基于降步长天牛须搜索算法的火电机组CCS特征轨迹设计
2019-11-29杨向东吕剑虹
柳 倩, 杨向东, 吕剑虹, 葛 浩
(1. 国家能源集团谏壁发电厂, 江苏镇江 212006; 2. 东南大学 能源与环境学院, 南京 210096)
协调控制系统(CCS)对于火电机组安全、经济运行十分重要。目前,出于消纳清洁能源及缓解电网负荷年峰谷差、昼夜峰谷差问题的目的,须要挖掘不同容量火电机组深度调峰的潜力,以提高火电机组运行灵活性,这对亚临界火电机组CCS提出了更高的要求。
深度调峰运行方式要求亚临界机组运行在深度低负荷工况下,此时机组协调被控对象动态特性发生明显变化,原控制器参数不再适配,导致CCS性能退化,严重影响了机组的调峰能力。亚临界火电机组CCS是典型的多变量系统,目前有很多诸如预测控制算法[1]、神经网络控制算法[2]、智能控制算法[3]等先进控制算法被提出,相关研究得出其仿真效果较好,但是难以通过工程实现。在目前热工过程应用中,基于PID的控制方法仍占据主导地位。
用多变量频域法设计深度调峰运行方式下的亚临界火电机组CCS,是一种有效且易于工程实施的方法。目前,逆奈奎斯特法、顺序设计法等多变量频域法被用于设计火电机组CCS中,但仍存在较多问题。对于以逆奈奎斯特法为代表的等对角元优势法,对系统描述较粗略,导致设计结果不佳;而当对象传递函数模型近似或接近奇异矩阵时,设计结果会不可靠。故须要采用特征轨迹(CL)法对深度调峰运行方式下对象的动态特性进行分析。然而在采用CL法设计CCS时,部分关键参数不可避免地须要通过试探法求取,无法保证达到最佳控制效果。
笔者针对深度调峰下火电机组CCS,首先通过CL法确定控制器及部分必要参数,同时结合逐步降步长的天牛须搜索(SDBAS)算法寻优得到最佳控制器参数,并通过仿真结果及应用效果分析该方法的工程应用前景。
1 CCS概况
1.1 CCS的任务
将研究的亚临界火电机组CCS通过将汽轮机和锅炉作为整体进行控制,以完成如下任务:(1)负荷指令不变时,能够消除扰动引起的主蒸汽压力波动及负荷偏差;(2)负荷指令改变时,对外能够保证功率响应及时,对内能够控制主蒸汽压力偏差在允许范围内,维持机组安全稳定运行。
1.2 被控对象模型
简化后的亚临界火电机组CCS控制结构示意图见图1,uB、uT分别为锅炉燃烧率指令、汽轮机调节阀指令,pT、NE分别为主蒸汽压力(机侧压力)、实发功率。

图1 CCS控制结构示意图
该亚临界单元机组CCS被控对象可被视为2×2多变量对象,其输入输出关系为:
(1)
式中:GPB(s)、GNB(s)分别为以uB为输入,pT、NE为输出的传递函数(uT保持不变);GPT(s)、GNT(s)分别为以uT为输入,pT、NE为输出的传递函数(uB保持不变);G(s)为被控对象的传递函数矩阵。
主蒸汽压力调节回路和功率调节回路之间具有较强的耦合关系。
2 基于SDBAS-CL法的CCS设计
2.1 控制器结构设计
CL法的基本思想是首先设计高频控制器以实现高频下的对角优势,减少高频干扰;然后在中频及低频处设计补偿控制器以补偿特征轨迹,并最终实现良好的瞬时及稳态特性[4]。具体设计步骤如下:
(1) 被控对象传递函数矩阵为G(s),在高频ωh处计算实阵Kh≈G-1(jωh),以补偿特征轨迹及失配角,降低高频关联。
(2) 判断高频补偿后系统稳定性。若不稳定或稳定裕量不足,在中频ωm≤ωh处设计控制器Km(s)补偿系统中频特征轨迹。经过高频补偿后系统矩阵为G(s)Kh,计算其中频ωm对偶特征值矩阵和特征向量矩阵,通过方向排列法[5]近似得到对偶特征向量矩阵的近似实标架Am和Bm,则Km(s)计算公式为:
Km(s)=Amdiag{km1(s),km2(s)}Bm
(2)
式中:km1(s)、km2(s)为标量传递函数。
若系统稳定性、关联程度不符合要求,则须要重新设计。
(3) 判断中频补偿后系统低频关联及稳态精度。若不满足,在低频ω1≤ωm处设计控制器K1(s)补偿系统低频特征轨迹。经过高、中频补偿后系统矩阵为G(s)KhKm(s),计算其对偶特征值矩阵,并求得近似实标架A1和B1,则
K1=A1diag{kl1,kl2}B1
(3)
式中:kl1、kl2是满足增益平衡要求的实数。
则K1的(s)计算公式为:
(4)
(4) 合并各高、中、低频补偿控制器,有总的控制器K(s)为:
K(s)=KhKm(s)K1(s)
(5)
最终得到控制器传递函数示意图见图2。

图2 控制器传递函数示意图
2.2 控制器参数优化
自然界中,长角天牛根据接收到的食物气味分子来确认食物所处位置。长角天牛在头部两侧长有触角,其飞行方向是由触角接收到的食物气味强弱决定的。左侧触角接收到更强的气味信号,天牛飞向左侧;反之,天牛飞向右侧。受此启发,JIANG X Y等[6]于2017年提出天牛须搜索(BAS)算法。BAS算法是一种生物启发的寻优算法,该算法不需要梯度信息且不要求函数的具体形式,具有求解速度快、精度高等特点[7]。
2.2.1 SDBAS算法模型

对于待寻优的目标函数f(x)(气味强弱信号),两侧触角接收到的值fleft、fright分别为:
fleft=f(Xleft)
(6)
fright=f(Xright)
(7)
比较两者大小,确定天牛下一步要走的位置Xcenter,next:
(8)
式中:sign为符号函数;dstep为步长。
最终确定目标函数最大值(气味信号最强)的位置。
在仿真中发现,BAS算法求解精度对步长变化较为敏感,固定步长的BAS算法寻优结果精度不高,可能落在鞍点上,甚至出现寻优结果不收敛。故采用SDBAS算法,其基本思想是初始时刻天牛的飞行距离(步长)较大, 较快地飞向目标点,加快收敛速度,此后逐渐减小步长,在接近目标时不至于错过最值点,保证寻优精度。实现方法是引入小于1的步长系数σ,下一次迭代时的步长dstep,next则为:
dstep, next=dstepσ
(9)
由式(9)可知天牛飞行步长以一定比例不断减小。
2.2.2 参数优化流程
基于CL法设计原理,最终可以得到如下式的系统控制器
(10)

误差积分准则被广泛应用在各类最优控制器的设计过程中。常用的误差性能指标有时间乘平方误差积分(ITSE)和时间乘绝对误差积分(ITAE)等[8]。其中按ITAE准则设计的控制系统,瞬态响应的振荡性小,因此具有较好的选择性与实用性[9]。ITAE准则的计算所得积分J为:

(11)
式中:t为时间;e(t)为偏差。
(12)

图3为基于SDBAS-CL法优化控制器参数流程图。
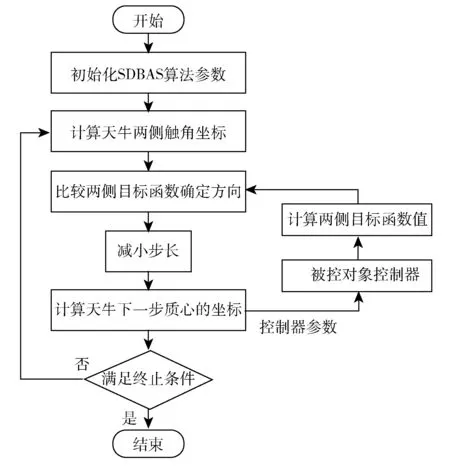
图3 基于SDBAS-CL法优化控制器参数流程图
3 仿真实例
3.1 控制器求解
多数机组CCS模型研究机组负荷在50%Pe(Pe为额定负荷)至100%Pe,同时存在建模误差较大、模型结构复杂等问题,而系统辨识建模的结果较为简单,也更能反映机组的真实动态特性。因此,笔者直接采用某电厂现场的阶跃响应试验数据来建立机组CCS的传递函数模型,其中CCS被控对象在40%Pe工况下低阶近似传递函数为:
G(s)=
图4为被控对象CL和失配角曲线(-50 rad/s≤ω≤50 rad/s,ω为系统频率),λi(s)(i=1,2)为特征根,Reλi(s)、Imλi(s)分别为λi(s)的实部和虚部。两条轨迹都不包围临界点(-1,j0),且G(s)没有位于右半平面上的极点,故闭环系统稳定,并可观察出系统存在很强的耦合,须要在高频处进行补偿。

图4 G(s)的CL及失配角曲线
图5为G(s)Kh的CL和失配角曲线,可观察出系统在高频处的耦合程度降低,且闭环系统稳定。
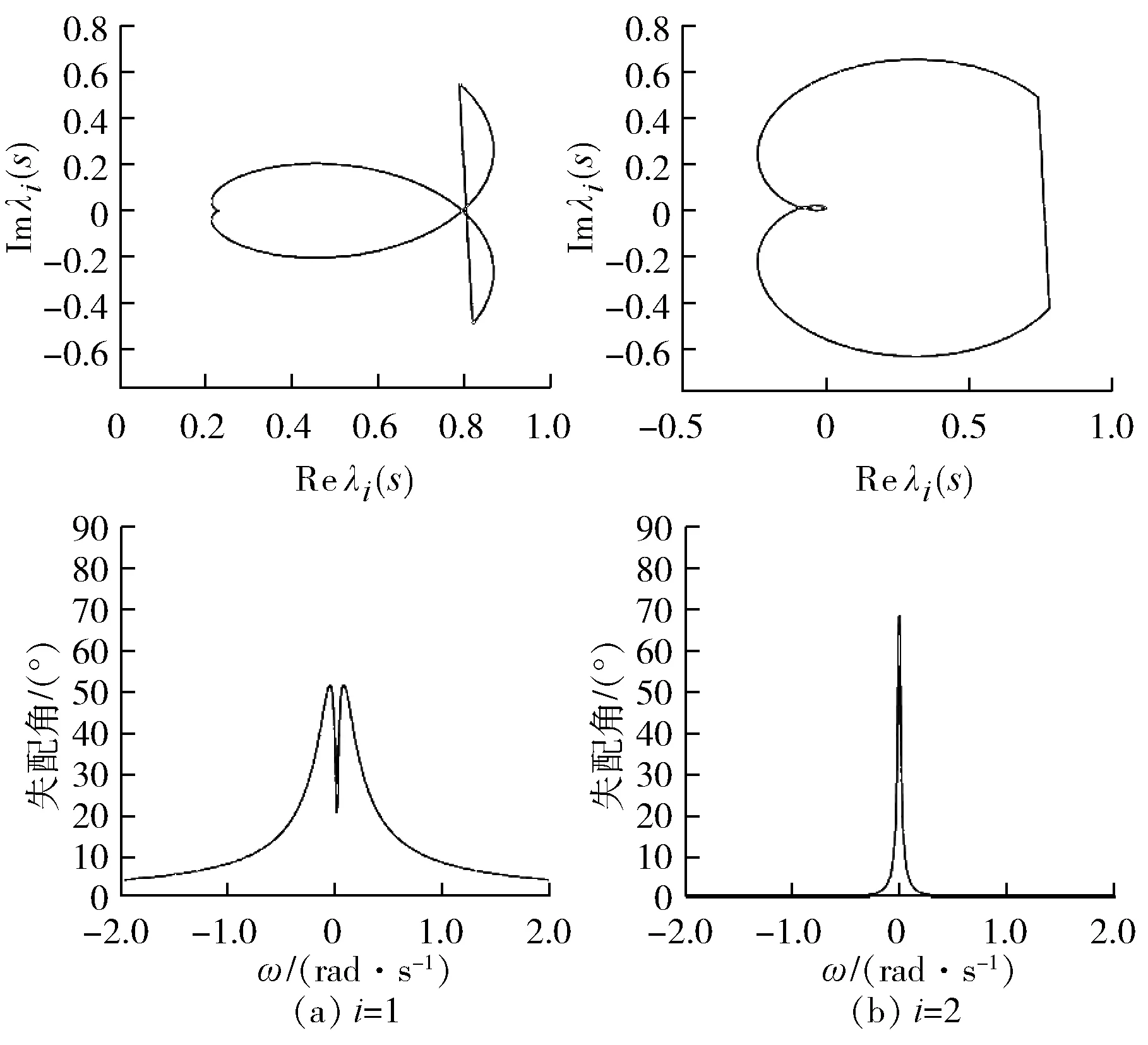
图5 G(s)Kh的CL及失配角曲线
该例中,中频段的特性较好,无须补偿。经过高频补偿后系统矩阵为G(s)Kh,在低频时取ω1=0.01 rad/s,同时考虑增益平衡的要求,取kl1=0.1,kl2=0.2。
设置SDBAS算法的初始化参数:迭代次数为200,空间维度为4,初始步长为1,步长系数为0.94,dlength为0.015,Xcenter空间坐标随机给定。同时设定γ1=0.6、γ2=0.4,n=0.7,利用SDBAS算法寻优得到

图6为G(s)K(s)的CL和失配角曲线,可观察出系统中、高频时失配角足够小,耦合程度低,同时闭环系统稳定。
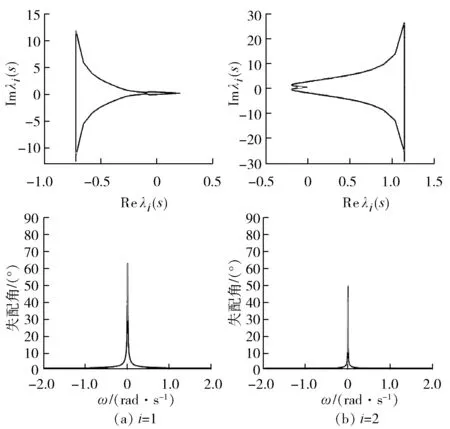
图6 G(s)K(s)的CL及失配角曲线
3.2 性能试验
为进行对比,采用文献[10]提出的并矢展开(DE)法设计CCS控制器,SDBAS-CL法及DE法设计出的控制器分别为SDBAS-CL控制器及DE控制器。选取ω=0.008 rad/s,并以6 MW/min(机组Pe为300 MW)速率进行变负荷试验,变动范围为±10%Pe。在深度调峰工况下,机组一般定压运行,故试验时保持压力设定值不变。
SDBAS-CL控制器及DE控制器的被控量及控制量的响应曲线见图7、图8。
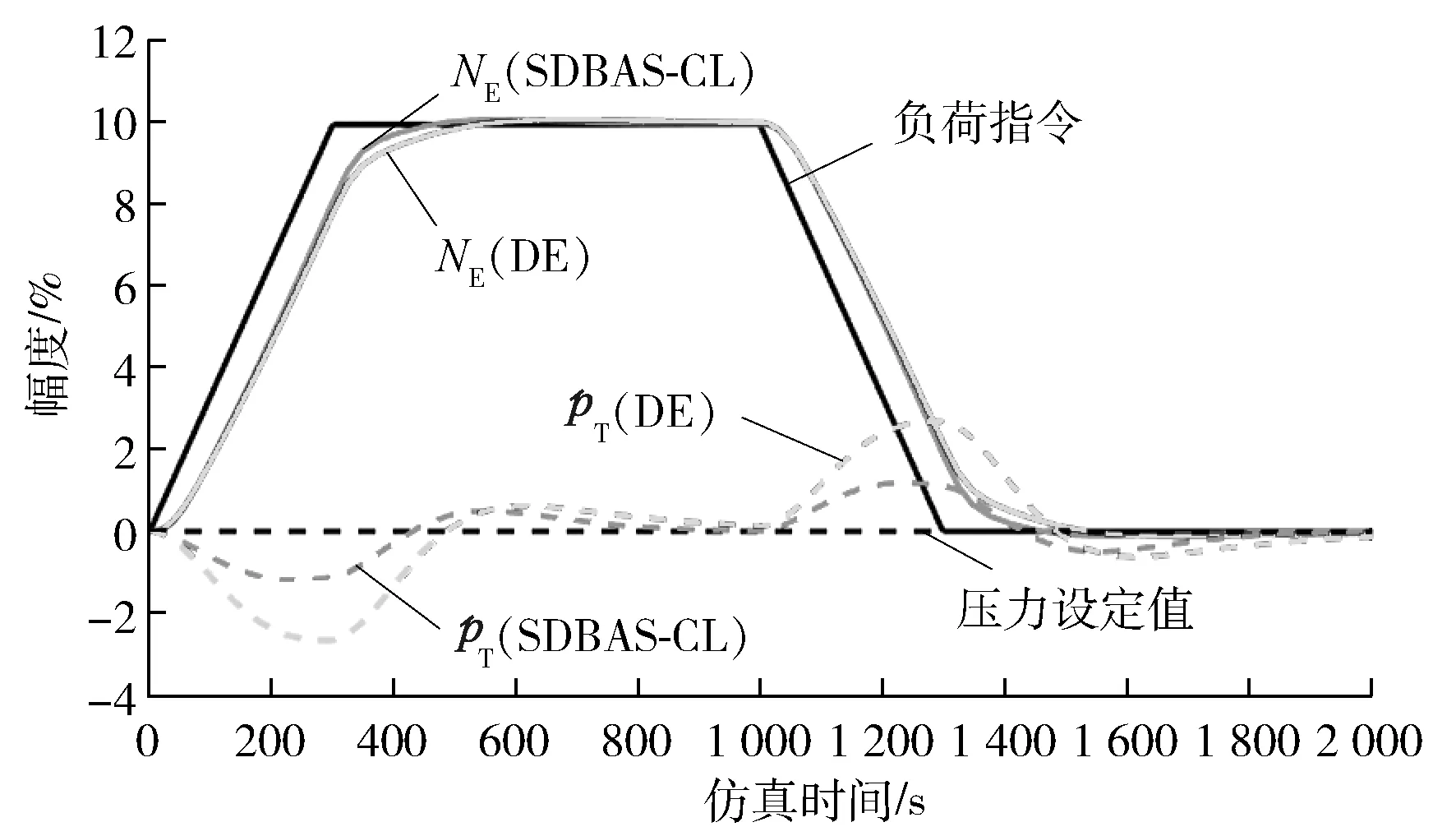
图7 6 MW/min速率下被控量的响应曲线
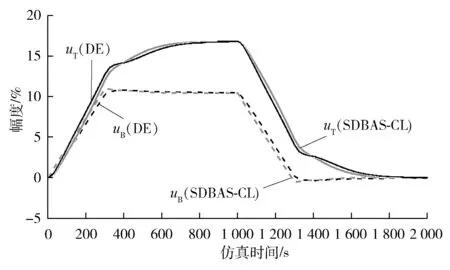
图8 6 MW/min速率下控制量的响应曲线
SDBAS-CL控制器的负荷响应曲线不仅快于DE控制器,且前者的压力波动明显远小于后者,即在相同的压力波动限制范围内,SDBAS-CL控制器下的机组能以更大的速率变负荷运行。
4 工程应用
4.1 协调控制策略
基于SDBAS-CL法的机组CCS结构图见图9。新的控制策略保留原机组协调系统“前馈+反馈”的控制结构,仅在反馈回路中用基于SDBAS-CL法设计的锅炉汽轮机主控制器,替代原机组协调系统中主蒸汽压力和机组负荷闭环控制回路中的PID控制器,既通过前馈保证了锅炉侧响应速度,又通过反馈兼顾被控量的稳定性,从而保证了深度调峰运行方式下CCS的控制性能。
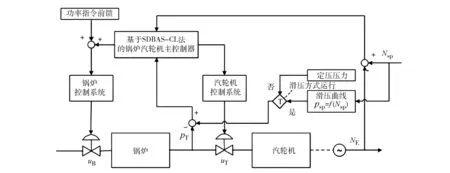
Nsp—限速后功率;psp—压力设定值
图9 基于SDBAS-CL法的CCS结构图
在深度调峰方式下,机组一般定压运行。压力及负荷偏差信号产生后送至锅炉汽轮机主控制器计算,控制器输出锅炉燃烧率指令、汽轮机调节阀指令及作用于CCS的被控对象。
4.2 应用效果
试验过程中主要参数变化见表1。
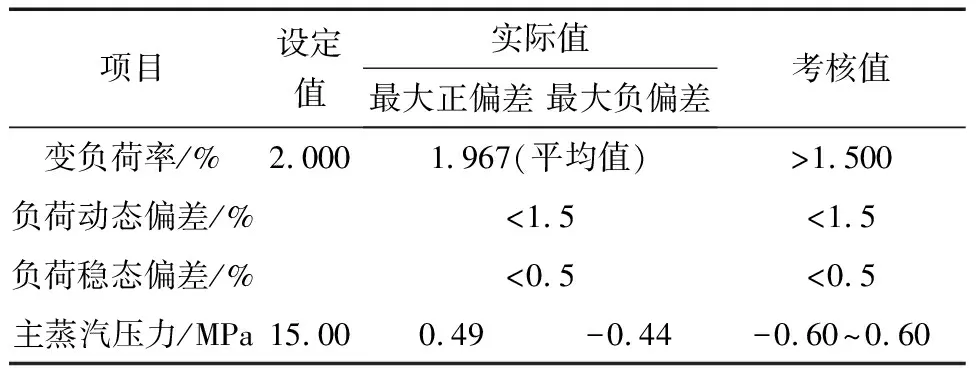
表1 6 MW/min速率升、降负荷试验数据
对采用基于SDBAS-CL法的CCS机组进行深度调峰方式下的变负荷试验。工程应用的机组Pe同样为300 MW,以6 MW/min的速率从165.12 MW下降至130.14 MW,稳定后上升到165.89 MW,后又下降至130.01 MW。
由表1分析可得名义6 MW/min速率下深度调峰机组协调系统整体性能评价:
(1) 负荷控制。实际的平均变负荷速率达到5.9 MW/min,满足变负荷速率的要求。动态过程平稳,无振荡,过调量很小,响应延迟时间、动态控制偏差、稳态控制精度均满足要求。
(2) 主蒸汽压力控制。在机组大幅快速变负荷时,主蒸汽压力与设定值的最大动态偏差<0.5 MPa,且能较快地回调稳定;在机组负荷稳定在130 MW过程中,主蒸汽压力最大偏差<0.3 MPa。
5 结语
在采用传统CL法设计控制系统的过程中,部分关键参数通过试探法求取,无法保证控制系统性能。笔者将CL法和SDBAS算法相结合,充分利用两者的优点,通过频域法保证控制系统的稳定性,通过寻优算法优化控制器参数、提升控制性能。仿真结果表明笔者提出的控制器模型具有良好的负荷跟踪、抗干扰性能,且鲁棒性较好,能较好地满足工程需要。该方法设计的控制器本质上是PI控制器,易于在组态中实现,而不须要对分布式控制系统组态模块进行二次开发,也不须要增设第三方外挂设备实现先进功能。
