进,实现了同时对向观测,最大限度地消除了球气差的影响,无须量取仪器高和棱镜高,消除了人为干预引起的误差,显著提高了作业效率,降低了劳动强度。通过理论、精度分析和工程应用,验证了这一方法的可行性和高效性,优势明显。故在二等水准跨河测量中,建议采用文中提出的方法。
