基于自适应颜色和几何混合特征的点云配准方法
2019-12-02储小玉
储小玉
(安庆师范大学,安徽 安庆 246003)
一、引言
随着三维扫描技术的快速发展,物体表面形状的点云模型能够快速地被获取到,对于点云模型的研究也成为计算机视觉、计算机图形学等领域的热点,并在逆向工程、三维动画、文物数字化保护、医学图像处理等领域都有着十分重要的意义[1-2]。特征点是最基本的点云曲面几何形状的特征基元,对几何模型的外观及其准确表达具有重要作用。因此对特征点的提取是三维点云配准的关键步骤。
对于三维点云模型,特征点的提取方法很多,严剑峰[3]提出了一种利用点云所含的内在几何属性,提出了基于曲率序列的配准算法以及基于邻域点集各维“能量强度”的配准算法。Rusu等[4]提出的快速点特征直方图(FPFH),相比其他直方图特征,其描述性强、特征维度低、计算速度快,广泛应用于点云配准中。但对于稠密点云,计算每个点的特征会严重影响点云配准的整体效率,并且稠密点云中包含大量特征相近的点云数据,影响不同视角下的点云对应点匹配。Yang等[5]提出了一种局部特征值统计直方图,通过对局部形状几何图形的统计属性进行编码,结合法线之间的深度、点密度和角度三个低维度的描述符完成的,计算效率高,但描述符在模型数据的描述性不是很强。也有些学者将颜色数据作为有效的特征描述符,加入三维点云配准算法的研究中。Men等[6]在机器人上扫描获取室外场景数据进行RGBD数据配准,将采集的颜色数据转化为HSL模式,将色调H和深度数据结合为特征描述符完成点云配准。苏本跃等[7]在研究三维点云算法时,将Kinect设备采取颜色数据转化为灰度值,结合深度数据构造4D空间寻找对应点对,迭代配准。Kang等[8]提出了一种改进ICP迭代算法,结合颜色和几何信息的6DICP算法进行彩色点云配准,该算法将颜色和几何信息等量选取,并没有考虑到不同模型的颜色几何纹理分布大小不同。在本文,提出了一种自适应颜色和几何混合特征的点云配准方法,对颜色几何信息按自适应比例组合成混合特征进行点云配准。
二、特征点提取流程
本文颜色和几何特征点提取算法流程如图1所示,通过Kinect设备获取三维彩色物体的RGBD数据,对获取的点云数据去噪和删除重复存储点处理;搜索两片点云共有颜色的点数,进行颜色特征直方图和几何特征直方图统计,按照颜色几何特征自适应比例加权组合成混合特征,最后得到特征点的提取。
三、颜色数据筛选

图1 特征点提取流程图
众所周知,在图像中,颜色直方图遵循了图像之间的相似性原则。而Kinect设备采集的RGBD数据包含点云数据的颜色信息和三维坐标信息。本文首先统计出两片待配点云每种颜色的点数,滤掉少数较少的颜色,然后筛选出两片点云共有的颜色,用颜色直方图统计点数。如图2(a)是两片待配点云模型,统计出该两片点云共有的颜色类别达到2000多种颜色,如图2(b)所示两片点云颜色类别直方图统计,横轴是颜色类别,纵轴是颜色数量,可以看出颜色种类分布密集繁多,各点颜色数量少且分散,这会影响到后期通过特征点搜索对应点的用时增加,也会导致错误对应点匹配的几率增加,所以本文通过设定颜色容差筛选出两片点云共有的颜色点集。因为色调表示色彩信息,取色调值H设定颜色容差范围。如果点云的色调值在设定的颜色容差范围内,则把该点云归类于一种颜色类别。如图2(c)所示,统计出图2(a)模型共有颜色类别97种。相对图2(b)的数据集,减少了颜色类别,增加了颜色数量值。
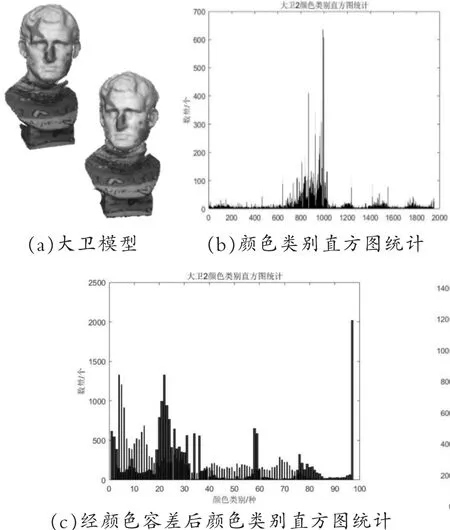
图2 大卫模型颜色类别直方图
四、混合特征直方图提取
经颜色筛选后的点云,本文将颜色和几何特征直方图统计的数据按自适应比例加权组合成混合特征,提取特征点进行三维点云配准。混合特征的权重大小α是根据不同点云模型颜色几何纹理不同选取。对于某模型通过设定颜色容差筛选出点云P,归一化该点云的颜色和几何数据后,计算该点云中的几何特征和颜色特征,统计出颜色和几何特征直方图分布,筛选出颜色和几何特征值频率大于均值的特征频率,占比于总特征值数量的比重作为权重大小。如图3(c)所示,为颜色几何混合特征直方图。
(一)颜色特征直方图提取
在三维模型的颜色几何纹理特征中,颜色特征是显著且稳定的视觉特征,是人识别物体的主要感知特征,对于几何特征而言,颜色具有相当强的鲁棒性,且在图像中,颜色直方图具有尺度不变性和旋转不变性,所以采用颜色直方图的方法来提取点云的颜色特征。本文中每一点的颜色特征值是通过获取8个最近邻点的颜色信息,采用拉普拉斯算子计算每个颜色通道上的颜色特征,再将各通道颜色特征进行范数运算得到该点的颜色特征值。最后对每一点进行颜色特征直方图统计。如图3(a)所示,为归一化的颜色特征直方图。横轴是颜色特征值0-1分布,纵坐标是颜色特征值出现的频率(即颜色特征的个数)。
(二)几何特征直方图提取
在三维点云配准中采用几何特征提取特征点的方法很多,曲率和法向量是获取三维局部形状特征的经典方法。本文中对于每一点的几何特征值是通过获取k最近邻点,计算该点与k最近邻点距离向量,法向量的长度可近似表达三维点云曲面点的凹凸性,再通过范数运算得到该点几何特征值。如图3(b)所示,为归一化的几何特征直方图。横轴是几何特征值0-1分布,纵坐标是几何特征值出现的频率(即几何特征的个数)。

图3 颜色、几何、混合特征直方图
五、配准迭代过程
在获取混合特征点后,通过K最近邻算法搜索混合特征点在目标点云中的最近点,采用归一化后的颜色和几何坐标构造6D距离度量标准,并计算点对间6D欧式距离的均值,剔除部分点对间距离过大的点对,选取小于该均值的点对。
本文配准算法步骤如下:
输入:混合特征点,目标点云。
输出:最优的旋转矩阵和平移向量。
步骤1:设置迭代次数N。
步骤 2:While i<N&emi>1*10^(-7)
步骤3:利用K最近邻算法搜索混合特征点在目标点云中的最近点,计算对应点对间6D欧式距离的均值,取小于该均值的点对。
步骤4:利用奇异值分解法求解旋转矩阵和平移向量,并计算点对的均方根误差RMSEi。
步骤 5:计算 emi=|RMSEi-RMSEi-1|i=2,…,N。
步骤6:将旋转矩阵和平移向量作用于特征点集,更新特征点集的位置。
步骤7:直到满足条件停止,否则继续迭代。
六、实验结果与分析
本文实验均在一台CPU为Intel Core i5-7500,主频3.41GHz,8GB内存,显卡为 AMD Radeon R740,操作系统Windows 10的PC机上进行,设备扫描为Windows Kinect 2.0,软件开发平台为Kinect for Windows SDK,算法使用MATLAB软件编程实现,点云可视化使用MeshLab软件展示。
本实验数据均由Kinect采集彩色模型获取,实验采集了颜色和几何不同分布的四种模型的数据进行实验,包括大卫1、大卫2、马头1、马头2。本文算法是基于自适应的颜色和几何数据加权组合成的混合特征,提取混合特征点进行点云配准验证实验。所以实验过程中,本文与没有考虑到颜色和几何数据权重影响的6DICP算法[8]作对比算法,验证了本文配准方法配准精度和效率。此外,本文给定不同的混合特征权重取值与本文自适应混合特征计算得到的权重作配准实验比较,验证了本文自适应混合特征权重为最优取值,在配准实验中缩短了点云配准时间。本文实验对配准变换后的源点云与目标点云置于在同一视角下的图像尺度不变特征变换 (Scale-invariant feature transform,SIFT)算法进行特征点匹配,计算图像对应匹配点对的平均距离作为模型配准误差度量的标准。
图4至图7分别是大卫1、大卫2、马头1、马头2模型采用两种点云配准算法配准的效果图展示,其中(a)表示不同视角下的两片点云模型;(b)、(c)分别表示两种配准方法。表1中给出本文算法和6D-ICP配准算法在各种模型实验下两片待配点云的点数,用“/”隔开。在配准前期,本文算法对几种模型经过筛选颜色点数,所以两片待配点云点数大量减少,经筛选颜色所用时间分别是 4.466,3、2.436,3、6.093,4、0.331,5(单位:秒)。本文算法中混合特征的权重取值在各实验效果图中已给出。表1中的配准时间为两片点云配准迭代时间,与6D-ICP配准算法相比,本文算法仅在配准时间上占有优势,若加上筛选颜色用时时间,本文方法略占优势,但在配准误差上本文算法配准精度更高一点。在配准前期经过筛选颜色点数,将点云大量筛减,虽然减少了点云模型数据信息,但并不影响算法的最终配准效果。从配准效果图上看,用椭圆有标注的图 4(b)、图 5(b)大卫鼻子有错位,图 6(b)马头的鼻子、图7(b)马身有轻微错位。

表1 各模型下,两种配准算法比较结果

图4 大卫1模型的两种算法配准效果图

图5 大卫2模型的两种算法配准效果图

图6 马头1模型的两种算法配准效果图
表2中在各实验模型下给出了本文混合特征统计权重大小以及三个选定值,进行配准实验比较。实验过程中,通过给定迭代误差,统计配准时间作为衡量权重为最优取值。从表2数据中看出,与给定的不同权重取值的配准结果相比,本文所采用的自适应混合特征权重取值方法缩短了配准时间,配准效果稳定。

表2 不同的模型下,各种权重取值作配准比较
七、结论
本文提出一种基于自适应颜色特征和几何混合特征的点云配准方法,首先通过统计点云数据的颜色值,滤掉少数点数的颜色。在一定颜色容差范围内筛选出两片点云共有颜色的点数,构建候选点集,然后统计颜色与几何特征直方图,按自适应比例组合成混合特征,继而提取特征点进行三维点云配准。在实验中,与基于颜色和几何数据的6DICP作对比,本文基于自适应颜色和几何混合特征配准算法缩短了配准时间,配准效果稳定。

图7 马头2模型的两算法配准效果图