基于UG/WAVE无人战车的新设计方法
2019-11-08高新安管小荣牟奥敏
高新安,管小荣,司 访,牟奥敏
(南京理工大学 机械工程学院,南京 210094; 2.中国兵器工业第二〇八所, 北京 102202)
在无人战车的传统设计方法中,通常先对各零部件进行详细设计,然后在组件模式下进行约束装配,因而在装配过程中存在许多父子关系。当修改某些零部件后,会发现以这些零件的点、线、面为基准的其他装备零件因为缺失装配基准而无法装配,需要进行反复的修改,重复工作量大,延长了设计更新所需的时间,降低了设计效率,在人力和时间上造成不必要的浪费[1-2]。无人战车各个部件、零件之间存在紧密的关联关系,在设计过程中,这些关系相互传递,采用自顶向下的设计方法,可以优化设计方案,提升设计的水平,满足无人战车的研制需求。
本文基于UG/WAVE,对无人战车自顶向下设计方法进行了研究。在无人战车总体控制结构的基础上建立了无人战车自顶向下设计模型,实现了设计人员之间的协同和并行设计,提高了无人战车的研发效率。
1 无人战车结构分析
无人战车是集机械化、电子化和信息化于一体的智能武器作战平台[3]。无人战车从结构上可分为上装作战载荷部分和下装车体两部分。上装作战载荷部分机枪布置于枪塔子系统回转中心;观瞄子系统布置于机枪右侧,与机枪摇架固连;机枪弹箱布置在托架左侧。枪塔部分除了作为武器回转、高低俯仰的支撑,也是各类传感器、执行电机等的安装平台。图1为无人战车作战载荷分系统拓扑结构。
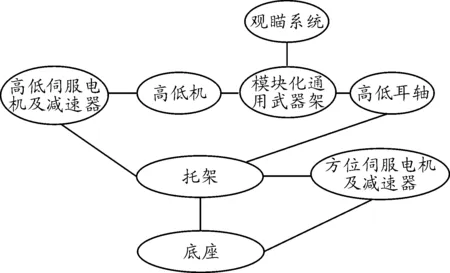
图1 作战载荷分系统拓扑结构
下装车体部分包括显控终端、火控箱、底架、顶盖装置以及车轮等,显控终端、火控箱等可根据车内空间进行组合或分解,安装于适当位置。
2 基于UG/WAVE的自顶向下技术建模方法
无人战车采用这种设计方法时,在设计初始阶段,将无人战车作为一个整体,考虑无人战车的功能、结构、部件装配等特点,对部件进行分解,在无人战车的顶层进行总体设计,事先规划无人战车框架并考虑装配和定位信息,应用UG/ WAVE技术生成总体控制模型,完成概念设计后再对零部件的结构进行详细设计,从而实现无人战车的自顶向下的零部件结构设计。
自顶向下装配设计有2种方法:
1) 首先在装配中创建一个没有任何几何对象的新组件,接着将新组件设为工作部件,最后在新创建的组件中建立几何模型。
2) 首先在装配中创建几何模型,然后建立新组件,最后将几何模型添加到新创建的组件中。
运用UG/WAVE技术对无人战车进行自顶向下设计有以下两个主要优点:
1) 当无人战车设计要求改变时,只需要修改顶层的设计数据,因为其他零部件都与此设计数据保持关联,所以它们也将自动跟着修改,无需对零部件进行一一的修改,这样就可以实现无人战车的自动同步更新。
2) 在无人战车设计的概念设计阶段,就明确无人战车的设计要求、主要性能指标、装配关系等主要信息,这些信息在任务分配的同时也分配给各设计人员,便于实现各设计人员之间的协同和并行设计。
3 无人战车自顶向下设计过程
3.1 模块划分
在无人战车结构化设计中,根据设计需求,采用自顶向下,逐步分解的方法,将无人战车系统分解为一些相对简单、功能单一的模块,包括枪,弹药箱,底座,车体,电机,瞄准系统,枪身托板等一级模块。其划分过程框图如图2所示。
将干馏污水处理后回用于油页岩干馏生产,不仅实现了污水的零排放,每年节约水资源300余万t,而且还可以回收干馏污水余热供暖约11万m2,每年可节约标煤3 019 t。
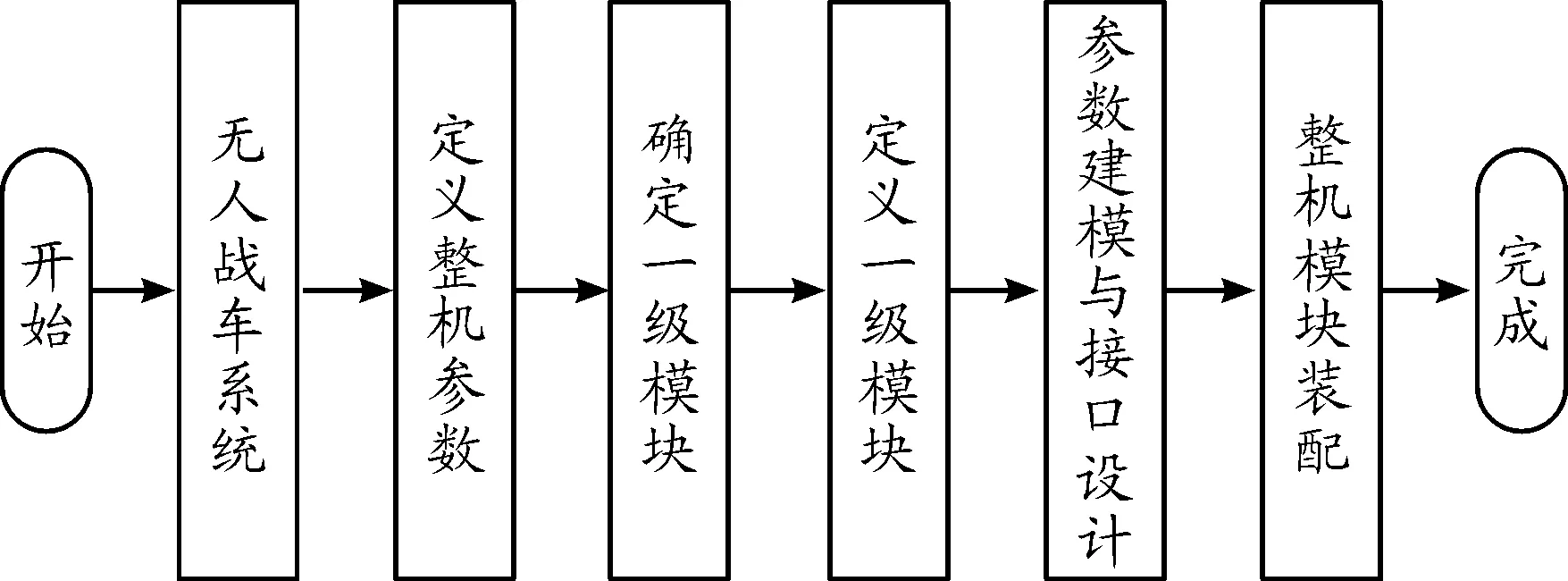
图2 无人战车模块划分过程框图
3.2 总体控制参数
根据无人战车总体研制需求,确定无人战车的总体设计参数。有关参数符号参见图3和图4之无人战车示意图。无人战车总体设计参数作为各个子系统关联设计的设计目标及约束条件,应包括表1的内容。
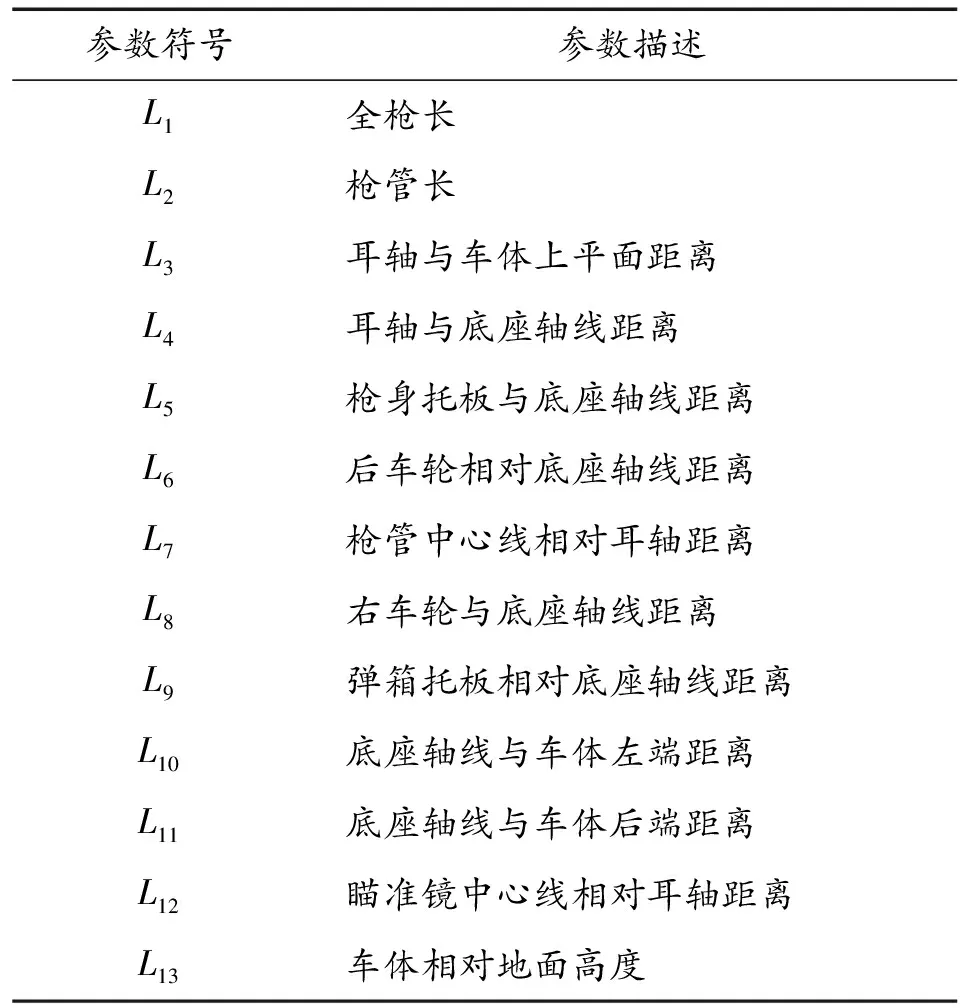
表1 总体控制参数
3.3 总体控制结构模型
总体控制结构是一个介绍产品空间布局和组件设计标准的总装配体,它包含着产品装配的空间规划及安装位置等信息[7]。通过一些简单的几何体来描述总体设计要求和关键零部件位置,为接下来的设计提供约束框架,解决无人战车的设计问题。
图3 无人战车示意图侧向

图4 无人战车示意图主视方向
因此通过总体控制参数建立无人战车设计中的主要基准框架,建立基准平面和基准线并建立草图轮廓线。
基准线:耳轴轴线、底座轴线(回转轴线)。
草图轮廓线:无人战车各个零部件大致的外形轮廓草图。
基准平面:3个绝对基准面XOY、XOZ、YOZ以及由控制参数形成的基准平面,如表2。
由此确定的总基准可建立起无人战车的总体基准框架,如图5所示。
表2 总体基准平面
3.4 总体控制结构树
控制结构在树状结构的底层包含产品的控制、性能、布置等内容,根据这些内容可以将产品划分为相互关联的不同子系统,设计人员只需在每个子系统内进行相应的工作[8]。因此,创建整个无人战车的装配体;在总体装配体下建立无人战车的各个部件,利用WAVE技术,在各个部件中分别复制无人战车总体控制结构中相应的约束信息;接着为各个部件建立对应的起始部件,在起始部件中复制相对应部件的约束信息;最终将无人战车总体控制结构作为根节点,各个部件及相应的起始部件为分支,建立无人战车总体控制结构树。图6所示为只包含前轮轴、左前轮和右前轮的无人战车总体控制结构树示例。
图5 无人战车总体基准框架

图6 总体控制结构树示例框图
3.5 装配结构树
新建无人战车总成装配体,在无人战车总成装配体下建立无人战车的子装配体。无人战车连接部件都由相应的起始部件进行详细设计,为起始部件创建其连接部件,将起始部件中的约束信息复制到连接部件中,形成装配结构树[9]。图7所示无人战车装配结构树图例为只包含车轮和装饰罩。
图7 装配结构树示例框图
3.6 模型详细设计
在无人战车装配结构导航器中依次将所需要进行详细设计的零部件设置为显示部件,按照已设定好的约束条件,通过草图和特征操作等方法来实现零部件结构的详细设计。枪管部件装配模型图如图8,瞄准镜部件、弹箱部件以及车体部件装配模型如图9。枪管部件、瞄准镜部件、弹箱以及车体部件的最终装配模型的主要参数如表3。

图8 枪管部件装配模型

图9 瞄准镜部件、弹箱部件以及车体部件装配模型

参数名称数据/mm参数名称数据/mm枪管长度943枪管参热套长度232弹箱宽度155枪管散热口直径33弹箱长度262枪管散热套厚度5弹箱高度152主车体长1 533枪管口径14.5主车体宽330枪管外径36主车体高697
3.7 参数化实体模型建立
完成无人战车各部件和子部件参数化实体模型建立,利用UG/WAVE的装配技术进行无人战车总体参数化装配[10],在装配时由于装配导航器中的各部件拥有相同的参考系,可使用绝对原点进行装配,摒除了传统设计装配时零件间的装配约束,装配完成的无人战车参数化实体模型如图10所示。
4 结论
针对无人战车规范及产品功能、结构、部件装配特点,基于UG/WAVE技术,采用自顶向下的设计方法,建立了无人战车参数化模型;这种设计方法不仅支持设计人员之间的并行设计和相关设计,在设计阶段避免重复性工作,降低设计工作量,提高设计效率。
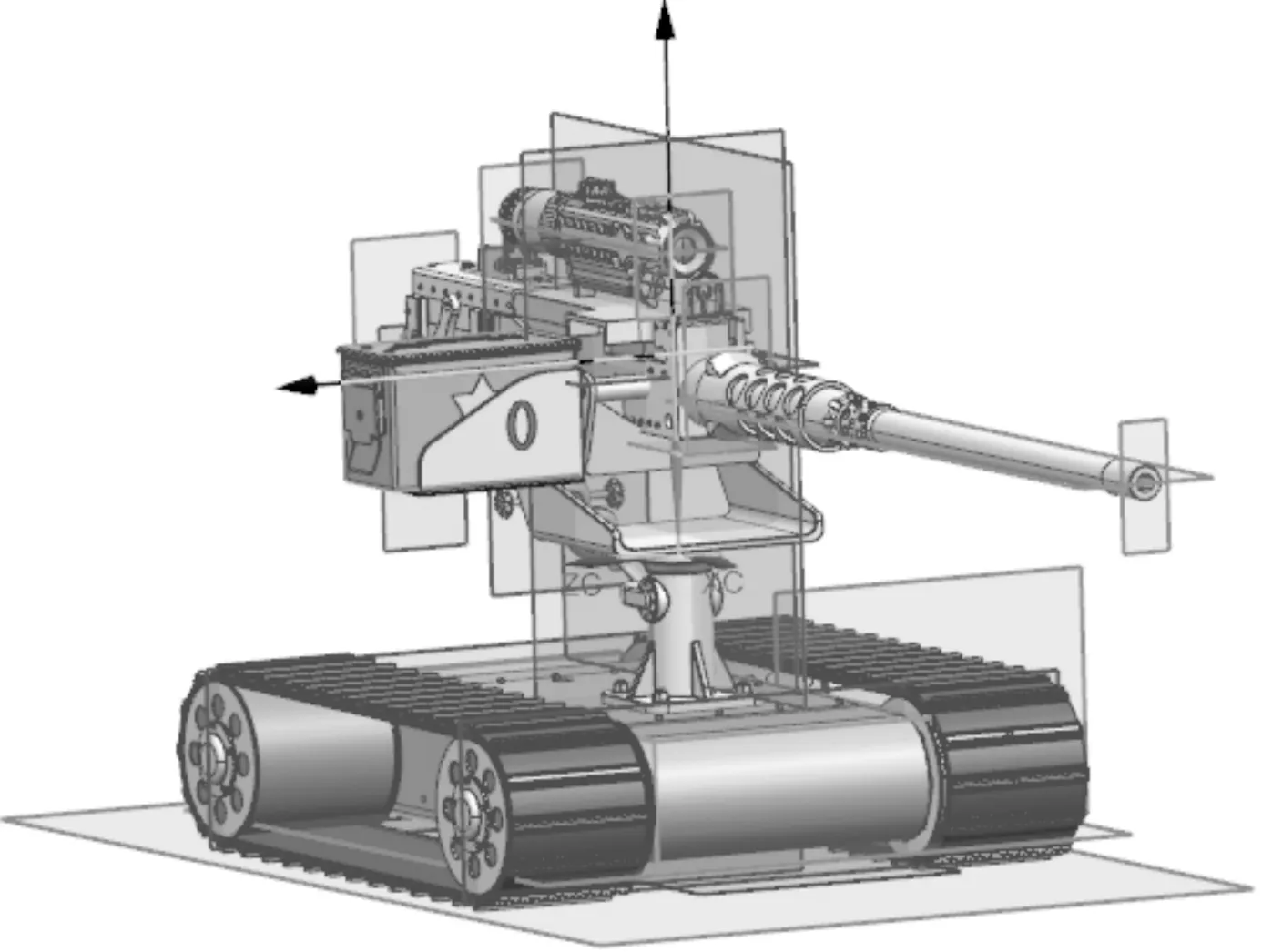
图10 无人战车参数化实体模型