基于ADAMS的卫星对接机构球锁装置动力学分析
2019-11-08王昊东武国梁
王昊东,杨 臻,武国梁
(1.中北大学 机电工程学院,太原 030051;2.西南自动化研究所,四川 绵阳 621000)
空间对接技术是发展空间对抗装备的重要手段,是各航天大国争相发展的核心技术[1],是实现航天器在轨装配、回收、补给、维修、以及航天员交换等在轨服务的先决条件[2-3]。空间对接机构作为实现两航天器在轨对接的核心部件,对两航天器的对接、锁紧、分离成功起着至关重要的作用[4]。
随着模块化航天器[5-6]设计概念被提出,以及电子、控制技术的不断进步,小型航天器在轨重组对接技术以其功能可拓展、发射成本低、使用寿命久的优点成为空间技术发展的主流[7-8]。传统空间对接机构如锥杆式、类锥杆式[9]和异体同构周边式等对接机构结构过于庞大,且利用推力器实施惯性对接的方式无法适用于小型卫星的在轨对接。2011年英国萨里大学提出由电磁力提供对接力/分离力,用于小型模块卫星在轨组装的AAReST的项目[10]。其对接机构因小型化设计而采用反对称原则[11],由对接系统的主动机构(锥头)和被动机构(锥口)联合完成对接。目前该项目处于地面实验阶段,而我国对于小型卫星对接机构的研究尚处于理论阶段。在各国空间技术对抗的背景下,国内开展小型卫星对接机构的研究刻不容缓。
总结萨里大学电磁对接机构:该机构无结构锁设计,在自锁时需时刻通电保持电磁引力。现以电磁力为对接力的前提下,设计一种小型卫星对接机构,采用球锁装置机械锁紧形成刚性连接,锁紧后可断电减少能源消耗。利用虚拟样机技术针对电磁对接机构进行结构设计和仿真分析,从而为电磁对接机构原理样机的建立提供参考。
1 机构的组成
对接机构总体结构的UG模型如图1所示。

1主动电磁铁;2对接引导锥;3主动机构对接齿;4主动机构球锁孔;5引导锥口;6被动机构对接齿;7转动锁紧圈;8捕获锁弹簧顶销;9齿轮;10锁紧球;11被动电磁铁
图1 对接机构总体结构UG模型
2 工作原理
2.1 电磁力与接近过程
环形电磁线圈是电磁对接系统的基本组成部件,目前提出的空间电磁对接系统主要利用一组环形电磁线圈组成的电磁铁在空间相互作用产生电磁力和力矩,实现两星的对接。下面通过电磁场仿真软件Ansoft Maxwell在麦克斯韦方程基础上进行电磁铁的电磁场仿真,电磁铁的具体参数值见表1,电磁场仿真模型如图2所示。
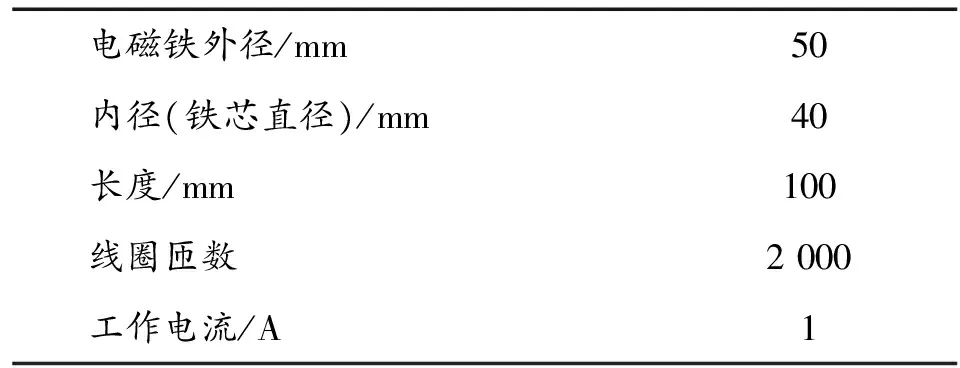
表1 电磁铁参数值
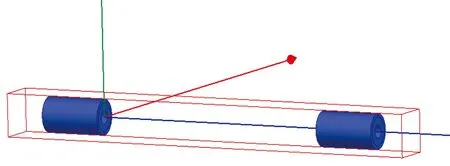
图2 电磁场仿真模型
以卫星质量100 kg进行仿真,得出一对电磁铁在不同距离时,相互之间产生的电磁引力。如图3所示,两电磁铁距离越小,电磁引力增加程度越大。

图3 不同距离时的电磁引力
主、被动机构的对接过程靠近阶段:以对接距离0.5 m的一维对接(或对接轴角度小于15°)为例,表2的数据为根据电磁引力仿真结果,每100 mm距离取点选取数据,考虑精度要求得出瞬时电磁力。将表2 中的数据代入牛顿第二定律计算得出对接速度曲线如图4。0~133.8 s电磁铁全功率工作,主、被动机构在电磁引力作用下加速靠近,加速时间133.8 s,对接速度达到0.033 m/s;133.8~135.5 s期间,电磁铁减小电流,使电磁引力维持1 N,机构匀加速靠近,135.5 s时速度增至0.05 m/s;135.5~135.8 s期间关闭电磁铁,主、被动机构匀速靠近至接触,135.8 s时两机构接触瞬时速度小于0.1 m/s;预计靠近阶段总耗时不少于136 s。
2.2 锁紧机构
对接机构依靠电磁力的引力作用靠近、接触,使用球锁装置进行捕获、锁紧、解锁,最后在电磁铁斥力作用下分离。对接过程的工作流程框图如图5所示。
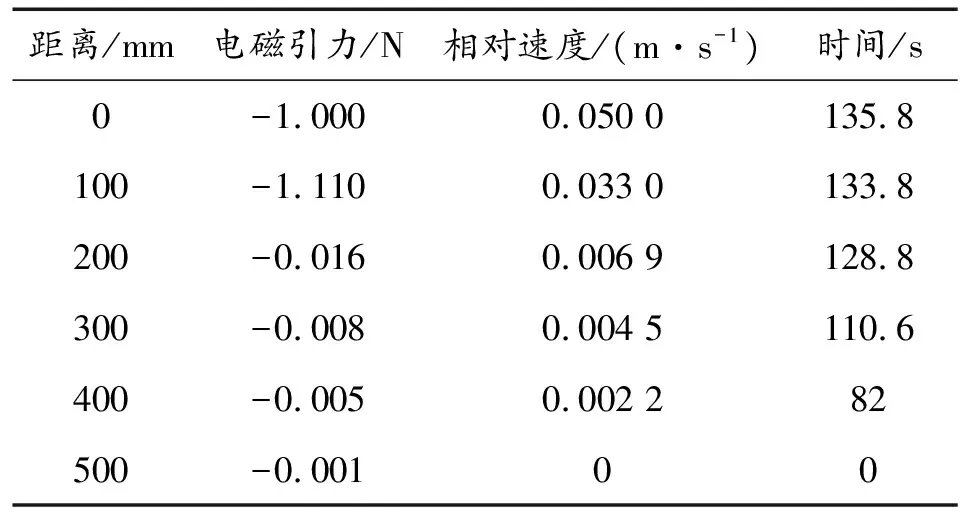
表2 不同距离的电磁引力、相对速度大小

图4 不同距离对接速度曲线

图5 对接过程工作流程框图
其中锁紧机构工作过程分为初对准、捕获锁捕获主动机构、电机驱动锁紧圈转动完成锁紧、电机驱动锁紧圈转动解锁4个过程:
1) 主动卫星与被动卫星在0.5~1 m距离时启动电磁铁,在相互之间的电磁引力作用下靠近,期间通过对电磁力大小、方向的控制完成慢速接近,使两卫星接触时无冲击;接触后,在对接引导锥、锥口的引导下完成轴向上的初对准;
2) 捕获主动机构示意图如图6。当主动机构插入被动机构时,主动机构对接齿与被动机构对接齿形成精对准啮合,同时捕获锁弹簧顶销将锁紧球压入主动机构球锁孔完成捕获锁对主动机构的捕获;
3) 锁紧状态示意图如图7。齿轮在电机驱动下带动锁紧圈转动至锁紧位,锁紧圈内壁将锁紧球与锁孔之间压紧,完成对接机构的刚性连接。此时主动、被动电磁铁可断电,连接的卫星开始执行在轨任务。
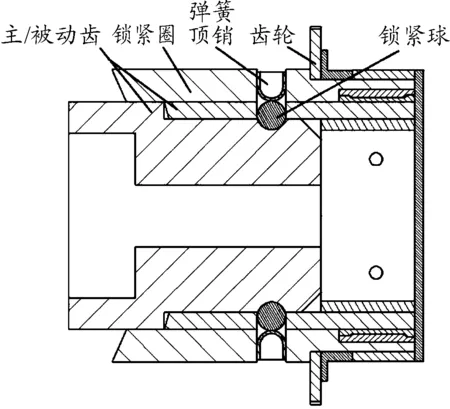
图6 捕获主动机构示意图
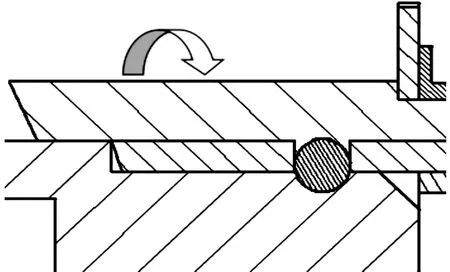
图7 锁紧状态示意图
4) 完成在轨任务(维修、补给、组装等任务)后,连接的两卫星进行释放分离:电机继续驱动,带动锁紧圈转至解锁位,锁紧圈内壁(如图8所示)的锁紧球释放槽释放锁压紧的锁紧球,使对接机构处于解锁状态(示意图如图9)。
解锁后,主动、被动电磁铁通电形成相互之间的斥力,利用斥力完成分离。分离后,电机可继续驱动锁紧圈转动至弹簧顶销位置,为下一次对接作好捕获锁准备。

图8 锁紧圈内壁
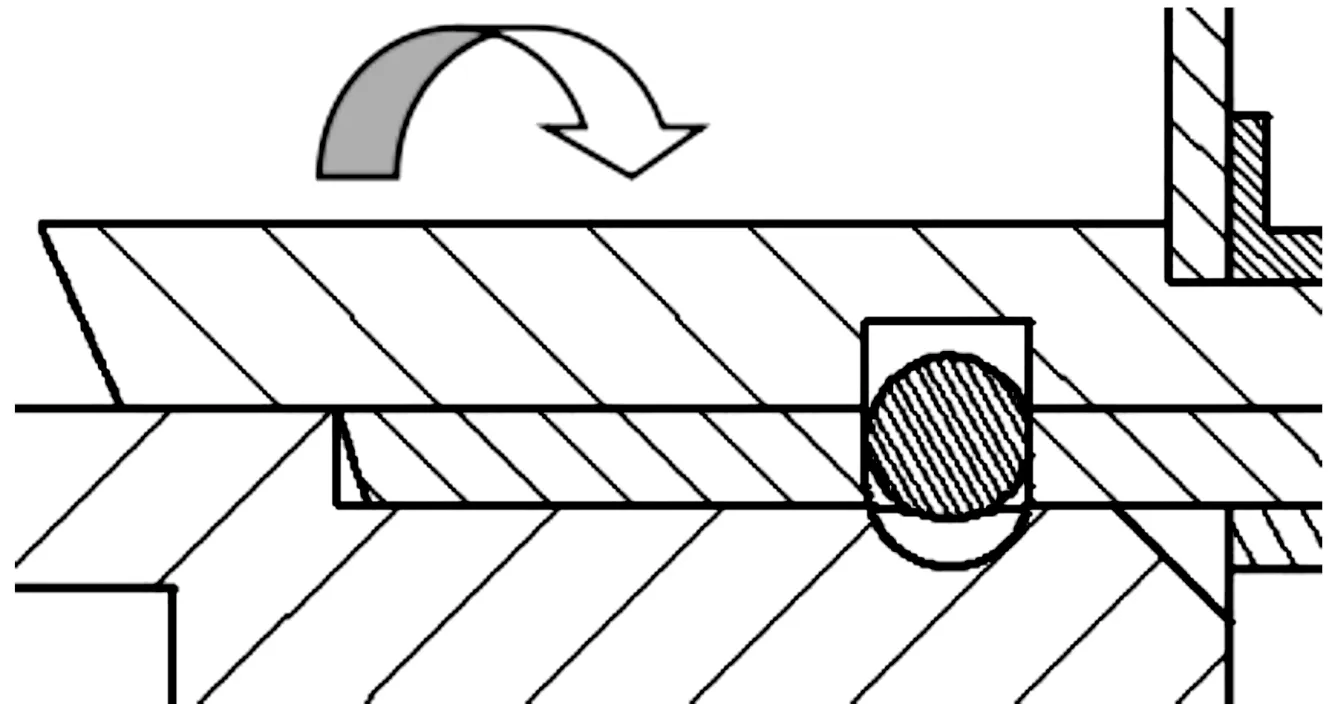
图9 解锁状态示意图
3 对接机构球锁装置动力学分析
通过建模软件UG对整个对接机构进行三维建模,模型参数值如表3。将模型导入ADAMS,按照实际情况对零部件进行材料、约束、接触力的添加,并设置变量参数,然后进行动力学仿真。
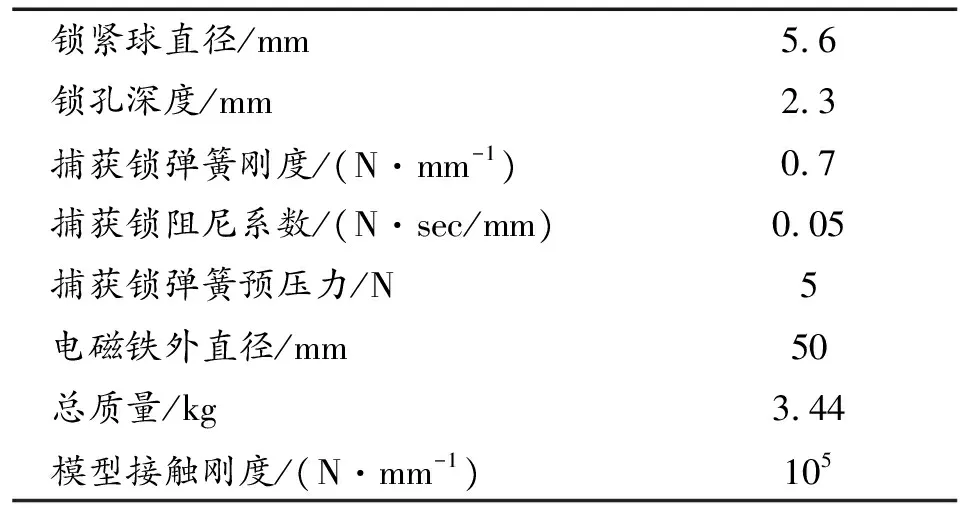
表3 模型参数值
对接机构的运动和受力较为复杂,对模型进行适当简化和假设能将复杂问题有效地简单化,有利于运动的分析[12]:
1) ADAMS动力学模型按照实际的运动规律添加约束,其模型不考虑各种误差[13];
2) 将所有零部件视为刚体[14];
3) 重力加速度为零;
4) 不参与运动过程碰撞的零部件进行布尔加和操作,作为一个零部件处理[15]。
仿真主要针对锁紧与释放2个功能进行。主动机构沿Z轴运动,首先验证机构是否能顺利完成对接功能;其次验证主被动机构之间完成锁紧后,在主动机构受200 N轴向反向外力下,分析结构是否可靠,能否完成自锁;以及分析对接过程中锁紧球与主动机构锁孔的接触力、锁紧球与锁紧圈接触力。
设置对接力大小,锁紧圈转动角度并运行软件:
1) 主动机构对接力大小时间函数:step(time,0.28,0,0.281,30)+step(time,0.3,0,0.35,70)+step(time,0.39,0,0.4,-100)+step(time,1.6,0,1.7,-200)+step(time,2.7,0,2.8,200)+step(time,4,0,4.1,-80);
2) 锁紧圈转动角度时间函数:step(time,0.5,0 d,1.5,45 d)+step(time,2.9,0 d,3.9,45 d);“d”为角度(°)。
设置动力学仿真时长4.13 s;被动机构与空间设置固定副,主动机构设移动副模拟对接过程中快速接近段、慢速接近段;以对接力控制主、被动机构接触后的对接/分离过程,得出仿真结果曲线如图10~图14。
图10中实线为主动机构轴向位置变化曲线,虚线为主动机构速度变化曲线;图11实线为锁紧圈以机构轴向为轴的转动角速度,角速度曲线对时间求积分得出角度变化曲线,即虚线;结合图10图11分析:图10中,0~0.1 s主动机构快速靠近速度为1 m/s;0.1~0.26 s期间以0.1 m/s的速度慢速靠近;0.26~0.36 s期间接触碰撞,主动机构速度因机械振动产生波动,主动机构总行程130.25 mm;图11中,0.36~4 s期间主、被动机构接触,位移、速度基本保持不变,其中0.5~1.5 s锁紧圈由0°转动至45°锁紧状态,1.5~2.9 s保持锁紧状态不变,2.9~3.9 s锁紧圈由45°转动至90°解锁状态(图11),因进行锁紧/释放动作,机械振动效果在主动机构速度曲线中反映出来(图10);4~4.1 s,锁紧装置解锁,释放主动机构加速分离。

图10 主动机构的轴向位移、速度曲线

图11 锁紧圈的转动角速度、转动角度曲线

图12 主动机构对接/分离力曲线
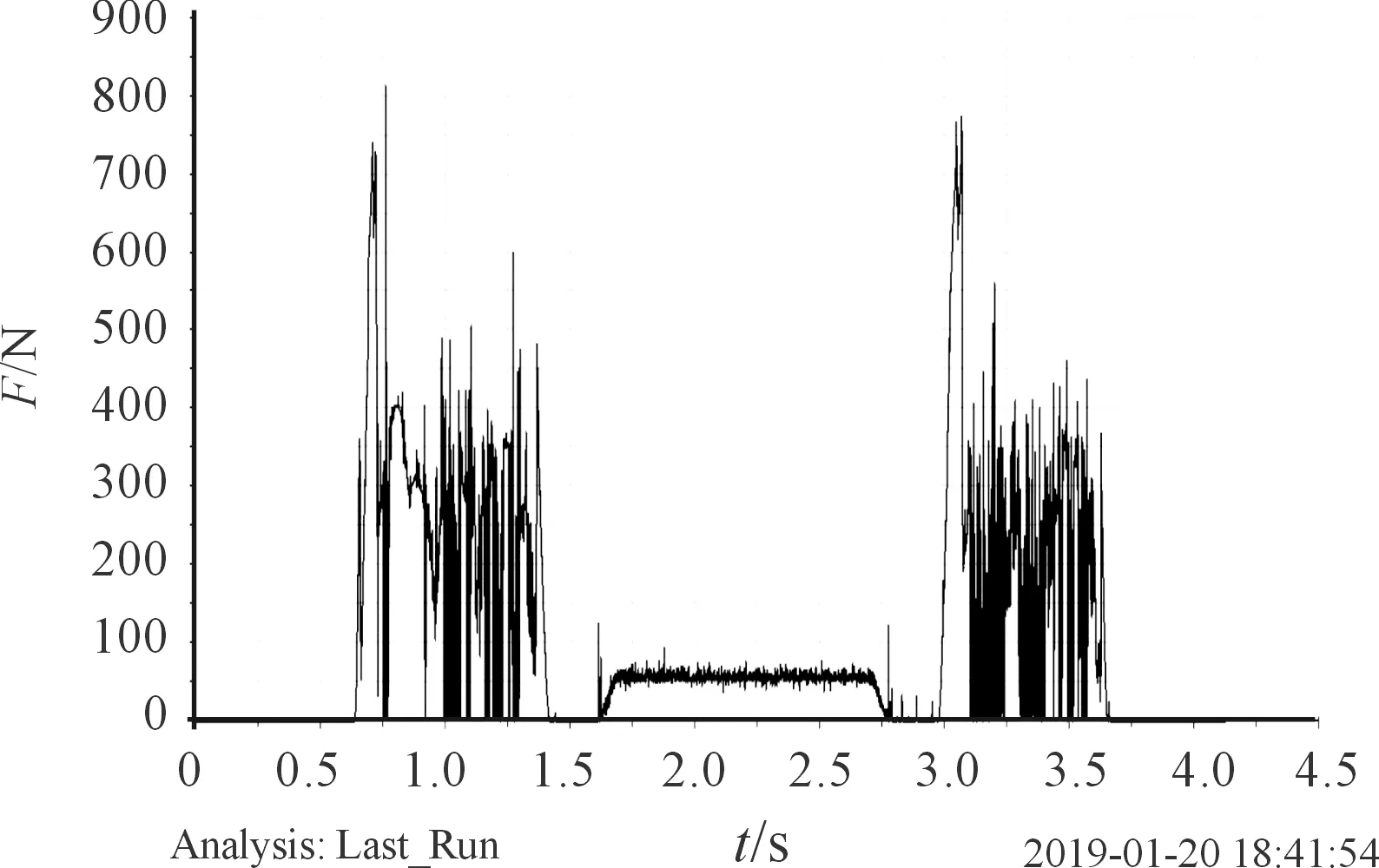
图13 锁紧圈与1号锁紧球接触力曲线

图14 锁孔与1号锁紧球接触力曲线
图12所示为提前设置的主动机构对接/分离力数值曲线,0.26~0.4 s对接力为100 N;主、被动机构接触后0.5~1.6 s期间和2.6~4 s期间无力作用;1.6~2.6 s期间添加200 N轴向反力,以验证锁紧机构可靠性;4~4.1s分离力增加至70N。图13所示曲线为主、被动机构接触并完成一系列动作后,锁紧圈与一号锁紧球与之间的接触力数值曲线;图14所示为主动机构锁孔与一号锁紧球之间的接触力数值曲线;
结合图12图13图14分析:0~0.5 s锁紧球与锁紧圈不接触,锁紧球在弹簧顶销的作用下与主动机构接触碰撞,接触力为16.3N;0.5~1.5 s锁紧圈转动并与锁紧球接触,接触力平均值为247.2 N,最高达到810.4 N,锁紧球与锁孔接触力平均值为62.1 N,最高达到346.2 N;1.5~2.8 s主、被动机构受200 N轴向反力,锁紧球与锁紧圈接触力平均值为55.8 N,锁紧球与锁孔接触力平均值为73.2 N;2.8~3.8 s,锁紧圈与锁紧球接触力平均值为139.4 N,最高达到772.6 N,锁紧球与锁孔接触力平均值为62.4 N,最高达到250.2 N;3.8~4.13 s两机构解锁至分离,锁紧球不与锁紧圈和锁孔接触,接触力均为0 N。
通过结果分析出:主、被动机构以0.1 m/s的对接速度接触后,能在0.9~1.1 s内顺利完成锁紧或解锁;因锁紧圈与锁紧球之间存在有间隙和无间隙的切换,所以在锁紧圈转动时,与锁紧球间存在碰撞产生较大瞬时接触力,应增加锁紧圈内壁与锁紧球的接触面积,并增加锁紧圈内壁硬度,或适当减慢锁紧圈的转动速度,使碰撞减弱;在锁紧状态下,机构受200N轴向反力时,锁紧球与锁紧圈和锁孔之间的接触力在55~74 N之间,属于正常值,说明锁紧装置在受200 N拉力下,可保持正常的锁紧状态。
3.3 锁紧球
通过锁紧圈压紧被动机构和主动机构锁孔之间的锁紧球,受到的剪切力和锁紧球的强度决定了锁紧可靠性。
面积:
锁紧球的直径为5.6 mm,锁紧状态下锁紧球截面面积远大于Smin,即锁紧球强度满足要求。
4 结论
设计了适用于小型卫星的电磁对接机构的球锁式锁紧装置:
1) 对接机构在0.5 m距离内可利用电磁铁引力进行靠近、对接;
2) 球锁装置能顺利完成锁紧与解锁动作;
3) 仿真结果为建立原理样机及电磁控制策略制定提供参考。