基于SIAR算法的导引头角度估计系统研究
2019-11-12石振星
张 燕, 张 弦, 张 雪, 石振星, 马 亮
(上海无线电设备研究所,上海201109)
0 引言
隐身和反隐身技术的研究始于第二次世界大战期间,迄今已成为现代高科技战争的一个显著特征。隐身技术是指改变己方武器装备的可探测特征,从而不易被敌方探测系统发现或缩短发现距离的综合性技术。在1991年海湾战争、1999年科索沃战争和2003年伊拉克战争中,隐身技术都展示了出众的突防能力和作战效能。F-117 A隐身战斗机、B-2 A隐身轰炸机和F-22先进战术隐身战斗机是隐身技术的杰出代表[1-4]。但是,隐身目标并不是不可探测的。现有或研制中的隐身飞机往往用来对抗单站雷达或雷达导引头,并且难以在整个电磁波谱都保持低可观测性[2-3]。所以,只要发展新式雷达导引头探测系统,扩大雷达导引头在频域、空域的探测范围和能力,就能有效对抗隐身技术的威胁。本文提出的米波反隐身导引头通过两个方面来提高隐身目标的RCS:一是选择米波工作频段,隐身飞机大多数都是针对1 GHz~20 GHz的雷达频率。如果频率改变,隐身效果就会减弱,米波波长在米级,由于目标尺寸与波长关系属于谐振区,会形成较强的反射回波尖峰,通常米波RCS比微波RCS大几十甚至几百倍;二是采用半主动导引头探测方式,导引头从隐身目标的上方或侧方来探测目标,提高隐身目标的RCS。
米波反隐身技术十分有效,但是米波波长较长,波束宽度通常太宽,角度测量精度和分辨力通常较低。要在米波段得到较窄的照射波束,满足导引头角度测量精度要求,则要求导引头天线口径较大,难以满足弹载体积要求。为解决米波导引头角度测量精度问题,本文提出了一种新体制的反隐身米波导引头角度测量技术——基于SIAR算法的导引头角度测量技术,采用SIAR算法,利用大的地面阵列雷达孔径,得到高的导引头测角精度,满足米波半主动雷达导引头测角精度要求。
1976年,法国国家宇航研究局(ONERA)根据一种新型防空雷达的设想提出SIAR算法,并于上世纪八十年代后期,和汤姆逊-CSF公司联合研制了性能样机,在实验系统上对该方案进行了验证[5-6]。上世纪八十年代末,西安电子科技大学雷达信号处理国家重点实验室和中国电子科技集团第38所开始对SIAR算法进行研究,并在上世纪九十年代由两家共同完成了米波稀布阵综合脉冲与孔径雷达系统[7-8]。
近年来,SIAR处理应用于实际雷达系统的研究受到普遍关注。从国内公开发表的文献来看,米波导引头角度估计系统研究较少。本文建立了米波导引头角度估计系统,给出了信号处理流程,并用实验结果证实了系统的有效性。
1 基于SIAR算法的半主动寻的制导系统
图1 传统半主动寻的制导系统组成
传统的半主动寻的制导系统,一般由照射雷达和单脉冲测角导引头组成,如图1所示。照射雷达一般采用相控阵雷达,采用窄发射波束实时照射目标。导弹上的导引头采用单脉冲天线接收搜索寻找目标散射的回波信号,通过将单脉冲天线接收的“差波束”与“和波束”进行比幅计算,即可得到目标相对于导弹的方位和角度信息,控制天线实现目标的角速度跟踪,同时形成制导信号,通过比例导航引导导弹攻击目标。
与传统的相控阵照射雷达不同,基于SIAR算法的半主动寻的制导系统中,地面阵列雷达采用固定的相位,不进行相位调整。各个发射阵元采用全向照射,且这些信号在空间是相互正交的。发射信号的相位是固定的,对于不同的方向,相对于平面波前,各阵元发射信号的波程差是不同的,所有发射信号经目标反射后,由导引头上的无方向性接收天线接收。由于各个阵元信号是相互正交的,可在接收机中将各个阵元对应的信号分离开。接着对分离后的信号作相位调整和幅度加权。不难看出,在这里调整相位和幅度与在地面发射阵调整相位的过程是互逆和等效的。将调整后的信号进行求和,得到匹配输出,即相当于调整地面发射阵方向,如图2所示。
图2 基于SIAR算法的半主动寻的制导系统组成
接收端信号的分离、调相、幅度加权、求和处理,相当于脉冲匹配滤波。接收端通过弹载的惯导装置获取导弹相对于照射站的位置,通过导弹、目标、地面站的相对位置,即可计算出目标相对于导弹的角度和位置信息,形成制导指令控制导弹攻击目标。
2 基于SIAR算法的导引头角度估计系统模型
基于SIAR算法的半主动导引头角度估计系统模型,如图3所示。

图3 基于SIAR算法的半主动导引头角度估计系统模型
阵列天线照射的反隐身半主动导引头是一个多发单收的雷达系统。发射天线阵是一个N行M列的均匀平面矩形阵列,接收天线为全向天线。接收天线接收回波信号,用于测角和测距。
2.1 回波信号
发射阵元发射载频为fk=f0+Δfk的线性调频信号,脉冲宽度为Tm,其中f0为中心载频,Δf为载频间隔,则第k路发射信号sk(t)可表示为

回波信号可表示如下

2.2 信号预处理
第k路基准信号sko(t)为

收到的合成信号sz(t)与第k路基准信号sko(t)进行复混频:
经过低通滤波,得到第k路信号输出信号skx(t)为

2.3 数字波束合成(DBF)和多维匹配滤波

式中:2πfkΔτk项与目标方向有关,是DBF的基础;2πfkτ0表示各个通道目标距离所对应的相位,由于各个通道频率不同,所以这部分相位需要补偿。
与多维匹配滤波处理方法相同,在补偿了目标距离所对应的相位后,对感兴趣空间内的方位、俯仰角全部搜索一遍后,即可得到目标的方向图。综合孔径(发射波束形成)和精确测距是同时完成的,不可分开。只有在目标所在的距离和角度上,才能综合出窄脉冲。
3 仿真实验
(1)仿真参数
弹目飞行场景如图4所示。
图4 弹目飞行场景
如图4所示,阵列所有阵元位于xoy平面内,阵列两维参考阵元位于坐标原点。假设导弹和目标为点目标,分别位于远场坐标点(0,105,1.7×105)和(0,1.2×105,1.2×105),并位于zoy平面内。由图4可以看出,导弹和目标与z轴夹角分别为30°和45°。仿真中通道数为10×10,布阵孔径间隔为半个波长。
(2)仿真结果
图5给出了负斜率线性调频信号典型的波形和频谱。基带信号为线性调频信号,中心频率为
0 Hz,带宽为20 k Hz。

图5 基带信号波形和频谱
图6 给出了距离模糊匹配的结果,可以看到目标测量距离为226.55 km,测量时间为755.15 μs。由图可以看出,只有在搜索到目标距离精确值时,才在该波位幅度求和得最大值100(通道数为100),在距离上形成窄脉冲。
由图4可以算得,实际目标位于zoy平面45°位置,即(φ=90°,θ=45°)位置。图7给出了角度测量的结果,即等效于波束形成H面方向图(φ=90°)。
图7表明:只有当搜索到θ=45°时才能得到100个通道信号同向相加,得到幅度最大值100。由此可以测得目标所在角度为θ=45°,同理可测得目标所在位置φ=90°。
由图7也可以看到,横向和纵向的通道数各取10时,波束较宽。在实际中,可以通过增加阵元数目、阵列优化等方式来提高测角精度,通过阵列加权等方法压低旁瓣,这也是未来的工作方向。
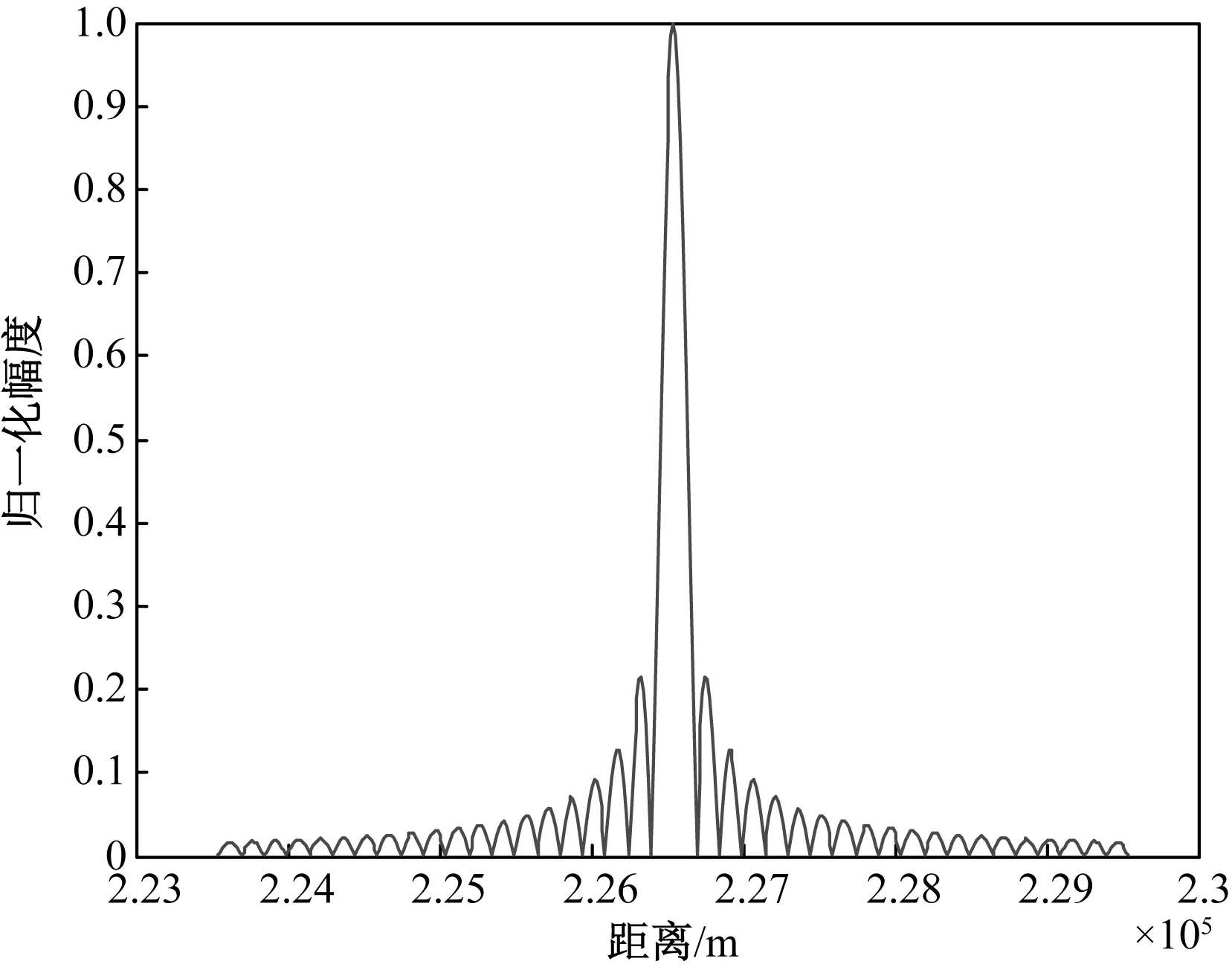
图6 目标所在波位的精测距离
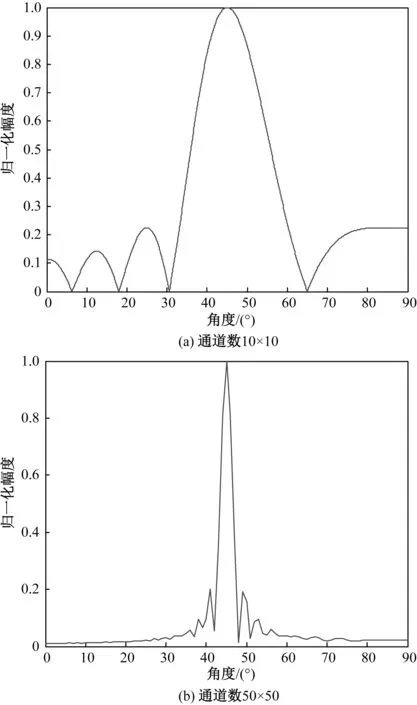
图7 目标测量角度结果
接收端通过弹载的惯导装置获取导弹相对于照射站的位置,通过导弹、目标、地面站的相对位置,即可计算出目标相对于导弹的角度和位置信息,形成制导指令控制导弹攻击目标。
4 结论
本文提出基于SIAR算法的半主动寻的制导系统,对该体制的制导系统进行分析和探索,为反隐身武器系统提供一种简单易行的技术途径。采用该体制制导系统,由于接收天线为全向天线,米波天线可以满足弹载尺寸的要求。本文建立了基于SIAR算法的导引头角度估计系统模型,给出了信号处理流程。详细讨论了米波制导系统如何利用地面大照射阵列实现高精度角度测量。
