3-RPS并联机器人动力学分析及模糊控制仿真
2019-11-22严智敏徐顺建简辉华
严智敏,徐顺建,简辉华
(新余学院 机电工程学院,江西 新余 338004)
0 引 言
目前,随着机器人技术的快速发展,并联机器人因精度高、 承载能力强、 刚度大等优点,被广泛应用于众多工业生产中,并且在勘探、 医学、 武器系统等诸多领域中也发挥了非常重要的作用[1]. 但由于并联机器人结构系统非常复杂,具有强耦合、 非线性的特点,导致其控制不便,严重影响了并联机器人的控制精度,而与并联机器人控制有最直接关系的是动力学方程的建立[2].
机构动力学研究的是机构运动与力之间的关系,范围很广,主要包括分析构件之间的相互受力关系、 利用机构的运动学分析进行机构的动力学建模、 计算机构的惯性力及动态仿真等[3]. 只有系统地分析机构在某种运动下与构件之间产生的力的相互关系,如不同的力对应机构不同的运动状态,才能更好地对机构进行有效的实时控制[4]. 其中建立数学模型,用数学函数模型代替机构模型作为控制对象,是实现并联机器人控制的基础. 数学模型越精确,对应的控制精度也越高[5]. 动力学模型的优劣直接反映出并联机器人控制精度的高低. 对于同一机构,不同的建模方法对机构控制的作用效果也会有很大的差异[6]. 近年来,国内外学者对并联机器人进行动力学建模的方法主要包括:拉格朗日法(Lagrange)、 牛顿-欧拉法(Newton-Euler)、 虚功原理法、 高斯法(Gauss)等[7]. 本文应用牛顿-欧拉法对3-RPS型并联机器人进行动力学分析,得出该并联机器人的驱动力、 约束力矩以及动平台对支链的作用力,建立动力学方程,在此基础上,应用Matlab构建仿真模型进行仿真分析,验证其精度及方法的正确性,为研究3-RPS并联机器人驱动位移轨迹跟踪控制作铺垫.
1 机构描述
3-RPS并联机构示意图如图 1 所示,该机构由上下两平台、 3支链连接组成,每条支链包涵三个运动副:转动副、 移动副、 球副. 转动副与固定平台相联,球副与动平台相联,中间通过移动副连接,该机构的驱动副为移动副.

图 1 3-RPS机构示意图Fig.1 Schematic diagram of 3-RPS mechanism
建立坐标系,上平台建立动坐标系P-UVW,下平台建立固定坐标系O-XYZ,P,O分别为上下平台的中心. 建立支链坐标系Ai-xiyizi,z轴方向为杆长的方向,x轴方向为OAi的延长线方向,y轴方向由右手定则确定. 上下平台分别记为B1B2B3,A1A2A3,其中,PBi,OAi,OBi分别记为bi,ai,qi,di表示驱动杆AiBi之间的杆长,φi为连杆AiBi与下平台之间的倾斜角,θi为转动副轴线ui与X轴之间的夹角,L为上平台三角形的边长.
2 逆运动学分析
2.1 位置分析
根据图 2 支链结构示意图,有如下关系式
ai+disi=P+bi,
(1)
式中:si表示在定坐标下zi轴的单位向量.

图 2 支链示意图Fig.2 Schematic diagram of the branch
则有
di=‖P+bi-ai‖,
(2)
si=(P+bi-ai)/di.
(3)
在固定坐标系中,支链固定杆和驱动杆质心的位置矢量分别为
r1i=ai+e1si,
(4)
r2i=ai+(di-e2)si,
(5)
式中:e1,e2如图 2 所示.
取欧拉角Z-Y-X型[8],α=0,则动坐标系相对于固定坐标系的方向余弦矩阵为

(6)
则动平台的角速度为

(7)

由图 1 可知,固定坐标系经两次旋转变换可得到支链坐标系Ai-xiyizi, 先绕Z轴旋转φi角,再绕新形成的Y1轴旋转ηi角,则支链坐标系相对固定坐标系的变换矩阵为[9]

(8)
由于转动副的约束作用,支链只能在xizi平面内转动,转轴为yi,则有φi为定值,且φ1=0,φ2=60°,φ3=120°. 由坐标变换有

(9)
2.2 速度和加速度分析
式(1)右边对时间求导得固定坐标系下球副中心Bi的速度为
vBi=vp+wp×bi.
(10)
由于vBi=ARiivBi,则有
ivBi=iRAvBi,
(11)
式中:ivBi表示Bi在Ai-xiyizi坐标系下的速度.
式(1)左边对时间求导得

(12)
式中:iwi,isi分别表示在Ai-xiyizi坐标系下支链的角速度和zi轴的单位向量.
对式(12)两边做向量运算并化简,可得
(13)
由于支链只能绕yi轴转动,则ivBi在yi轴上的分量为零,即ivBiy=0.
式(4),式(5)分别对时间求导,并依据上述所求得的值化简可得,在Ai-xiyizi坐标系下支链固定杆和驱动杆质心的速度
(14)

(15)
式中:ivBix,ivBiy,ivBiz分别表示ivBi在xi,yi,zi轴上的分量.
再对式(10)求导可得固定坐标系下球副中心Bi的加速度

(16)
且有
(17)
对式(12)求导同样也有

(18)
同理对式(18)两边做向量运算并化简得
(19)
式(14),式(15)分别对时间求导,并依据上述所求得的值化简可得,Ai-xiyizi坐标系下支链固定杆和驱动杆质心的加速度

(20)

(21)
3 动力学方程的建立
以动平台为研究对象,在动坐标系下,根据牛顿-欧拉方程可得动平台的力矩平衡方程[10]
(22)

动平台的力平衡方程[11]为

(23)

假设ifBi表示在支链坐标系下动平台对支链的作用力,则固定坐标系下和动坐标系下该支链作用于动平台上的力分别为
AfBi=ARiifBi,
(24)
BfBi=BRAAfBi=-BRiifBi.
(25)
联立式(6), (8), (22), (24)和(25),由于动平台关于其质心的惯性积为零,且Ipu=Ipv,则有

(26)

(27)
biv(a11ifBix+a12ifBiy+a13ifBiz)]+BNPw=

(28)
式中:右下标中的u,v,w分别表示该量在动坐标系下U,V,W轴上的分量;Ip表示动平台对于其质心的主惯性矩;Bwp=[wpuwpvwpw]表示动坐标系下动平台的角速度矢量.
联立式(6), (8), (23), (24)和(25)可得
ifBizcosφisinηi)+AFx=0,
(29)
ifBizsinφisinηi)+AFy=0,
(30)

(31)
联立式(26)~(31)可求得ifBiy,ifBiz,根据机构力平衡关系,则有3-RPS并联机器人所需的驱动力和约束力矩分别为

(32)
Mi=iMAix=diifBiy,
(33)
式中:iMAix表示在Ai-xiyizi坐标系下动平台作用于该支链下的约束力矩在xi轴上的分量.
以支链为研究对象,在支链坐标系下,根据牛顿-欧拉方程有[12]

(34)
式中:inAi,ihAi分别表示在支链坐标系下作用于Ai点的合外力矩和该支链关于Ai点的合角动量.
inAi=diisi×(-ifBi)+[m1e1+m2(di-
e2)](isi×iRAAg)+iMAi,
(35)
ihAi=m1e1(isi×iv1i)+m2(di-e2)(is1×iv2i)+
iI1iiwi+iI2iiwi,
(36)
式中:iI1i,iI2i分别表示支链固定杆和驱动杆关于各质心的转动惯量.
式(36)对时间求导得
(iI2iiwi).
(37)
联立式(34), (35)和(37)得

(38)
式中:I1iy,I2iy分别表示支链固定杆和驱动杆关于各自质心的主惯性矩在yi轴上的分量.
从而求得动平台对支链的作用力ifBi=[ifBixifBiyifbiz]T.
4 模糊控制仿真分析
为了满足该机构能够实现高精度、 快速响应、 结构紧凑的运动特点,综合各方面的因素[13],考虑机构实现的是直线运动,对于3-RPS型并联机器人,选择液压伺服驱动作为驱动器,采用液压伺服系统的闭环传递函数[14]

(39)
给定驱动器的参数:KV=0.06,ωh=320,δh=0.2,Vt=1.4×10-4,KCE=6.14×10-12,βe=7×108,A1=4.9×10-4,Ft=1 000,将其代入传递函数中得
选用模糊控制方法[15],应用Matlab软件建立控制模型进行仿真分析.
应用Matlab的FIS编辑器建立模糊控制器,构建模糊控制模型进行仿真,如图 3 所示.
经过多次仿真实验,调节量化因子ke,kec和比例因子ku,使其控制精度达到最佳状态时,ke=0.3×10-3,kec=0.2×10-7,ku=5×107. 仿真时间为10 s,仿真结果如图 4 所示.
仿真结果表明:采用模糊控制在轨迹跟踪控制中有一定的控制精度; 在系统一开始时就出现迅速响应,运行到0.2 s时就有一定的跟踪精度,并且跟踪的最大误差为1.1 mm,跟踪精度较高; 同时验证了采用牛顿-欧拉方法对3-RPS并联机器人动力学分析正确性.

图 3 模糊控制仿真模型Fig.3 Simulation model of fuzzy control
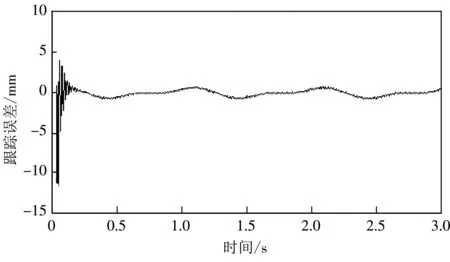
图 4 模糊控制轨迹跟踪误差Fig.4 Trajectory tracking error of fuzzy control
5 结 论
本文以3-RPS并联机器人的动平台以及各支链为研究对象,应用牛顿-欧拉方法,分析了该并联机器人支链杆件对动平台的驱动力、 约束力矩以及动平台对支链的作用力,构建了动力学方程. 基于Matlab仿真软件,采用液压伺服驱动方式及模糊控制算法,构建了模糊控制仿真模型来进行仿真分析,表明采用模糊控制在轨迹跟踪控制中有一定的控制精度,验证了采用牛顿-欧拉方法对3-RPS并联机器人动力学分析的正确性及控制方法的有效性,为进一步采用模糊PID控制、 滑膜控制等其它控制方法对3-RPS并联机器人轨迹跟踪控制研究,以及提高并联机器人控制精度提供一定的理论基础.
