三维激光扫描技术在滑坡变形监测中的应用
2019-11-12田鹏
田鹏
(新疆维吾尔自治区第二测绘院,新疆 乌鲁木齐 830000)
1 引言
滑坡是自然灾害中危害性大且频发的事件,会危及人民生命和财产安全,给国民经济带来严重损失。采用合理的监测手段来预测滑坡发生时间,提前做好预防措施,可以尽可能地减少乃至防止滑坡造成的损失,达到预防滑坡灾害的效果。因此,开展滑坡变形监测,对了解滑坡变形状况具有重要的现实意义。
近年来,我国有不少学者对滑坡监测做出了一定贡献,例如,褚宏亮对地形构建数字高程模型(Digital Elevation Model,简称DEM),来推断滑坡形变趋势和形变量[1]。刘锦程通过建立滑坡体高精度DEM,对土方量进行比较,从而对滑坡变形进行分析[2]。刘昌军运用改进后的基于八叉树的Hausdorff 距离算法,实现了两期点云数据的直接比较[3]。姚艳丽等通过实验验证了灰色模型应用于滑坡控制点三维坐标位移预测的适用性[4]。郭献涛等提出了用最小二乘三维表面匹配算法来获取滑坡变形信息[5]。这一系列研究都对滑坡变形监测做出了贡献,但这些方法与三维激光扫描技术相比,在数据获取速度、监测点包含信息等方面有着质的差别。利用三维激光扫描技术可以快速获取大量滑坡表面点云,经过数据处理及建模后可以得到滑坡体地表的整体变化信息,可以更直观地观测滑坡体变化[6]。
2 滑坡变形监测方法分析
2.1 全站仪测量技术的变形监测方法
基于全站仪测量技术的变形监测方法,通常是指利用常规的光学或者电子测量仪器,采用周期性的大地测量技术来测量角度、距离、高差等数据,再通过构网法、交会法、极坐标法、测线法等,监测滑坡体的位移,进而得到变形的方向、速度和加速度等数据。监测精度最高能达到毫米级,符合变形监测要求,是目前应用最广泛的测量方法之一。
2.2 精密近景摄影测量变形监测方法
利用精密近景摄影测量变形监测方法,将监测点固定设置在待监测的滑坡体周围稳定区域,分时段对监测点进行测量,经过专业软件分析处理后得到变形监测点的三维坐标,最后通过分析监测点不同时期的坐标变化差值来得到滑坡的情况。这一方法不需要接触物体,适合各种恶劣环境,但设备昂贵,而且监测质量不佳。
2.3 GPS 变形监测方法
在滑坡体表面任何地点、任何时刻,用接收机在高度角200 以上观测到4 ~5 颗卫星发射的信号,通过接收机体来测定目前点位至卫星的距离,经技术处理后,得到待测点位的三维坐标。利用GPS 变形监测方法可以全天候进行监测,同时可测定点的三维位移,测量精度高,但是点位选择的自由度较低,且算法复杂。
2.4 基于三维激光扫描技术的变形监测方法
三维激光扫描技术是一种非接触式测量方法,也是快速有效获取体表数据的方式之一,可利用激光扫描获取真实可靠的数据,直观反映滑坡体表面的实时形态。该方法测量精度高,测量范围广,可以更加直观地呈现滑坡体的变形情况。
3 三维激光扫描技术基本原理
三维激光扫描技术运用脉冲测距法来测量被测点与观测站之间的距离,然后,再测量横向观测角和纵向观测角,得到相应数据后通过公式计算便可得出任意测量点的三维坐标。三维激光扫描工作原理如图1所示。

图 1 三维激光扫描工作原理
4 点云数据的处理
4.1 去除噪声
实际测量过程中,因受到被观测体表面环境复杂、测量仪器精度、工作人员的经验等因素影响,会产生一些测量误差点,影响后续的模型建立。因此,为了减少误差,需要尽可能地去除这些噪声点。通过肉眼判定,可以直接删除易判别的异常点和散乱点;一般情况下,激光扫描仪的高度不变,通过与参照的高度值进行对比,删除高度偏差较大的点。
4.2 点云拼接
点云拼接可以通过数据或者图形进行。通过数据拼接,一般要求各点云间有明显特征,即在扫描的点云中有同名点的存在。如果特征不明显,可以在测量目标上人工粘贴一些特征点,如标靶等。通过图形拼接,要对点云的局部造型进行处理,然后再拼接,但是通常情况下局部造型比较难处理,拼接效率太低。拼接完成后还需去掉各点云重叠的冗余数据,才能得到一个完整点云。
4.3 点云滤波
点云滤波主要有曲率滤波、平均滤波和高斯滤波三种方法。曲率滤波法的关键是分析曲率的变化,通过变化来选取数据,在曲率变化大的地方多选取数据,在曲率变化小的地方尽量少选取数据,这样就可以过滤掉大部分点位。平均滤波法只需取各个点的平均值。高斯滤波法相对复杂,需要把指定的区域内点位进行高斯分布,这样影响效果较小,能比较好地保留数据原貌。
5 滑坡变形监测与分析
本文以横琴小区的小区域滑坡作为研究对象,在小区域的滑坡体上选取4 个点位来安置观测装置,分两期采集滑坡体监测数据,将各个站点采集的数据进行坐标拼接,然后处理有组织的点云数据,对得出的两期数据进行对比,并分析滑坡体的变形情况。
将三维激光扫描仪架设在各个测量点上,然后严格按照相关规范要求进行对中、整平。对各监测点进行监测时,首先选取一控制点作为后视点进行定向。为避免三维激光扫描仪在测量中存在误差,观测一次后要取下仪器,再按照以上步骤重复对各点进行观测,以消除测量数据误差。测试过程中除需要消除仪器本身存在的误差外,还需要避免测量中的定向中误差,在同一站上连续进行两次后视定向,定向中使用同一个标靶且严格按照要求重置于后视点上,对各点观测两次,采集监测点的数据,并进行处理。
本文对测量标靶精确扫描后提取了标靶中心的点位坐标,统计结果如表1 所示。从两次滑坡体监测数据可以看出,X方向上最小误差绝对值为0mm,最大误差绝对值为5mm;Y方向上最小误差绝对值为1mm,最大误差绝对值为2mm;高程方向上最小误差绝对值为1mm,最大误差绝对值为6mm,点位中误差为 3.49mm,高程中误差为5.01mm。两次观测获取的数据存在一定误差,主要是由仪器对中误差、仪器量取误差、定向误差和部分系统误差等引起的。通过三维激光扫描技术对小区域滑坡体表面进行测量分析,可知该区域滑坡体3D 滑坡值标准差远未达到预警值。因此,该小区滑坡体在监测期间处于稳定状态,没有蠕动及快速滑动现象。
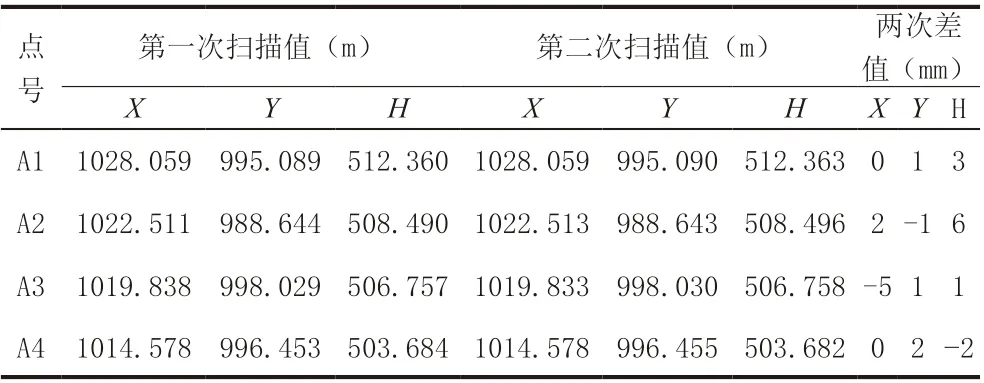
表1 小区域滑坡体监测数据
根据《滑坡、崩塌监测测量规范》的要求,滑坡体监测点的施测精度必须满足表2 中各监测等级的要求。
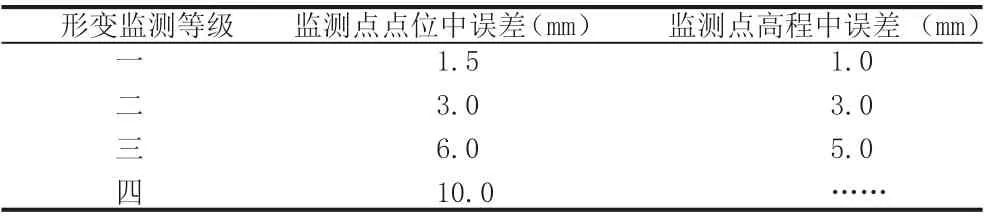
表2 滑坡体监测点的施测精度
通过与表2 中各等级滑坡监测点的施测精度进行对比,可以看出,本次监测的点位中误差最大值为5mm,满足三等监测的精度要求;高程中误差最大点为A2,其高程中误差为6mm,略微超出三等监测的限差范围,但其余三个监测点的高程中误差均满足三等监测的要求。在监测中严格按照步骤操作,减少人为误差,利用三维激光扫描仪对小区域滑坡体进行监测,平面精度和高程精度均能达到三等监测的精度要求。
6 结论
本文以横琴小区的小区域滑坡作为研究对象,详细分析了三维激光扫描技术在滑坡变形监测中的应用。利用三维激光扫描技术开展小区域监测,具有时间短、精度高的特点,但在实际监测工作中要得到更精确的结果,还有许多问题需要研究,只有监测结果更加精确,才能对滑坡进行有效预警。
