最大Lyapunov 指数的车头间距预测方法分析∗
2019-11-12谢生龙刘维娜姚馨雨
谢生龙 刘维娜 姚馨雨
(延安大学数学与计算机科学学院 延安 716000)
1 引言
车辆跟驰行驶是最常见的一种交通行为,而车辆追尾又是这种交通行为下易发的一种交通事故。由于在复杂的道路环境因素刺激下驾驶员会做出不同的行为反应,从而会使跟驰行驶的车辆车头间距随着变化。为了避免跟驰行驶车辆追尾事故的发生,预测跟驰模型车辆间的车头距离有着现实的意义。2017 年郭海锋等以美国I-80 公路实测数据为基础,进行了Gipps,IDM 和Newell三个典型跟驰模型的参数标定,研究结果表明车头间距作为参数标定跟驰模型效果更好[1];2007年李松等通过Matlab 工具进行Bierley 模型交通流时间序列仿真生成,研究了通流混沌转化机理,为交通的混沌控制提供了参考依据[2];2017年Pepe P等研究表明输入-状态的定性的Lyapunov 特性是由离散抽象近似的时间非线性系统的构造问题引起的,从而也说明了不仅理论上的跟驰模型中存在复杂非线性动力学特性,而现实交通流系统中也存在混沌、自组织等复杂行为[3]。不仅如此,现有的交通系统动力学的研究历程也已表明,通过交通流混沌转化机理的分析,车辆跟驰过程中存在制约性、延迟性及传递性等规律和特性[4]。故文章以交通动力学混沌特性为依据,推演跟驰交通流模型中前后车辆的车头间距变化趋势,分析最大Lyapunov 指数的车头间距预测方法,为车辆跟驰模型车辆安全行驶提供理论分析依据。
2 Bierley非线性跟驰模型
现有的GM(Genera Motor)模型是典型的跟驰模型,以刺激反应为基础进而表现驾驶坏境中各种刺激对驾驶员行为的影响,其中,引入反应的概念并结合车辆加速度进行刻画。假设行驶时,当前车辆加速度与此车与跟驰车的车头间距成反比,与两车之间的速度差成正比[5~6],则实际行驶过程中与车辆自身的速度就有一定的直接关系,那么通常可用如下公式表示上述驾驶员的刺激反应过程:

分析时,式(1)中的刺激通过跟驰车辆的相对速度表示;而灵敏度则根据模型的实际需要给予不同的表示。故GM模型一般用公式表示如下所示:

式中:αn+1(t+T)表示(t+T)时刻(n+1)辆车的加速度;Dυ(t)表示t 时刻前后跟驰车辆的速度差;Dχ(t)表示t 时刻相邻跟驰车辆的距离;α0、m、l 、T 均为待定常数。Bierley 在此模型的基础上进一步的改进,得到了如式(3)模型[7]。

3 Bierley 非线性跟驰模型车头间距的可预测性
Lyapunov 指数频谱是系统混乱程度的最直接的体现,最大Lyapunov指数可以作为跟驰模型的交通流是否具有混沌性的一个重要判断指标[9]。通常称为可微映射f 在χ0的最大Lyapunov 指数[10]。下面结合Bierley 非线性跟驰模型进行仿真实验,然后利用仿真数据通过最大Lyapunov 指数计算给出Bierley 非线性跟驰模型车头间距能否预测的递归图判断及预测方法[11]。
3.1 交通流数据仿真生成
假设在研究的时段内,相同的5 辆款式汽车做Bierley 非线性跟驰运动,首车以某一速特定速度υ0(m/s) 行驶,跟驰与被跟驰车头间距为固定值l0。为了真实地反映车辆跟驰行驶的过程中某一时刻t 由于受外界环境的刺激,而引起车辆做出相应的加、减速响应,这里对跟驰行驶过程中的首车加正弦变化进行仿真干扰[12]。具体形式如下:

式(4)中,ω 为角频率,A 表示干扰信号的振幅。仿真中各个信号量取值情况为υ0=15m/s ,l0=30m ,正弦干扰参数分别取值为A=1m/s ,ω=0.05rad/s,再假定非线性跟驰队列中驾驶员具有同等能力的反应参数,不妨取α0=1,Bierley 非线性GM 模型中h=1,κ=0.00001,从而得到模型中头间距随时间变化曲线如图1所示。
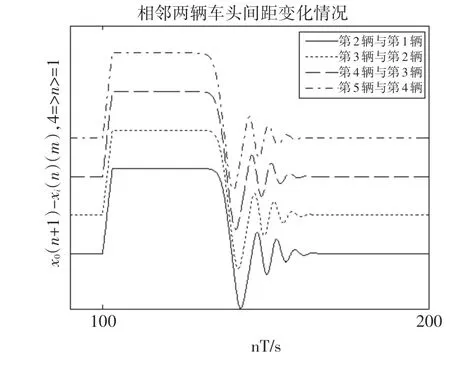
图1 仿真跟驰队列车头间距随时间变化曲线
3.2 可预测性判断
现在通过交通流系统中的混沌特性理论分析Bierley 非线性GM 模型系统中车头间距的可预测性。以车头间距li时间序列为基础,对li作如下处理:

式(5)中,Nm=N-(m-1) ;τ 为滞后时间;m为嵌入维数,通过伪邻域法计算求得30s 序列的最小嵌入位数为8,1min 序列最小嵌入位数为6[13]。这一结果也恰好说明短时交通流的系统行为复杂性,时间越短混沌特征越明显。接下来通过相空间重构产生递归图,在式(5)中取适当小的正数r0求任意点到(Li,Lj)之间的距离。

判断并绘制相邻两辆车T 分别为30s 和1min时的车头间距递归图,结果如图2。

图2 相邻两辆车T分别为30s和1min时的车头间距递归图
从上图中发现若(i,j)为空白点,则该时刻之前 的 若 干 点(i-1,j-1),(i-2,j-2),…,(i-k,j-k)也同为空白点,反之亦然。四幅两两对比的递归图上整体上都有一些由“ ”形成的平行于主对角线的直线段[14]。平行于主对角线的线段长短表示了车头间距可预测性的强弱[15]。直线段的存在说明了根据相思原理可进行预测的科学性,而且两幅图对比发现,1min 序列比30s 序列可预测性更强。
4 基于最大Lyapunov 指数的车头间距预测方法
通过3.1递归图的方法检验系统是否具有混沌性,是否达到混沌状态。若满足多数非主对角线的上的点形成的直线平行于主对角线,则可以通过以下方法求得最大Lyapunov 指数,并进行Bierley 非线性跟驰模型下一时刻车头间距的预测[16],具体的,若设相点

为预测中心点,且Lp的最邻近点为与Lk,Lk∈{X1,X2,…,Xp-1} ,Lp与Lk的距离为d ,则

若给定的是一维动力系统,存在混沌特性,初始距离很小的两个点,随着时间的推移,它们之间的距离成指数增长如式(10)所示。

式中,λ1为最大Lyapunov 指数,另外Lp+1除ln+1外其他分量都是已知,所以ln+1可求解的,其值即为车头间距预测值,通常可预测的最长周期可用来估计。
5 预测算例
算例中首先通过3.1中交通流仿真生成基本的分析数据;其次,用3.2 运动特性识与判断方法(重点为混沌特性)进行可预测性判断;最后,通过判断的结果按照4中叙述的方法进行预测。
5.1 仿真交通流生成
根据2 中Bierley 非线性跟驰模型和3.1 中交通流数据仿真生成思路,设定5 辆同款式车辆进行Bierley 非线性跟驰行驶,这里取h=1,司机未受外界刺激前形式速度υ0=15m/s,初始车头间距假定为l0=30m,为了更真实地体现5 辆车不同驾驶员的差异情况,α,κ 的5组系数取值情况如表1。

表1 仿真中5组系数取值
取采样周期T=1 min ,仿真时长为60min,得到跟驰行驶模型中相邻两车之间车头间距变化情况如图3 所示。从图中显示结果来看,第2、1 辆车头间距近似服从正弦变化趋势,第3、2 辆之间隐约出现高频震荡,第4、3 辆之间车头间距震荡明显,第5、4 辆之间车头间距趋势相对正弦趋势平稳,有着周期性的变化规律。
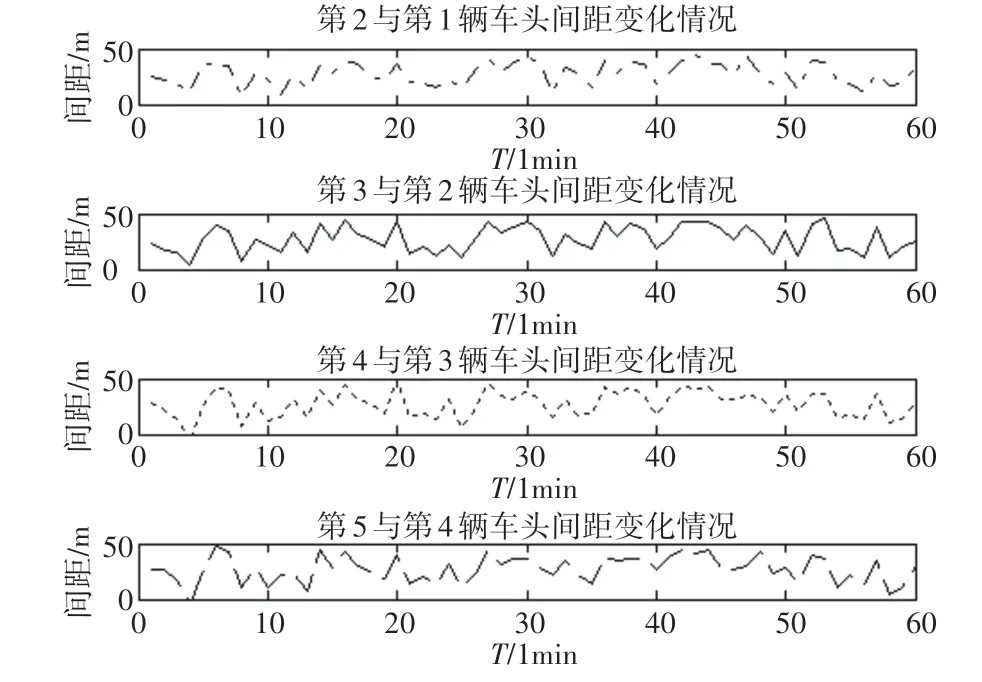
图3 相邻跟驰车辆的车头间距变化情况
5.2 混沌特性识别与判断
为了判断上述仿真交通流是否存在混沌特性,下面使用3.2 中的递归图的方法对第4、3 辆车头间距l34进行判断,为了科学起见,这里仍选取60个采样数据参与有效运算。时间序列t1,t2,…,tj…, j=1,2,…,60,用Matlab作图结果如图4所示。
图4 仿真交通流中第4、3辆车头间距递归图
按照4.1 计算方法发现预测步长1min 时,随着时间序列的生成可求得λ1大于0,且从图4 中看出主对角线两侧“ ”点形成的线整体上平行于其,因而具有混沌特性的仿真数据具备一定步长的短时间可预测性。
5.3 Bierley非线性GM模型车头间距预测
通过引言分析,现以研究模型的混沌特性为基础,基于最大Lyapunov 指数的计算方法进行Bierley 非线性跟驰模型车头间距预测时可按如下步骤完成:
1)这里采用数据移动的方式预测,则某时刻模型中车头间距序列li在相空间中的点Li=(li,li+τ,…,li+(m-1)τ)以P(平均周期)≤iα ≤S(数据个数)的最近点为Li=(liα,liα+τ,…,liα+(m-1)τ)[17]。
2)用任意一种方法计算最大Lyapunov 指数λ1。
3)根据式(10)求出预测值ln+1,也可进一步表示为[18]

于是liα+(m-1)τ+1的预测值为
通过算例测试,可能是仿真采样数据偏少、不客观或参数未修正等原因造成的预测误差有些偏大,但在一定程度上可以接收,具体对比结果如图5所示。
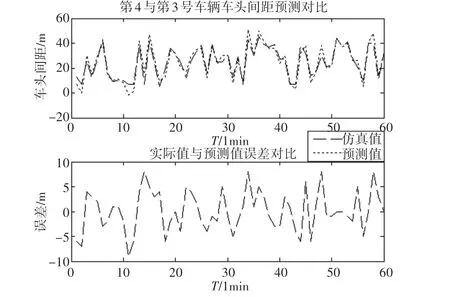
图5 第3、4辆车车头间距预测对比
6 结语
文章首先从交通流系统混沌、非线等基本特性出发介绍了Bierley非线性跟驰模型,又阐述了通过计算最大Lyapunov 指数判定Bierley 非线性跟驰模型车头间距是否具有可预测性的基本方法,与文献[2]相比,用该方法判断车头间距随时间生成的序列是否有混沌特更具有操作性和可视性。其次,实验以仿真交通流为算例基础,对比了5 辆皮莱特非线性GM 模型中相邻两辆车在T 分别为1min 与30s时的车头间距的可预测情况,对比发现其他条件一定的情况下步长较大的相空间重构车头间距递归图体现出了较好的预测性。再次,给出了最大指数计算由式(11)的Bierley 非线性跟驰模型车头间距预测方法。最后,根据仿真数据预测了第4、3 辆车两车头间距,发现预测值误差有些偏大,这可能是仿真采样数据偏少、不客观等原因造成的,还需进一步探究,但整个预测方法的分析过程可以为车辆跟驰行驶模型安全预警提供理论借鉴。