一种抗同频异步干扰方法的研究与实现
2019-11-19常艳,付涛,邵亮
常 艳,付 涛,邵 亮
(中国航空工业集团公司雷华电子技术研究所,江苏 无锡 214063)
0 引言
根据实际工作需要,某些飞机编队作战过程中,在近距离上,由于多部飞机雷达间辐射干扰的基本特征为同频、单向、高功率,主瓣干扰和副瓣干扰同时存在[1],以及全方位干扰。该飞机雷达相邻频点间频差较小,相邻频点的发射信号经PRF 调制后会产生同频异步干扰[2]。其影响主要在3 个方面:
1)影响雷达兵对目标的及时发现,特别是影响对导弹等小目标的观测。当存在同频干扰时,雷达显示画面基本被干扰所占据,无法有效地分辨目标。真实目标回波淹没在干扰信号之中,导致雷达信杂比下降,降低了雷达的作用距离。
2)破坏雷达对目标的连续跟踪。如果同频干扰出现在跟踪波门内,将导致跟踪目标丢失,即使已经建立自动跟踪的目标。当该目标为打击目标时,将严重影响雷达对指控系统和武器系统的目标指示。
3)使雷达的抗干扰能力急剧下降。同频干扰本身就是有源干扰,加上实战中敌方的压制性干扰,一些针对敌方压制性干扰的抗干扰措施将受到严重影响(如角跟踪干扰源),雷达将很难正常发挥其性能。所以雷达的整体抗干扰能力将严重削弱。
如何避免该飞机编队作战时的同频干扰问题,也成为亟待解决的问题,在很多文献中,大部分针对算法进行仿真,而本文重在结合实际情况的算法改进和工程实现,经过验证,时域反异步处理法对同频异步干扰的抑制效果显著。
1 时域反异步算法原理
时域反异步处理技术是现有雷达相对比较成熟且有效的抗同频异步干扰方法,理论上,其可以通过时域处理的方式实现抗同频异步干扰[3]。
现有反异步处理技术主要有相邻周期反异步处理和时域多脉冲相关等[4]。
1.1 相邻周期反异步算法
通常的反异步算法认为是一种相邻周期反异步算法。对于正常目标信号,在同一帧中,每个周期的延时不变。而对于同频异步干扰,由于各雷达的发射脉冲重复频率不同,相邻周期的干扰信号延时不同[6]。通过在时域上检测杂乱脉冲并对其进行相应处理,可降低干扰脉冲功率,改善雷达在同频异步干扰条件下的探测和跟踪性能[5]。
根据同频异步干扰杂波的非相关性,利用相邻脉冲间接收信号相减来发现异步干扰,其差大于某个门限时[7],可判为异步干扰,并在距离门上置出异步干扰标志,此方法可以最大限度滤除异步干扰。事实上,如果在目标距离单元上异步大信号和目标小信号重叠,反异步算法会将该距离单元上信号屏蔽输出,由于正常目标信号是相关的,当前值用上一周期同距离单元上信号的加权值取代异步大信号作为下一周期的“上一周期的比较值”是合理的。
相邻周期反异步改进算法首先判别当前信号是否为异步信号[9],如果不是异步信号,当前值被原值存储下来作为下一周期的“上一周期的比较值”[8];若是异步信号,当前值不存储,而是将上一周期的信号值加权后存储下来作为下一周期的“上一周期的比较值”。
1.2 时域多脉冲相关法
时域多脉冲相关法是一种多周期数据联合运算反异步干扰技术[10]。以M 个脉冲距离单元为例进行存储,使用相关判决算法进行判决输出:根据设定的门限,判为回波的数据,作保留处理;否则,认为是同频异步干扰,对该距离门回波做置零处理。下面以3 个雷达重复周期为例。
设相邻3 个雷达重复周期某一距离单元上接收的信号依次为D1、D2、D3,它们与其各自的门限进行比较得到状态位S1、S2、S3,各状态位超过设定阈值门限的为“1”,低于设定阈值门限的为“0”,根据目标回波和异步干扰的特点,目标回波在相邻脉冲之间是稳定的[12],而异步干扰不同,它在这一距离单元上只会出现一个,通过上述特点进行目标回波和异步干扰的识别[11]。如果连续2 个(3 个)脉冲的判别状态结果为“1”,则认为是目标回波;当比较结果为S1S2S3=010 时,则D2被判为异步干扰信号;当比较结果为S1S2S3=001、100 或101 时,判断为随机噪声[13],具体对应关系如表1 所示。
2 时域反异步算法实现
针对上节中两种算法的比较,时域多脉冲法,需要对相邻多个脉冲的干扰脉冲检测结果进行相关[14],作进一步干扰确认,方法更严谨,效果更明显,因此,采用时域多脉冲法进行抗同频异步干扰处理[15]。时域多脉冲相关算法,以相邻周期差值干扰门限判断进行比较,不同的是,需要对相邻多个脉冲的干扰脉冲检测结果进行相关,作进一步干扰确认,确定为干扰后,在相应位置置零或噪声以去除干扰,进入下一阶段的信号处理。具体处理流程如下页图1 所示。
2.1 选取时域信号
时域信号为二维矩阵形式X∑,矩阵大小L×M,其中,L 代表距离门个数,M 代表雷达相参积累脉冲个数。高重频工作状态下,L 值为8 个距离门,M 值即积累个数为1 024,中重频工作状态下,L 值视采样情况而定,M 值即积累个数为256。
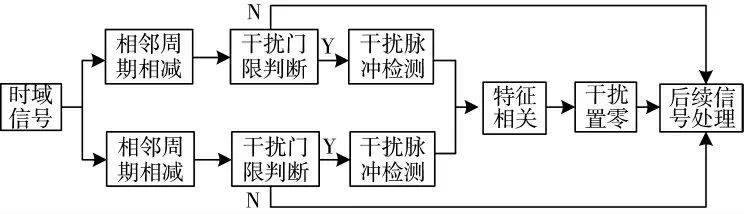
图1 时域多脉冲相关算法处理流程图
X∑参与的样本点数为:K=L×N 点。
2.2 相邻周期相减处理
根据同频异步干扰的特征,在近距离上,多部机载雷达间的辐射干扰的基本特征为同频、单向、高功率,主瓣干扰和副瓣干扰同时存在,以及全方位干扰,利用其高功率的特点,对相邻周期的信号相减,再与干扰门限值进行比较。
2.3 干扰门限的选择与判断
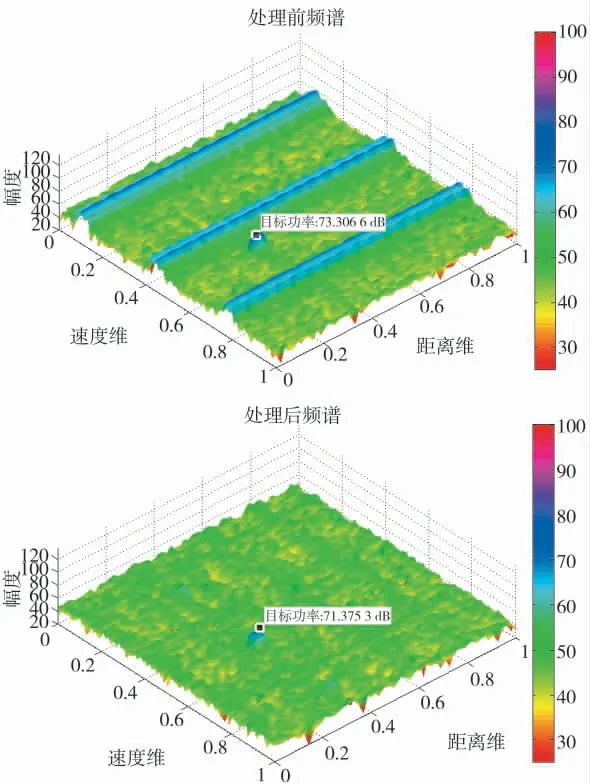
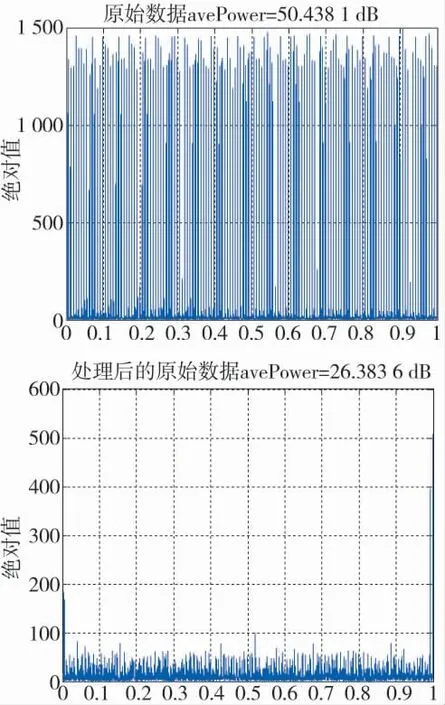
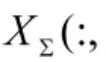
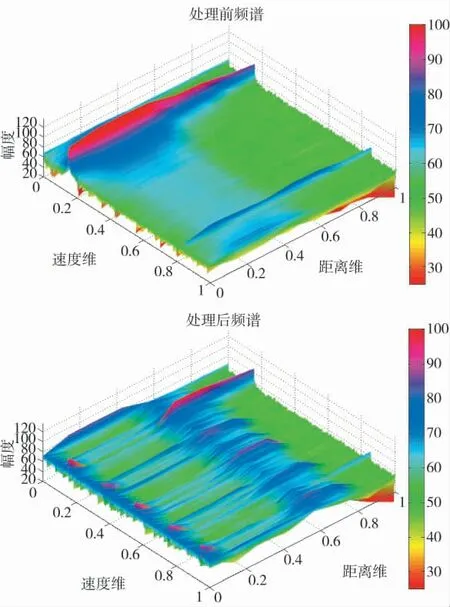
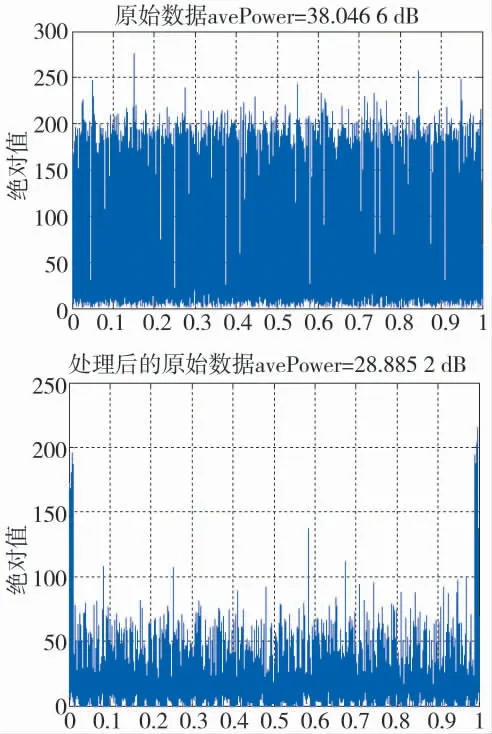
是否选择合适的干扰门限影响着抗同频异步干扰处理效果,由反异步干扰处理原理可知,在进行反异步干扰处理时,需要设置一个判断门限,此门限的选取应以尽量不衰减正常目标信号,同时对干扰滤除有较好效果为原则,以SNR(目标信噪比)10dB,JNR(干扰信号干噪比)30 dB 为例,DNR 必须满足0 通过上述的几个过程处理后,将相应位置的干扰置零或噪声,最后输出去掉同频异步干扰的信号。 通过上述算法的设计处理,对PRI 相近、PRI 周期相差较多、PRI 周期相差较少3 种情况作同频异步干扰的数据分析,其中Trs代表雷达信号,Trj代表干扰信号。 1)雷达PRI 与干扰PRI 相近(小于一个脉宽,或成整数倍小于一个脉宽)。 Trs的脉冲周期为PRI1,Trj的脉冲周期为PRI2,按照PRI1≈PRI2 比例进行设置,图2、图3 分别为原始数据及反异步干扰处理后时域、频域图。雷达工作于前半球状态,图中绿色部分为背景噪声,红蓝色部分为目标和干扰信号。 图2 原始时域信号与处理后时域信号对比图 图3 原始频谱与处理后频谱对比图 当雷达PRI 与干扰PRI 相近时,对信干比和平均噪声功率有明显改善,但是目标仍然淹没在干扰中,对干扰无抑制效果。 2)雷达PRI 与干扰PRI 周期相差较多(差值相当于N 倍脉宽)。 Trs的脉冲周期为PRI1,Trj的脉冲周期为PRI2,按照PRI1≈5PRI2 比例进行设置。图4、图5分别为原始数据及反异步干扰处理后时域、频域对比图。雷达工作于后半球状态,图中绿色部分为背景噪声,蓝色条带部分为干扰信号,蓝色打标部分为目标。雷达PRI 与干扰PRI 周期相差较多时,进行反异步处理后,干扰大部分被滤除,信干比和平均噪声功率有明显改善,但由于被干扰覆盖的目标随干扰同时被滤除,导致目标功率衰减,可以检测到清晰的目标。 图4 原始时域信号与处理后时域信号对比图 3)雷达PRI 与干扰PRI 周期相差较少。 Trs的脉冲周期为PRIT1,Trj的周期为PRIT2,按照PRI1≈1.5PRIT2 比例进行设置。图6、下页图7分别为原始数据及反异步干扰处理后时域、频域图。雷达工作于后半球状态,图中绿色部分为背景噪声,蓝色条带部分为干扰信号,绿色打标部分为目标。雷达PRI 与干扰PRI 周期相差较少时,进行反异步处理后,干扰滤除明显,虽然仍然有部分Sinc谱边带,信干比和平均噪声功率有显著改善,目标清晰可见。 通过时域反异步处理抗同频异步干扰,使用某雷达平台仿真与验证,该种方法对抗制同频异步干扰有效。 在飞机编队中,可以考虑让工作在同一频点的飞机工作在不同半球(或均工作在后半球),也可对飞机雷达脉冲重复周期进行合理选择,以达到错开脉冲重复周期的目的,使抗干扰效果更显著。 图5 原始频谱与处理后频谱对比图 图6 原始时域信号与处理后时域信号对比图 图7 原始频谱与处理后频谱对比图2.4 干扰特征的相关
2.5 干扰去零或噪声处理
3 实际工程数据分析

4 结论