激光雷达中扫描振镜控制研究
2019-11-25任福汉余红英
任福汉,余红英,刘 琛
(1.中北大学,太原 030051; 2.中国电子信息产业集团第六研究所,北京 100083)
0 引 言
激光雷达是探测目标、远程测距、面阵成像常用系统之一,在军事、航天、民用等多领域发挥着巨大作用。在激光雷达系统中,扫描振镜至关重要[1]。扫描振镜(GS),也称电流计扫描仪,是一种性能优良的矢量扫描器件,是高频驱动下的一种特殊的摆动伺服电机。扫描振镜将激光雷达发射的激光源,通过电机上两个反射镜的摆动,形成激光面阵,达到激光扫描成像效果[2]。
对于扫描振镜的周期性运动控制,传统PID参数整定更多依靠经验,抗干扰能力不足,控制性能无法满足扫描振镜需求。模糊控制是先进控制理论之一,在非线性和时变系统中有较好控制性能,但是模糊控制缺少积分环节,无法消除稳态误差[3]。模糊控制更多是与其他先进控制理论结合,提高控制性能。滑模变结构控制有良好的抗干扰能力、动静态特性,但是存在抖振现象,限制了滑模变结构控制在实际中的应用[4]。基于此,本文提出模糊滑模变结构控制,利用模糊算法抑制滑模变结构控制的抖振现象,提高扫描振镜抗干扰能力。
1 振镜数学模型
扫描振镜在相对较大的角度范围内具有高线性、低惯性的特点,这使得它们可以在高达几千赫兹的扫描频率下使用。为了通过帧扫描获得均匀的光场,帧扫描的频率应该是几十赫兹。激光雷达扫描振镜系统框图如图1所示。
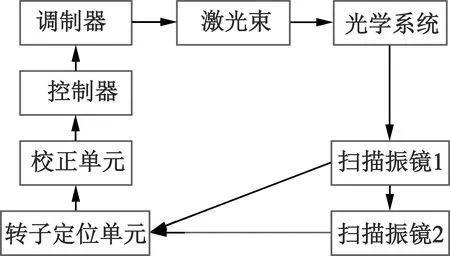
图1 激光雷达扫描振镜系统框图
扫描振镜由电气系统和机械系统组成,扫描振镜电气机械系统组合如图2所示[5]。
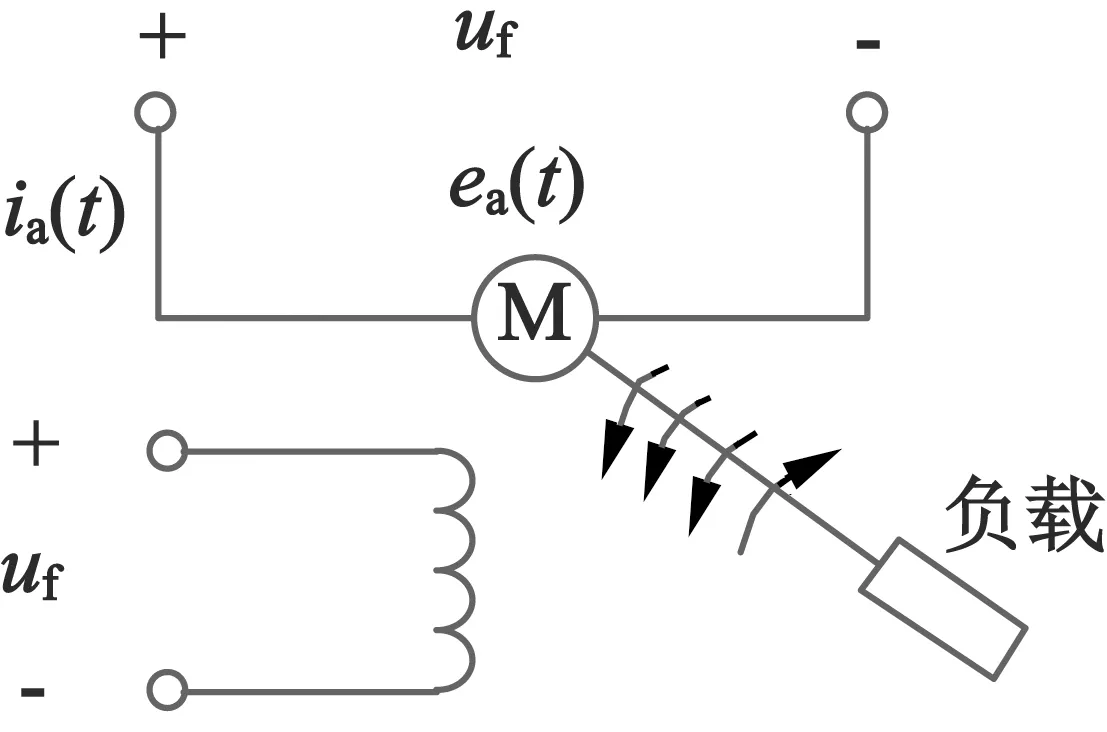
图2 扫描振镜电气机械系统组合
电枢回路微分方程如下:
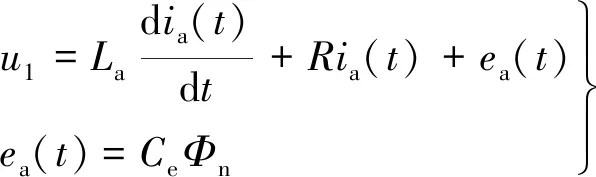
(1)
扫描振镜动力学方程如下:
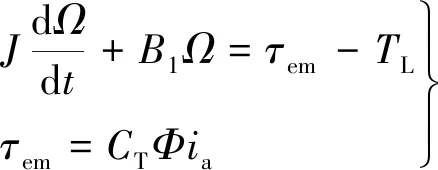
(2)
式中:Ω为机械角速度,Ω=2πn/60。
设系统初始状态为零,对式(1)、式(2)进行拉普拉斯变换,结果如下:
(3)
(4)


(5)

(6)
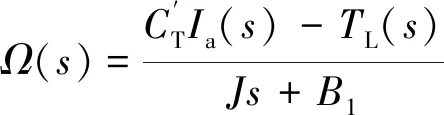
由式(5)、式(6)扫描振镜传递函数框图如图3所示。
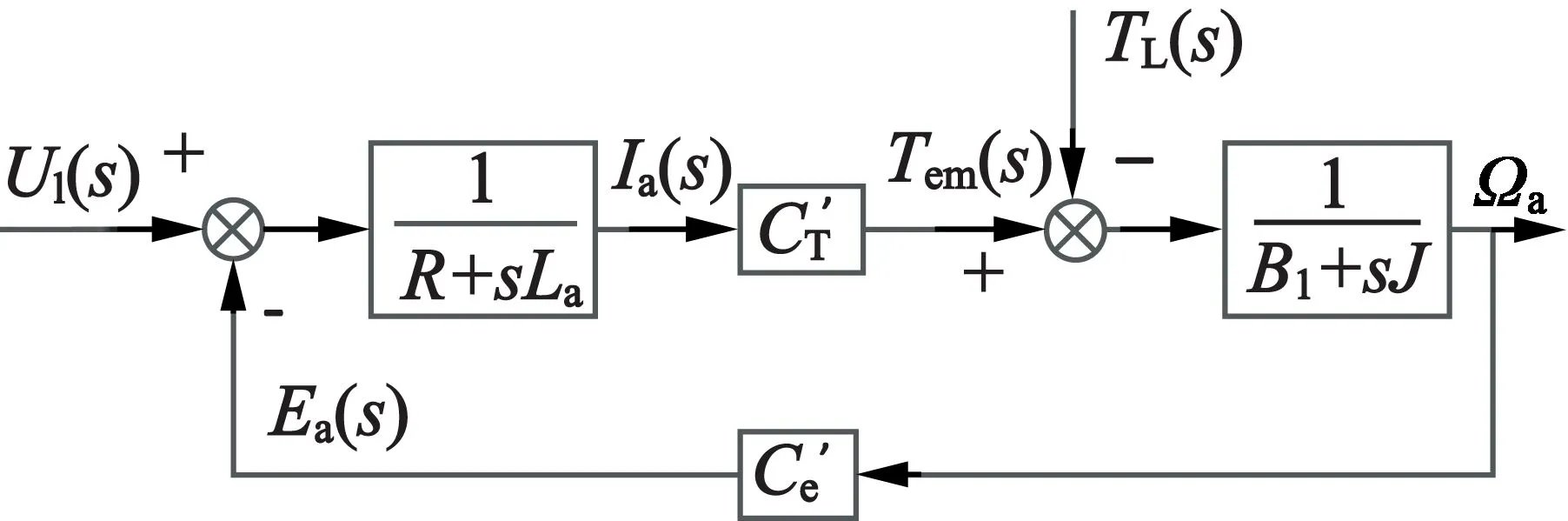
图3 扫描振镜传递函数框图
2 扫描振镜控制算法
2.1 模糊PID控制
完整的模糊控制器包括模糊化接口、推理机(包括数据库和规则库)以及解模糊接口[6]。模糊化接口负责将输入参数模糊化处理,并移交推理机进行规则运算,推理机输出参数通过解模糊接口,计算出系统整定所需参数。
模糊PID控制原理图如图4所示。模糊PID与传统PID相比,在动态响应、静态响应以及鲁棒性方面都有一定的提高[7],是现代先进控制理论使用较为广泛的控制算法之一。在本文中,模糊PID通过对扫描振镜位置反馈误差e以及误差变化率ec进行模糊化,根据模糊规则实时整定系统控制所需参数KP,KI,KD,以达到期望的控制性能。
图4 模糊PID控制原理图
输入参数e,ec和输出参数ΔKP,ΔKI,ΔKD模糊子集{NB,NM,NS,NZ,Z,PS,PM,PB}。
设定e,ec是高斯型隶属函数,ΔKP,ΔKI,ΔKD的隶属函数为三角,论域为[-3,3],得到如表1、表2、表3中对应的ΔKP,ΔKI,ΔKD模糊控制规则表。
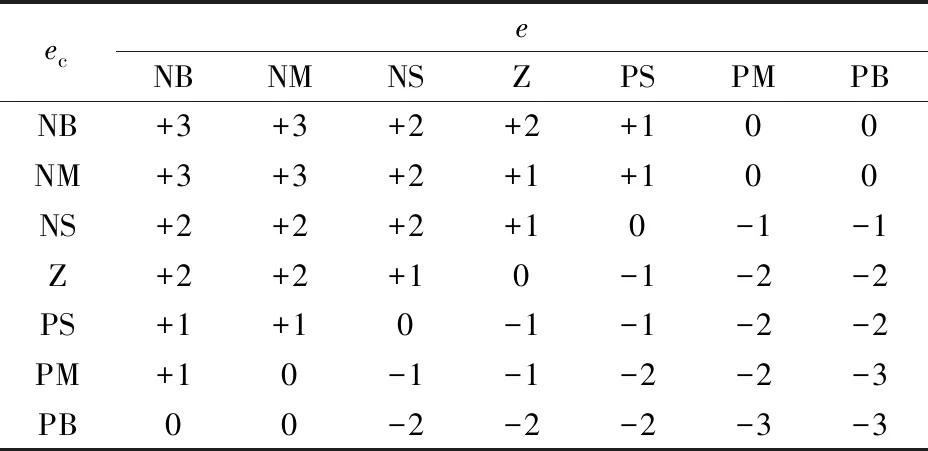
表1 ΔKP模糊规则表
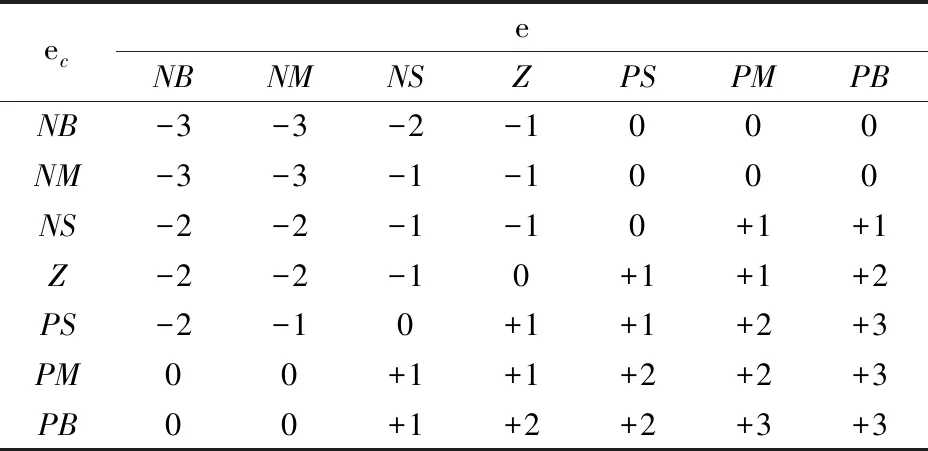
表2 ΔKI模糊规则表
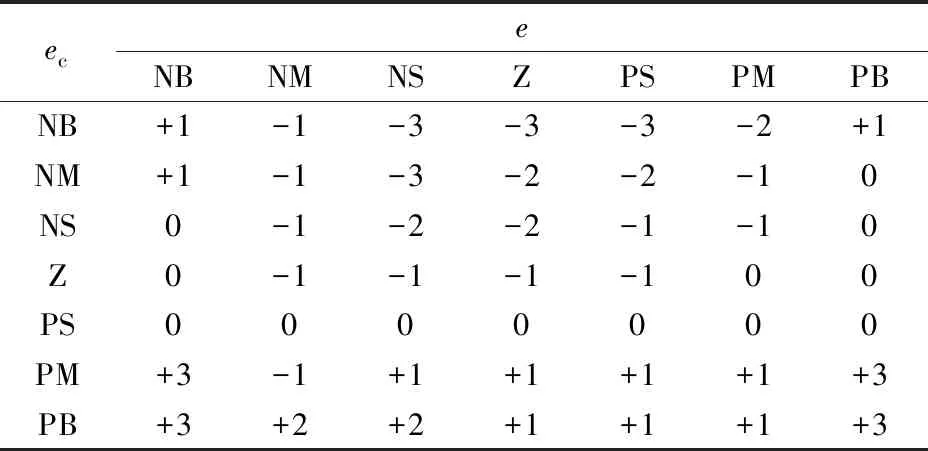
表3 ΔKD模糊规则表
2.2 滑模变结构控制
滑模变结构控制也是先进控制技术之一,是一种变结构控制策略。滑模变结构控制与其他先进控制技术的本质区别在于其非连续控制。滑模变结构控制具有优良的抗干扰能力,但由于存在抖振现象,滑模变结构控制并不能单独应用于实际工程[8]。现对滑模变结构控制进行简要说明。
在欠驱动的滑模变控制系统中,状态表达式:

(7)
存在翻转方程s(x)=s(x1,x2,…,xn)=0,状态空间被s(x)划分为s>0及s<0两部分。图5为系统状态空间示意图,图中点A,B,C为状态空间中三种类型,即:通常点A、起始点B以及结束点C。
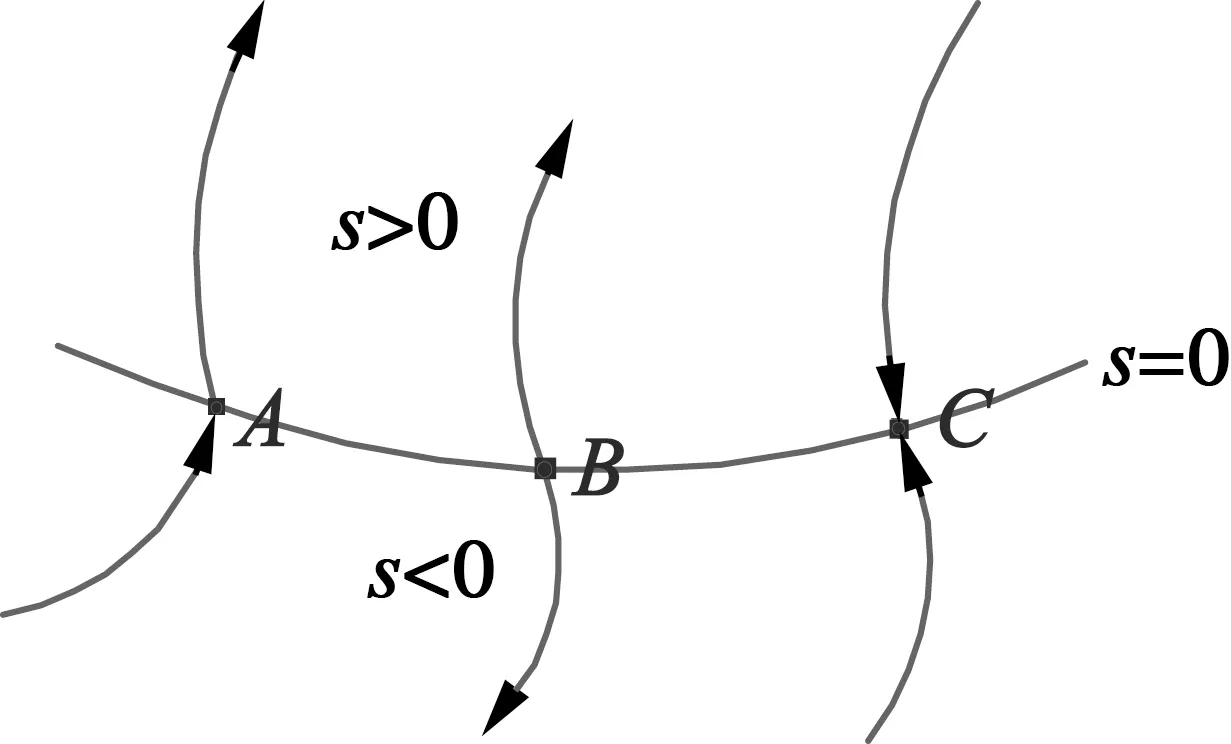
图5 系统状态空间示意图
状态空间中运动点在s(x)=0处是结束点条件:
(8)
式(8)也可以表示:
(9)
式(9)对系统提出了一个形如:
v(x1,x2,…,xn)=[s(x1,x2,…,xn)]2
(10)
的Lyapunov约束函数的条件方程。由于在翻转面数值域内,式(10)是正定的,并根据式(9),s2导数为半负定,在s=0附近v是一个非增函数。所以在式(9)成立的基础上,式(10)为系统条件Lyapunov函数,即系统稳定于s=0。
设控制系统:

(11)
需要确定其切换函数s(x),且s∈R″。
求解控制函数:
(12)
在本文中,设激光雷达扫描振镜PSD(光位置传感器)位置状态方程:

(13)

(14)
则切换函数:

(15)
所以,控制律:
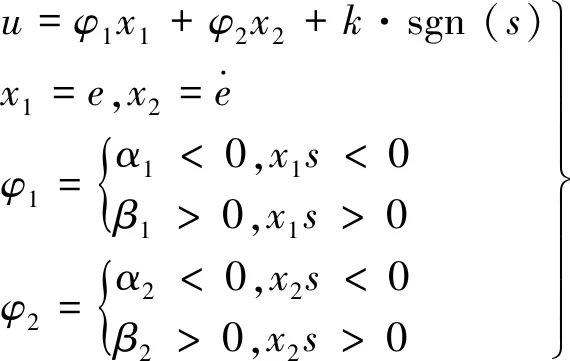
(16)
2.3 模糊滑模变结构控制
建立扫描振镜数学模型时,实际应用环境中诸多影响因素是不可估计的,在应用中会受到较大干扰,但滑模变结构控制需要较大的切换增益,不可避免地产生抖振现象,限制了其在扫描振镜中的应用。根据常规趋近律调节系统参数的方法,能够抑制抖振现象。被调参数需要根据系统条件而定,常规调节方法将被调参数设为恒定值,导致其不能在线调整。为了改进此缺点,更好抑制抖振现象,本文将模糊控制与滑模变结构控制相结合,在滑模变结构控制基础上,引入对切换函数幅值的模糊控制。在模糊控制中,输入为切换函数目前幅值,并根据切换函数幅值计算出模糊控制器输出量,保证系统良好的鲁棒性、抗干扰性,并且最大限度抑制抖振现象。模糊滑模变结构控制原理图如图6所示[9]。
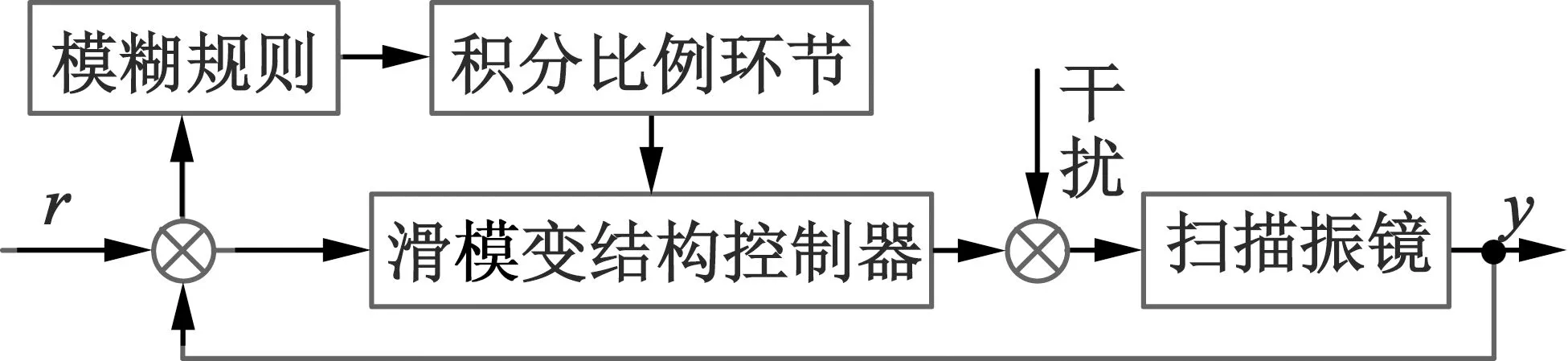
图6 滑模变结构控制原理图
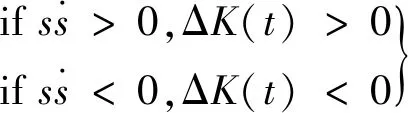
(17)


表与ΔK(t)之间模糊规则表
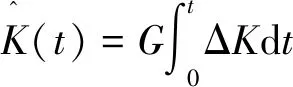
(18)
式中:G是由经验确定的比例系数。则控制率:

(19)
3 扫描振镜仿真
3.1 模糊PID仿真
在MATLAB中运行Fuzzy Logic Designer,将表1、表2、表3模糊控制规则输入到Ruler Editor,得到ΔKP,ΔKI,ΔKD模糊规则曲面图,如图7所示。
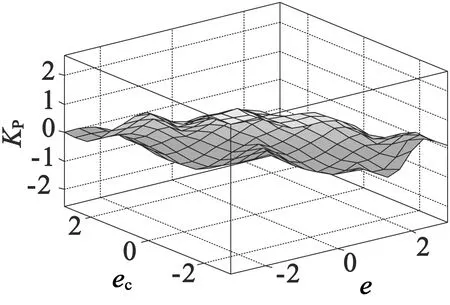
(a) ΔKP
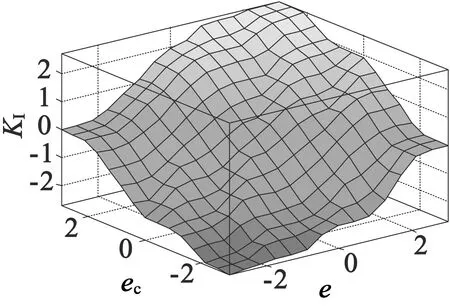
(b) ΔKI
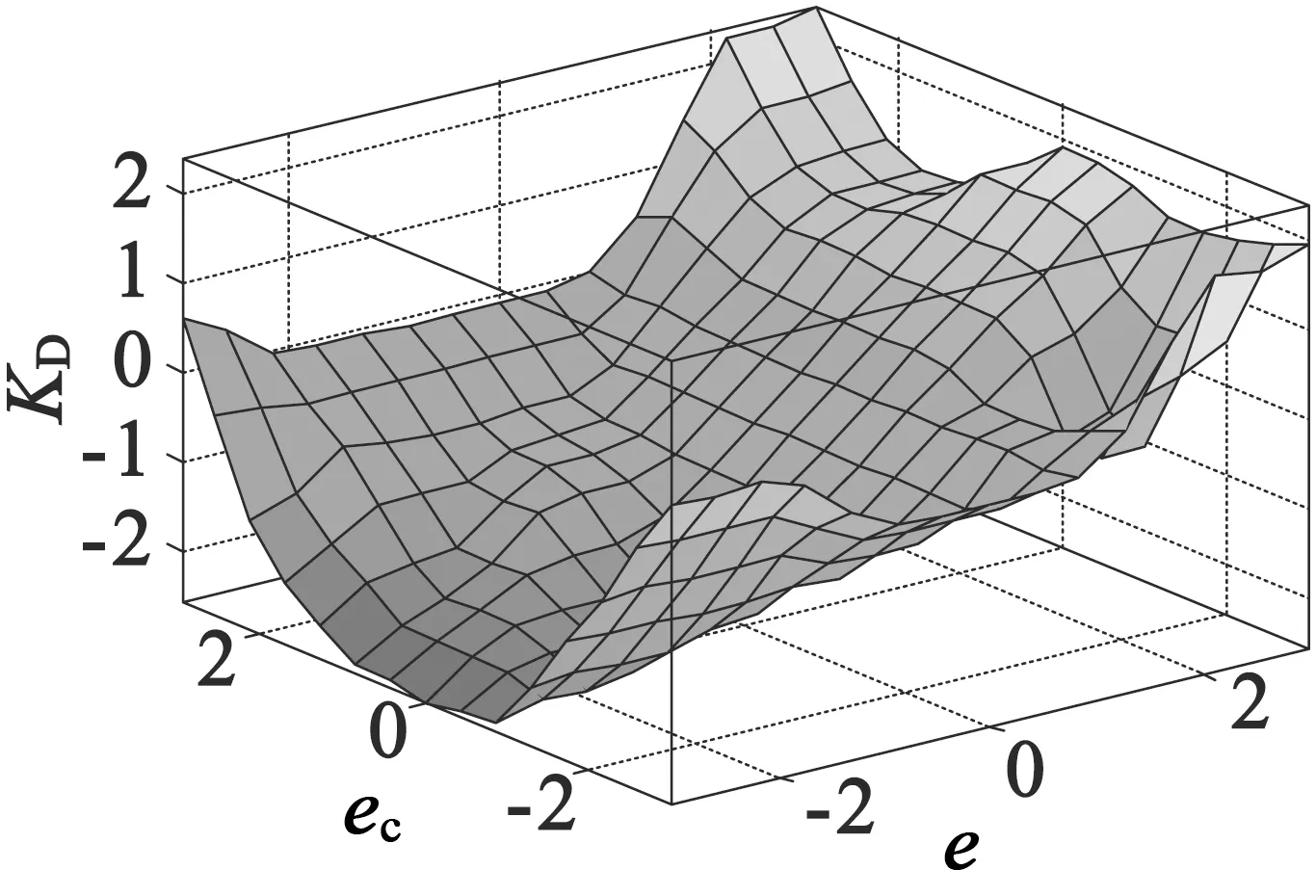
(c) ΔKD图7 ΔKP,ΔKI,ΔKD模糊规则曲面
在Simulink中对PSD数据进行模糊PID控制仿真,其单位阶跃响应曲线、位置误差e、速度ec曲线如图8所示,系统调节时间为3 s,超调量为1%。
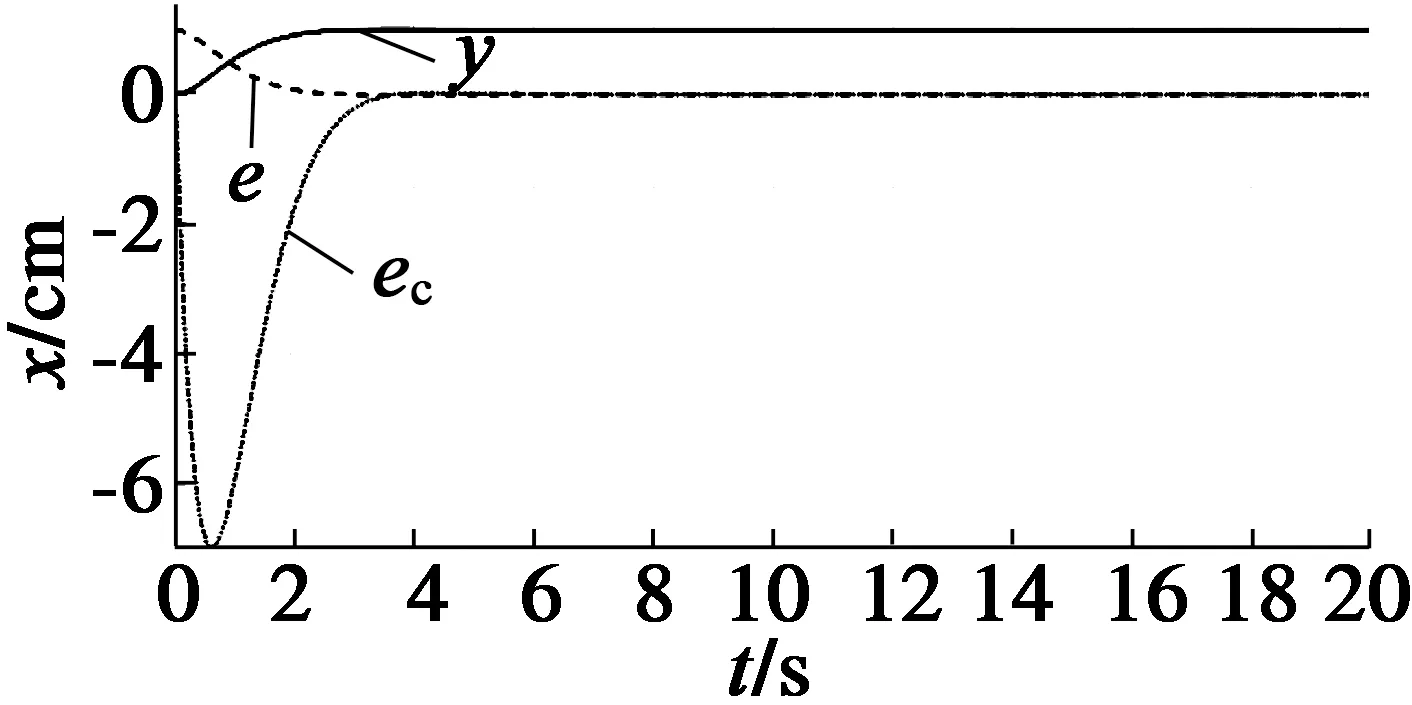
图8 模糊PID仿真曲线
图9是传统PID控制与模糊PID控制脉冲扰动响应曲线。相同情况下加入扰动,模糊PID扰动超调量为18%,传统PID为21%。
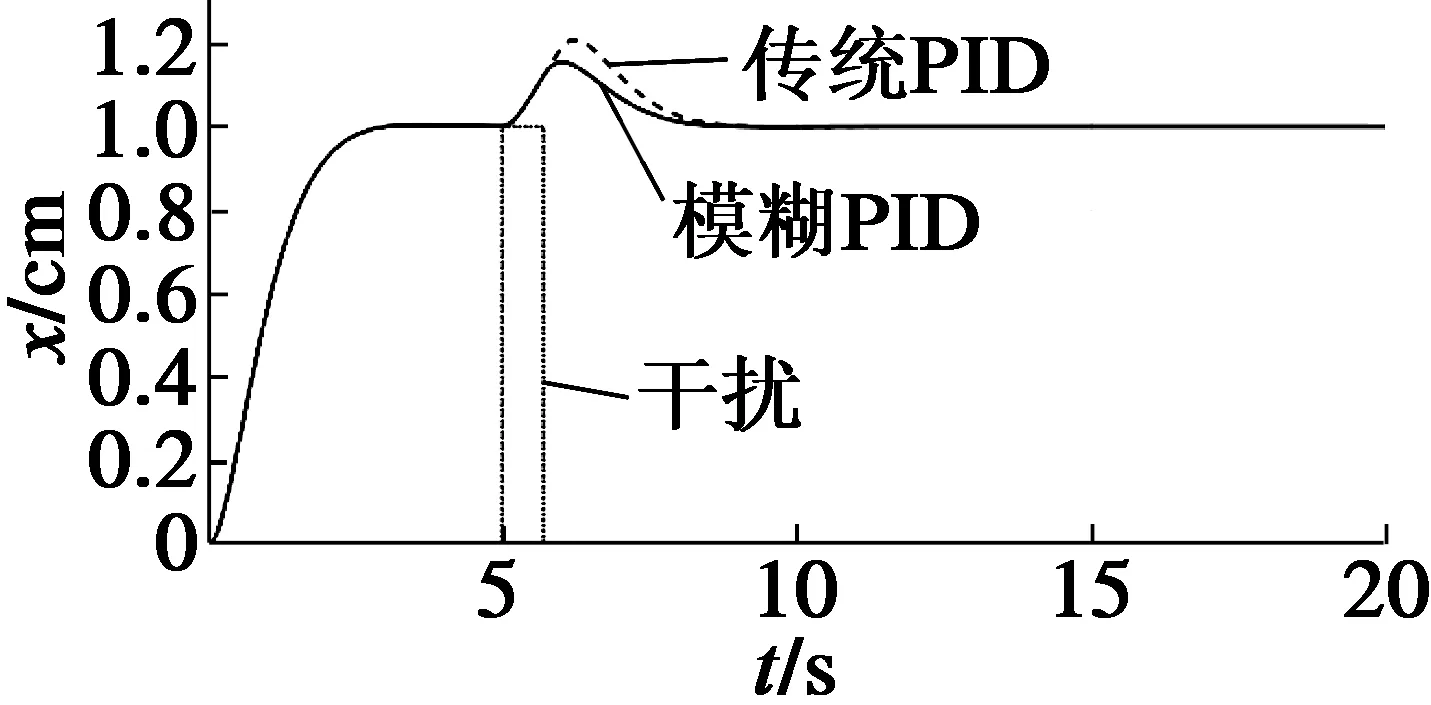
图9 脉冲扰动响应曲线
3.2 滑模变结构仿真
在Simulink中对采用滑模变结构控制的扫描振镜PSD位置环进行仿真,得到PSD数据阶跃响应y、位置误差e、速度误差ec曲线,如图10所示。系统调节时间为3 s,超调量为0.06%。但在y平稳后,存在抖振现象,位置误差e、速度误差ec有明显波动。
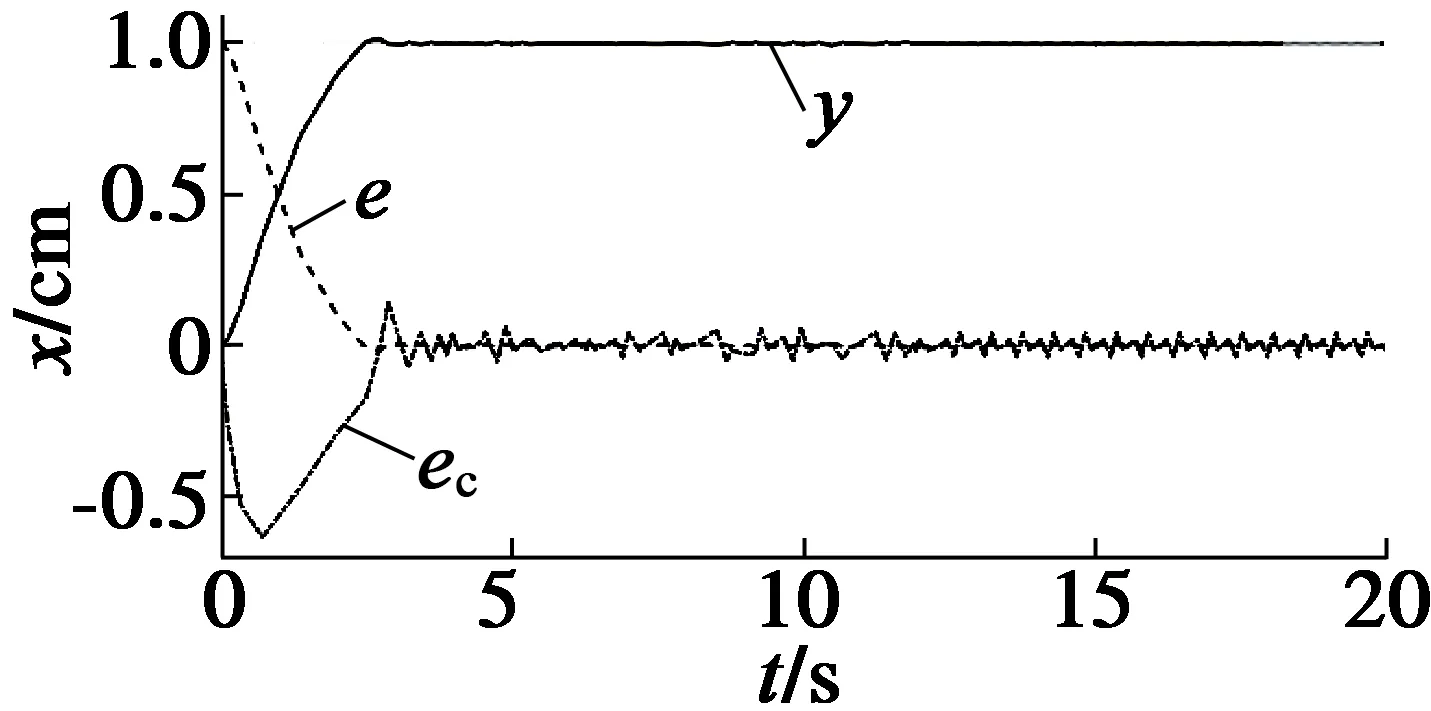
图10 滑模变结构仿真曲线
图11为滑模变结构扰动响应仿真曲线。增加扰动后,系统能够快速恢复,扰动超调量为5.8%,其动态响应和抗干扰能力相比传统PID控制和模糊PID控制有明显提升。但是抖振现象始终存在,不利于系统稳定,违背了激光雷达扫描成像的准确性原则。
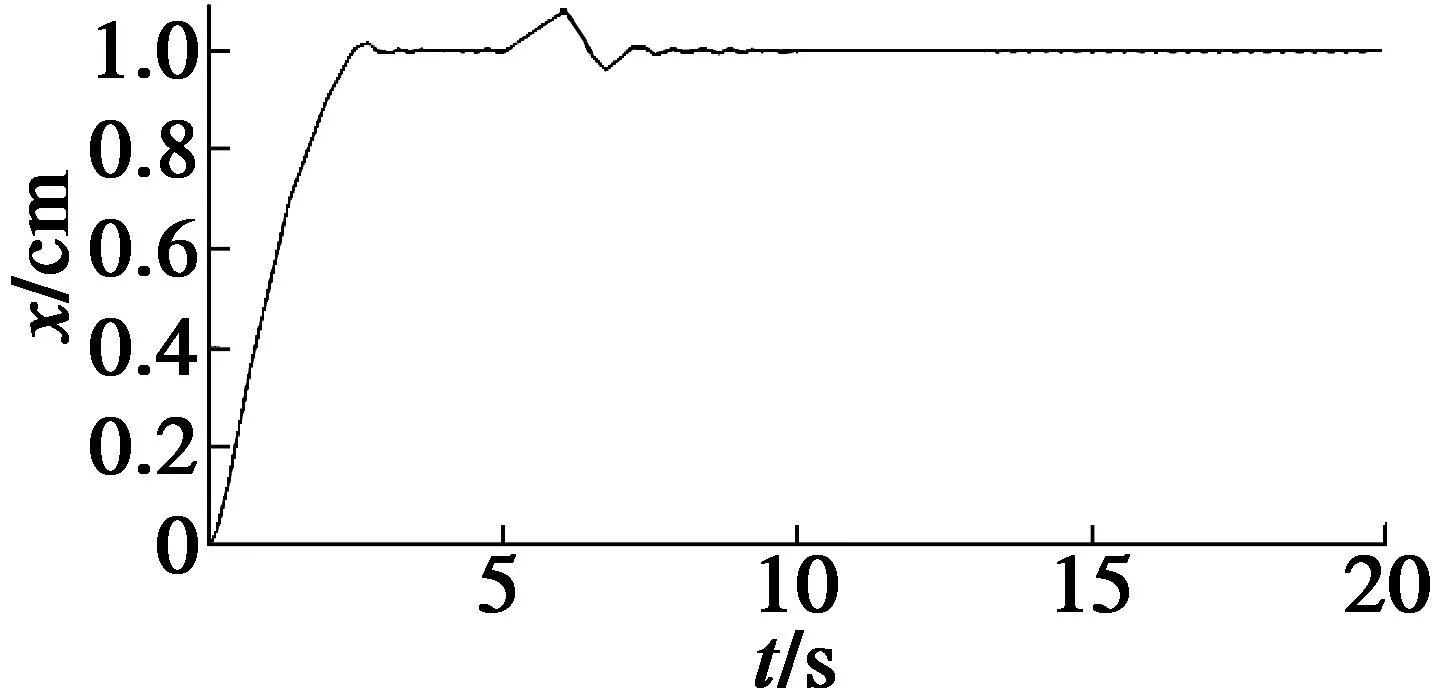
图11 滑模变结构扰动响应曲线
3.3 模糊滑模变结构仿真
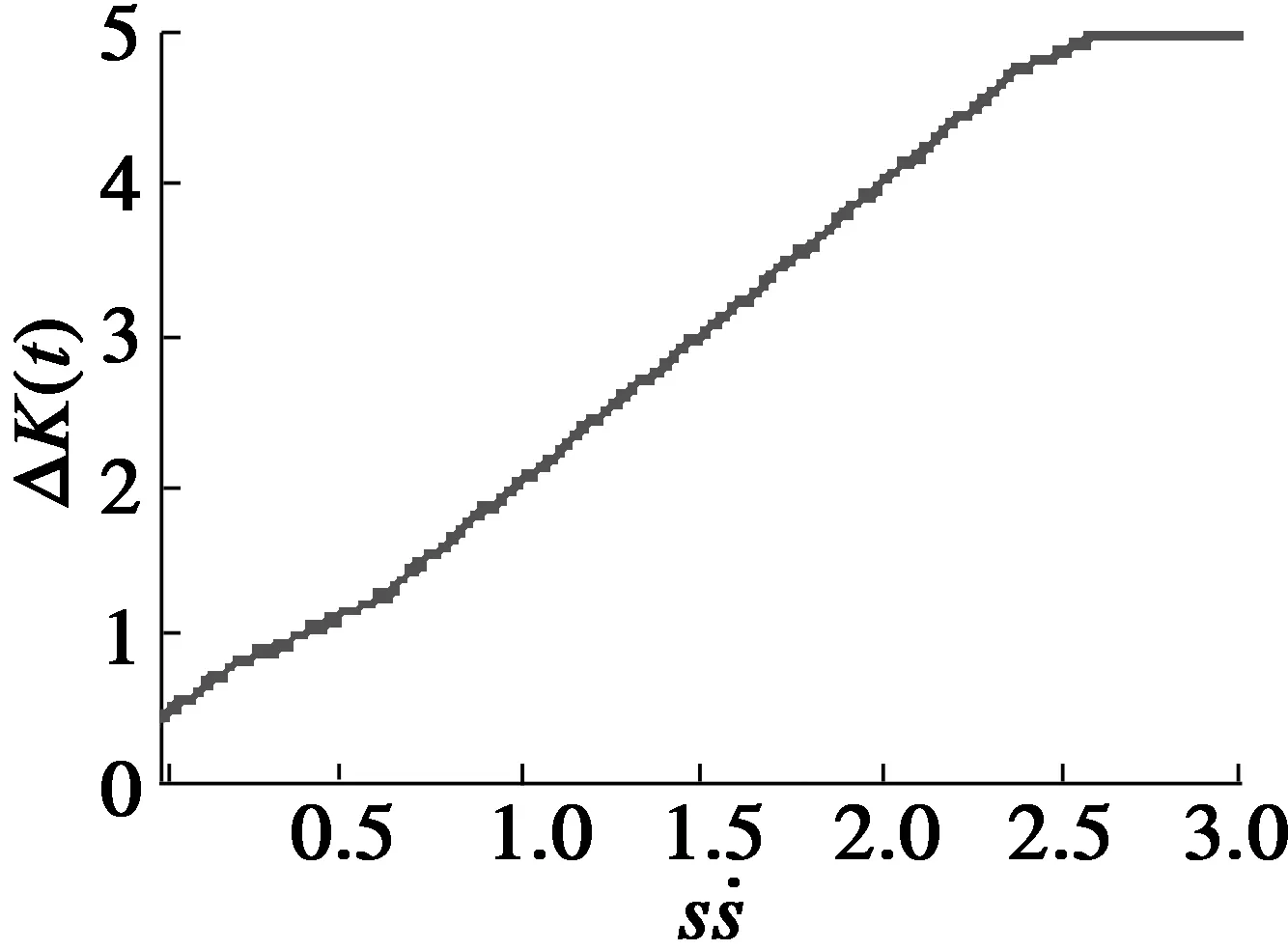
图12 模糊规则曲线
在Simulink中对扫描振镜位置环进行仿真,响应曲线y、位置误差e、速度误差ec如图13所示。与图10相比,模糊滑模变结构控制算法有效抑制了滑模控制系统带来的抖振现象,且控制效果优异,证明本文的模糊滑模变结构控制适用于激光雷达扫描振镜系统。
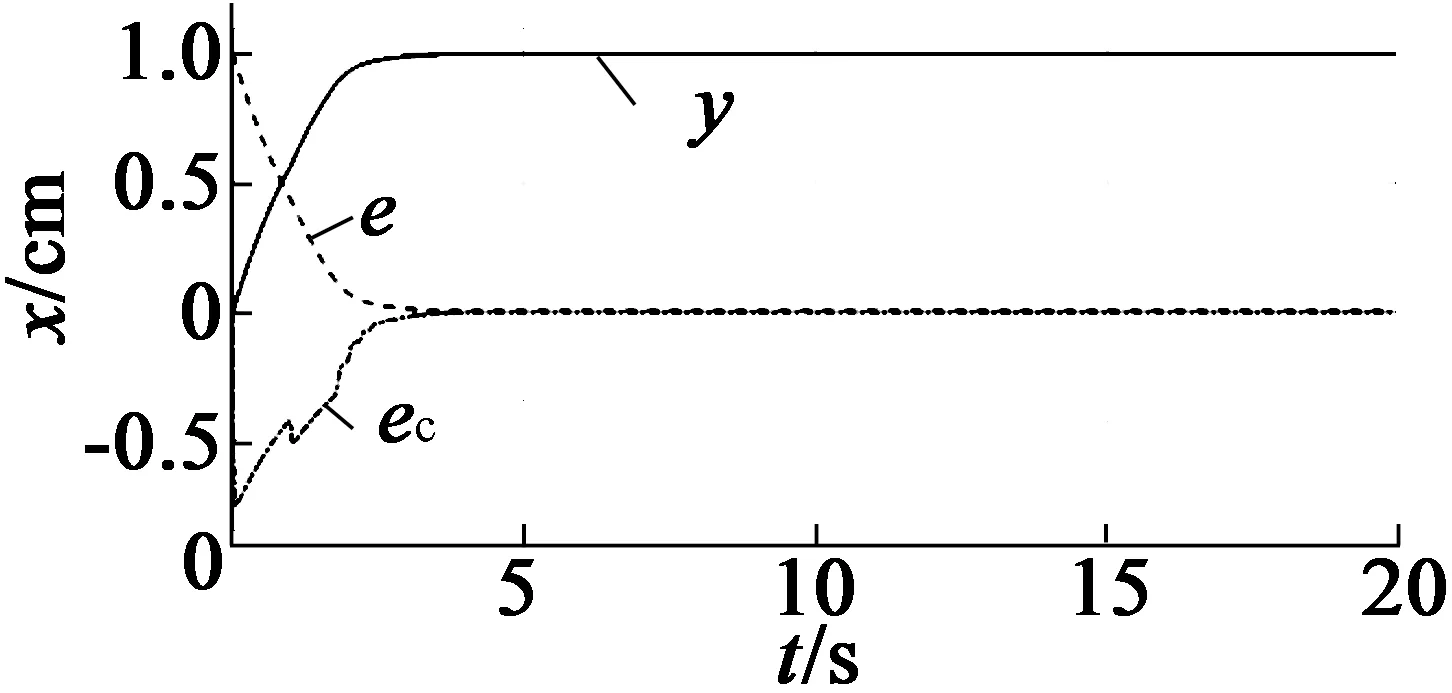
图13 模糊滑模变结构算法仿真曲线
系统运行第5 s时加入扰动,得到模糊滑模变结构扰动响应曲线,如图14所示。由图14曲线可知,当存在脉冲干扰时,系统有超调现象,超调量为7.2%,表明系统抗干扰性能优越,且无抖振现象。
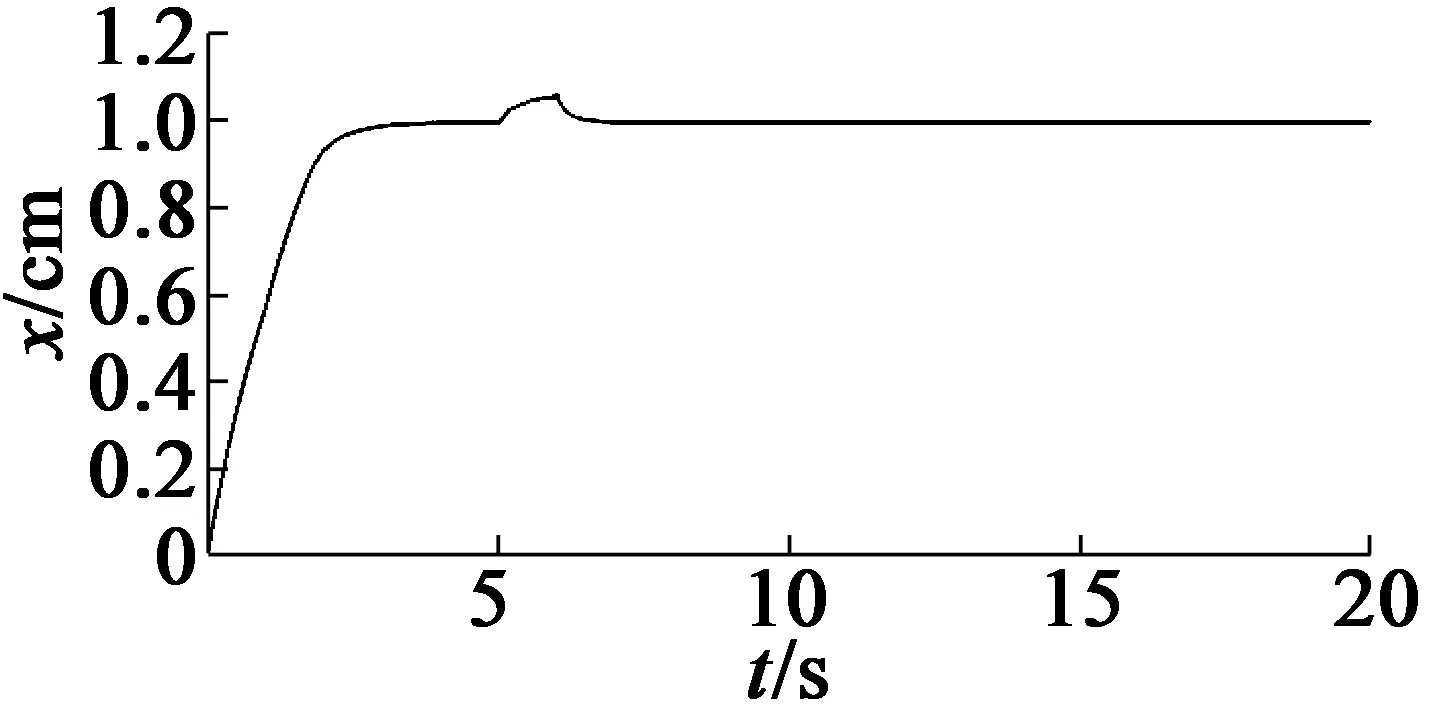
图14 模糊滑模变扰动响应曲线
3.4 原理样机结果
本文利用STM32F407、QT0707力矩电机、PSD传感器,搭建激光雷达扫描振镜硬件原理样机测试平台,如图15所示。采用模糊滑模变结构控制算法得到的PSD数据曲线如图16所示。
在实际系统中要求扫描振镜扫描频率50 Hz,扫描时间为16 ms,复位时间为4 ms。在实际测试中,扫描时间16.1 ms,复位时间3.9 ms,基本达到了期望性能。

图15 扫描振镜原理样机
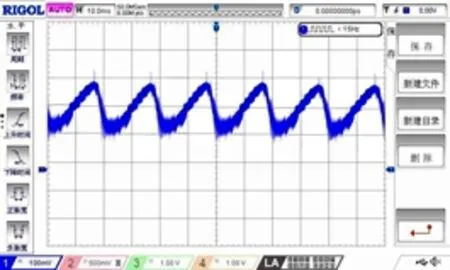
图16 PSD信号波形
分析图16可知,由于实验条件限制,PSD传感器会受到激光光斑大小以及实验室灯光影响,导致正程仍存在一定的抖振现象,反程存在一定超调。
4 结 语
本文建立了激光雷达扫描振镜数学模型,基于PSD位置环进行了模糊PID算法、滑模变结构算法研究并进行了对应的仿真实验,根据模糊PID控制、滑模变结构控制的弊端,提出了新的模糊滑模变结构控制算法,并在Simulink中进行了仿真实验。仿真结果表明,针对激光雷达中扫描振镜控制系统,传统PID可以实现对其控制,但传统PID抗干扰能力不足,无法满足扫描振镜精确控制的需求。模糊PID相比于传统PID算法,抗干扰性能提高,拥有良好的动态控制特性。滑模变结构控制算法在抗干扰性能方面相比于传统PID和模糊PID算法,有较大提升,但固有高频抖振现象限制了其在扫描振镜中的应用。为了解决滑模变结构控制算法这一缺陷,提出了模糊滑模变结构控制算法,将模糊规则融合到滑模变结构控制中,既保留了良好的抗干扰性能,又消除了抖振现象,适合应用于扫描振镜控制。原理样机实验结果与期望结果相符。
