消防机器人用中空两相混合式步进电动机设计
2019-11-25刘涛
刘 涛
(中国电子科技集团公司第二十一研究所,上海 200233)
0 引 言
消防机器人是一种特种机器人,随着社会经济的不断发展,其需求越来越明显。目前,它主要用于危险化学品和易燃易爆物品以及仓储和办公楼宇。消防机器人的出现可以帮助消防员及时获取火灾现场实时信息,甚至在无人状态实现自动灭火,它在消防救援中发挥了非常重要的作用[1]。
现今,大多数发达国家正不断推进消防机器人的升级进程,开始由低智能被动消防向高智能主动型机器人转变的研究工作[2]。国际上对消防机器人的研究大致可分为三个阶段,第一代是采用传统程序控制消防机器人,机器人本体只能通过固定程序进行消防工作;第二代消防机器人具有一定感觉功能,例如对烟雾与温度感应;第三代为智能化消防机器人,可以提前对现场进行检测及预判,主动实施消防工作[3]。目前,市面上常见的室内消防喷头主要采用温度或烟雾检测并大范围喷洒进行灭火,很难对着火点进行精确定位并实施喷淋。本文介绍一种新型智能消防机器人,可以通过红外监测着火点的温度及图像,同时实施精确定位,并对着火点进行小范围喷淋,达到快速精确灭火的效果。
本文介绍的混合式步进电动机主要用于消防机器人中的关节转向系统,是系统中的主要驱动动力元件。同时,此电动机具有体积紧凑、可靠性好、位置精度高等特点,同时在各种关节传动系统中有广泛的应用价值。
1 基本结构和原理
本文首先针对智能消防机器人使用环境的要求,通过分析不同转向关节的运行特性及安装结构的要求,采用分析软件对混合式步进电动机本体进行了电磁性能优化设计,设计出具有体积小、保持转矩高等特点的两相混合式步进电动机,并且采用了4倍细分的驱动控制方式,实现电动机装置的定位精度要求。
1.1 混合式步进电动机基本结构
电动机主要结构形式如图1所示。
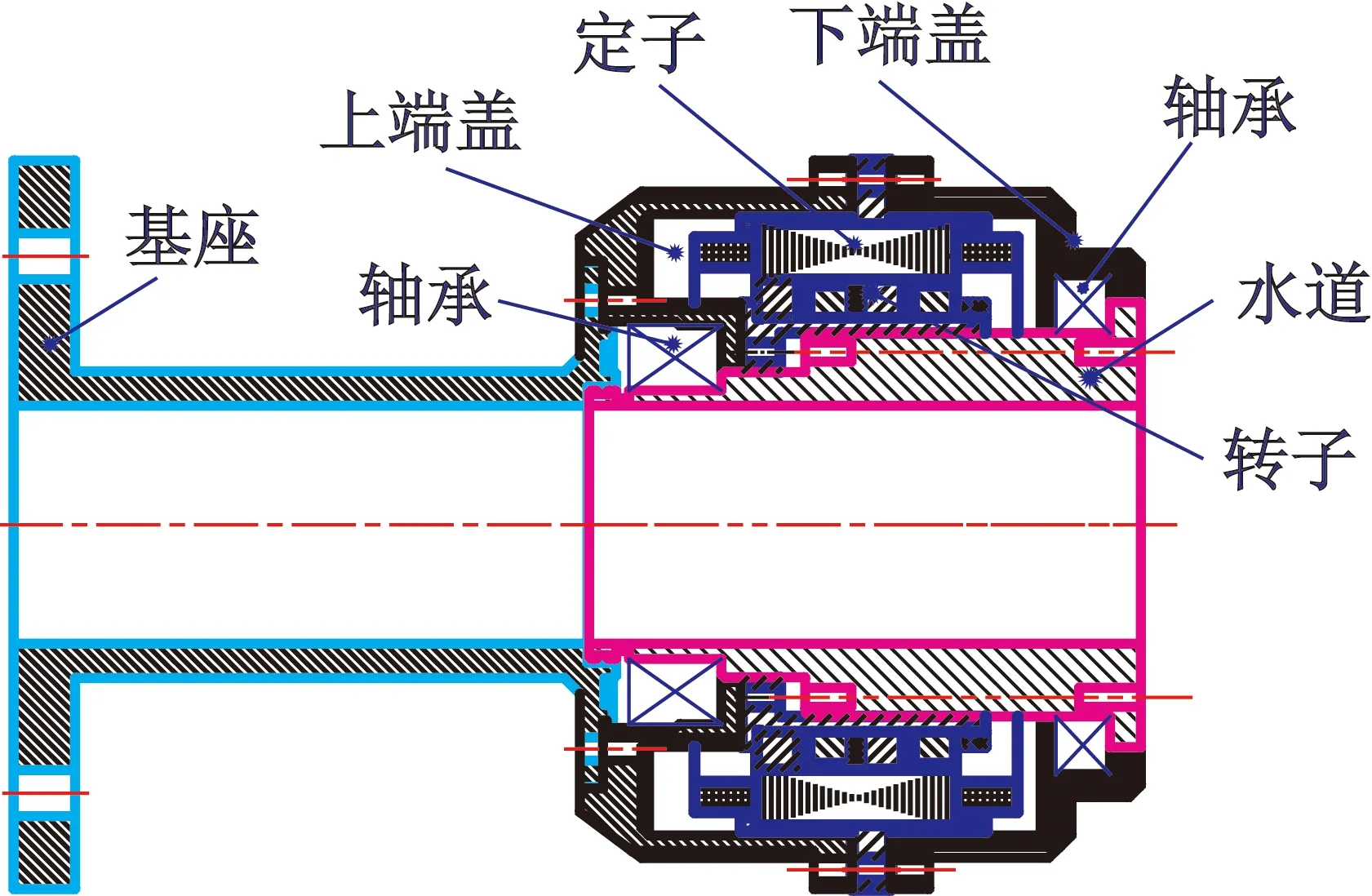
图1 混合式步进电动结构形式
电动机为组装式结构,采用扁平盘式结构的径向磁路,转子轴为中空结构,转轴内部有水流通过,定子通过热辐射传导热量,转子通过水道中的水流进行热量传递,确保整个电动机温度平衡。
1.2 主要工作原理
本电动机为径向磁路混合式步进电动机,电机定子铁心采用绕组镶嵌在定子槽中,两相绕组间隔一个槽距,转子采用稀土永磁材料作为永磁体。当定子绕组通电时,通电线圈产生一矢量磁场。该矢量磁场与转子磁极相互作用,电磁力带动电机转子旋转一个固定角度。每输入一个电脉冲,电机转子随着前进一步。电动机转子输出的角度与驱动器端输入的脉冲数成正比,电动机转速与输入脉冲的频率成正比。通过调节驱动器可以控制脉冲数量、频率及各相绕组的通电顺序,来控制步进电动机的运行。
2 设计内容
针对智能消防机器人关节转向系统对混合式步进电动机的要求,本文的主要研制内容如下。
2.1 电磁设计
根据用户的使用需求,在智能消防机器人关节转向系统运行时需要保证1°的位置定位精度,在定位完成后电动机需要输出大于1 N·m的保持转矩,以确保在大流量水流喷出时产生的反作用力下整个系统定位的稳定性。
针对用户的技术要求,本电动机设计转子齿数为100,每个齿距为3.6°,当电动机按两相双四拍运行时,步距角为3.6°/4=0.9°。
电动机的电磁转矩Te:
pImMsr(-iAsinθ+iBcosθ)
(1)
式中:p为电动机转子部分的细分齿数;Im为等效的永磁体励磁电流;L2为定子绕组自感基波分量;Msr为定转子之间互感的等效系数[4-5]。
二相激磁时,保持转矩计算:
(2)
2.2 一体化的结构设计
为了进一步减小智能消防机器人的体积,本电动机采用了电动机与消防水道嵌入式的结构形式,即电动机的转轴采用中空设计,消防水道与电机的转轴紧密结合在一起,定子部分采用环氧浇注。这种结构形式具有如下优点:
1) 采用嵌入式结构,消防喷水的水道与电机整体设计在一起,可以极大地减小电机整体空间,利用电机转子直接驱动喷水水道,控制喷水口的方位及旋转角度,达到精确控制喷洒区域的位置,确保喷洒的精准度。
2) 定子采用环氧整体浇注,可以将定子绕组与电动机内的水进行隔离,确保电机绕组的绝缘可靠性;同时采用环氧浇注方式,可以增强定子部分的整体机械强度,保证电动机在整体运行时可以有效地降低对外界冲击、振动;采用环氧浇注的方式还可以提高电机的整体散热效果,环氧将电动机绕组与壳体有效连接在一起,在确保绝缘要求的前提下采用高导热系数的环氧可以减小电动机的热阻,降低电动机散热的温度梯度,确保定子绕组产生的热量可以迅速地通过壳体散发。
2.3 自锁定设计
针对智能消防机器人的使用需求,在喷水运行时需要较大的保持转矩施加在电动机转动部件上,否则在大流量水流喷出时产生的反作用力会使转动关节偏转,这样电动机的定位精度就会受到很大的影响。针对这样的使用要求,通常采用的设计方式是在电动机同轴安装一个制动器,当电动机运行到指定位置时打开制动器,利用制动器产生的制动转矩将转子位置锁定,但是这样就需要同轴增加一个制动器,不仅提高了成本,增加了加工难度,同时还降低了可靠性。本文利用步进电动机的保持转矩来实现电动机的制动需求。当电动机旋转到指定位置时停下,在喷水开关打开之前给驱动器发出指令,给电机绕组通以一个较大的电流,电机产生较大的制动转矩将电机转轴固定,这样喷水装置喷淋时产生的反作用力就无法转动电机关节,达到精确定位的要求。
3 测试结果
两关节混合式步进电动机样机如图2所示,并对混合式步进电动机进行了测试。
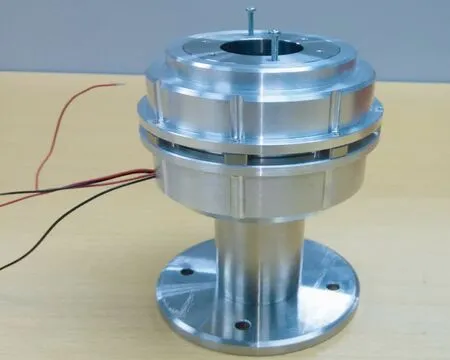
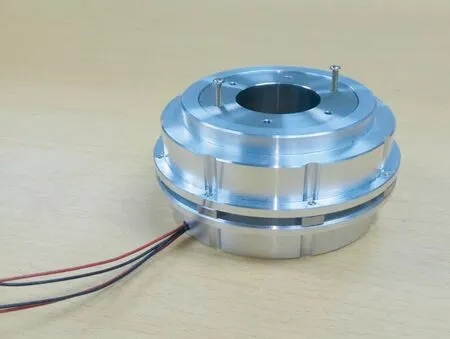
图2 两关节混合式步进电动机样机
电动机空载运行时输入电压28 V,电流0.34 A,转速240 r/min。电动机及控制器与智能消防机器人整体装配较好,电动机直接驱动质量为10 kg的喷水机构,接收到位置指令后,两关节步进电动机联动,驱动机器人喷水装置旋转到位后,驱动器给出制动指令,给电机绕组通电流3 A,产生保持转矩1.3 N·m。喷水时整个系统可以准确定位,喷洒面积完全覆盖指定区域,整个系统运行正常。
4 结 语
本文采用嵌入式结构设计,保证系统体积紧凑,降低了消防机器人的质量;通过特殊的中空转轴水道结构设计,确保了系统水流通行;采用两关节联动的方式,确保喷水系统对受控区域的全覆盖喷淋。
