基于多传感器交叉提示的临空高速目标探测体系
2019-11-07谢家豪韦道知
谢家豪,韦道知
(空军工程大学防空反导学院,陕西 西安 710051)
0 引言
临近空间[1-3]是指海平面之上约20~100 km的介于最高和最低飞行区域之间的空域,临近空间高速目标[4-6]主要是指在可以在临近空间中完成一系列战术任务的飞行器,这类武器的高机动性和高精确度等性能对如何利用现有传感器进行组网探测现有的预警探测体系提出了更大的挑战和更高的要求。
目前国内外对应用多传感器组网[7-9]建设协同预警探测体系的研究较为深入,多传感器组网探测主要目的就是对目标的探测任务通过协作的方式完成,将多个传感器对一个目标同时进行量测,经信息融合,得到关于目标更为准确的信息,将此信息提供给武器系统,作为作战的依据。文献[10]提出了基于Holon系统的协同作战网络传感器管理架构同时指出该框架具有自治性和协作性等特点。文献[11] 体现出目前仅靠单一传感器不能完成复杂的对目标探测的任务的情况并将问题拓展到了多传感器多目标领域,运用有限集统计理论的模型并通过优化目标函数使总体的不确定性降到最小,提高探测精度。本研究在多传感器组网的前提下提出多传感器交叉提示技术,该技术最早由Philip David[12]针对传感器资源管理提出的一种新技术、新方法,指传感器之间互相提示,通过一个传感器探测到的目标信息提示另一个传感器协同获取目标更加详细以及额外的信息,或来填补其他传感器的覆盖空隙进行目标的交接,以达到统一协调传感器的行为。近年来樊浩[13-14]、庞策[15-16]等人对多传感器交叉提示技术进行深入研究,提出多传感器动态联盟的思想,同时将博弈论算法引入到多传感器交叉提示技术中,取得较好的效果。但是上述方法也没有解决单一平台探测无法实现对目标的连续高概率探测问题。本文针对此问题,提出了基于多传感器交叉提示的临空高速目标探测体系。
1 临空高速目标探测技术需求分析
临空高速目标的飞行马赫数一般大于5,以吸气式发动机或组合发动机为主要动力应用形式包括高超声速巡航导弹、高超声速有人或无人机、空天飞机和空天导弹等多种飞行器。表1给出了以X-51A、HTV-2和AHW为代表的典型临近空间高速目标的参考参数。由表1参数可知,临空高速目标的飞行速度、更高的突防能力、更大的破坏力等目标特性在作战使用中,能迅速到达任意位置并实现对目标的快速精准打击。

表1 典型临近空间高速目标的参考目标特性
由于临空高速目标具有飞行速度快,机动性强,破坏力大等特点,那么就要求预警探测系统的探测距离要大于1 000 km才能赢得作战时间从而解决对目标的连续高概率探测与稳定跟踪。目前预警探测传感器类型主要有雷达、预警机、浮空器和天基预警系统,具体类型如表2所示。

表2 预警探测传感器类型
根据表2数据简要分析各种类型传感器的特点。
预警雷达[17]容易应急部署,驻留时间长,工作稳定性好,探测精度高。但受地球曲率、阵面尺寸等情况影响,探测距离和探测精度有限,生存能力弱,机动性差。预警飞机使用机载雷达对指定空域进行搜索、监视,能对关注区域应急部署,灵活性好,速度和高度适中,生存能力弱,速度和高度适中,生存能力弱。浮空器可对临近空间目标进行远距离的探测,容易应急部署,但其缺点在于机动能力差,上升和准备时间较长,能源供应困难。
天基预警利用天基系统发现、识别及定位临近空间目标,主要分为高轨卫星和中低轨卫星,其中天基红外高轨系统由4颗高轨卫星(GEO)和2颗大椭圆轨道(HEO)卫星构成,主要用于探测跟踪弹道导弹助推段飞行。
表3给出天基红外预警卫星对X-51A的探测跟踪能力。

表3 天基红外预警卫星对X-51A的探测跟踪能力
从表3中可以看出天基预警监视范围广,速度快,高度高,覆盖范围大,工作稳定性和生存能力好,能早期探测并预警,但驻留时间短,机动性差,在跟踪能力上较弱。
2 基于多传感器交叉提示技术的临空高速目标协同探测体系
2.1 多传感器交叉提示技术基本概念
不同类型的传感器部署位置不同,通过组网方式实现对目标协同探测,不同种类、不同个体传感器之间取长补短,优势互补,达到单个传感器难以达到的探测效果,大大提高传感器性能。鉴于此,多传感器交叉提示技术应运而生。
多传感器交叉提示的实质是传感器之间的协作、协商和协调。
“协作”指当单个传感器由于探测能力限制而不能单独完成某项复杂的探测任务时,由多个传感器以协作的方式协同完成该项任务,在协作过程中,多个传感器之间共同承担作战任务,并资源共享。
“协商”是指多个传感器就目标特征和传感器特性等相互交流,以此确定最佳的协作方案。
“协调”是指随着作战态势的变化,当传感器之间的协作方案不再适用时,通过对传感器资源调整,使协作方案重新适应新的作战态势。
2.2 多传感器交叉提示技术分析
2.2.1多传感器交叉提示发生条件
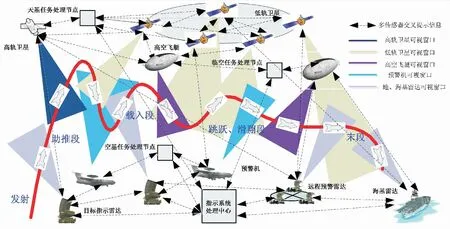
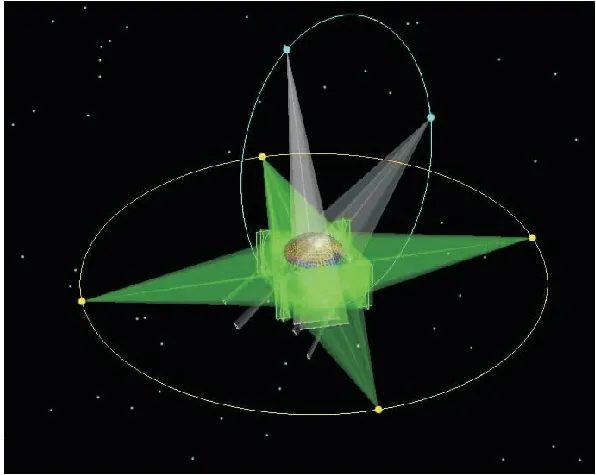
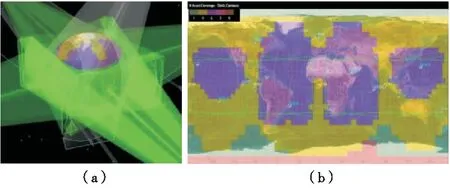
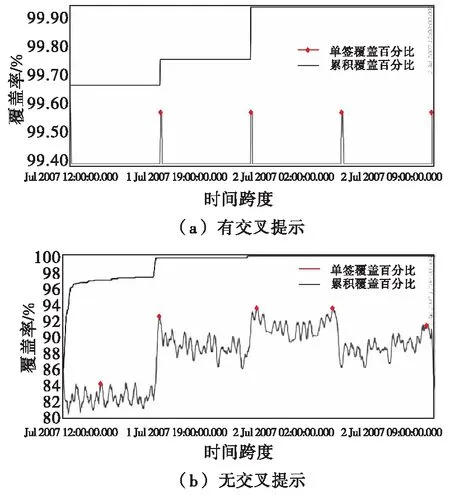
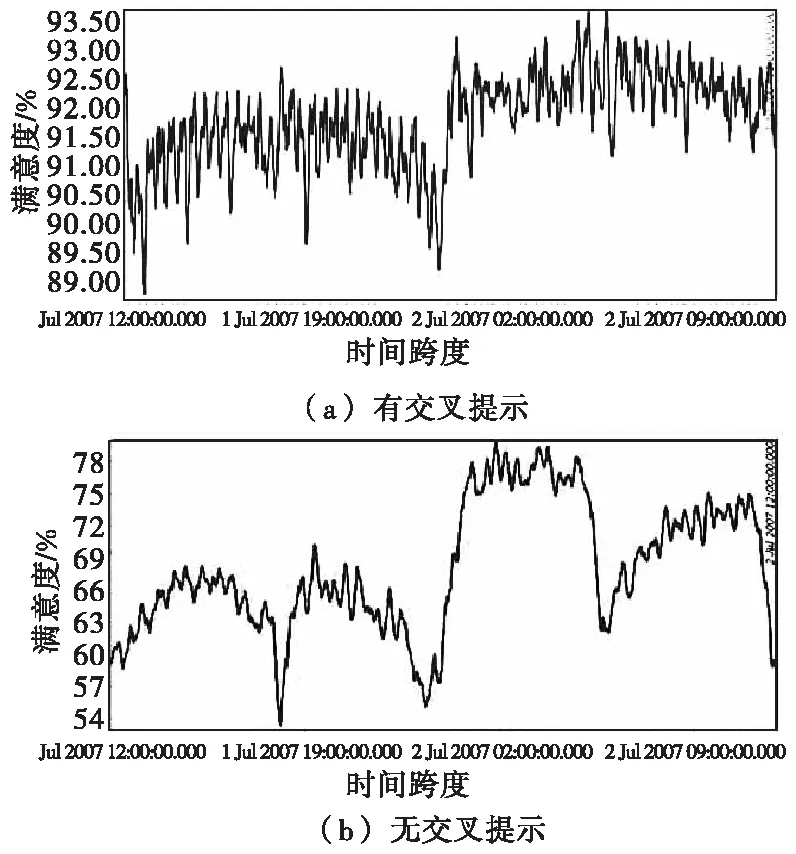
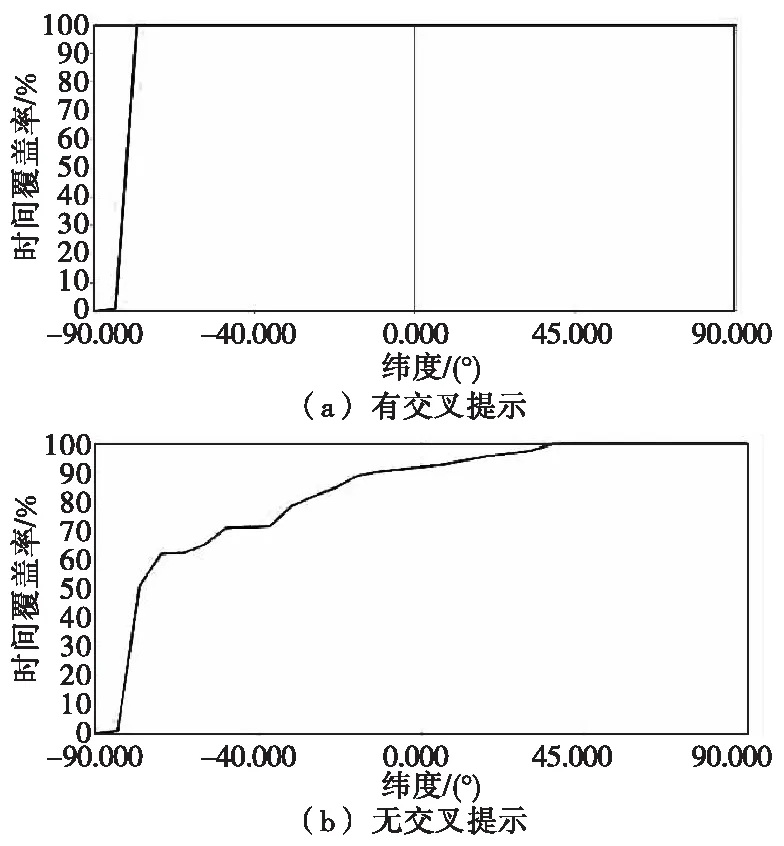
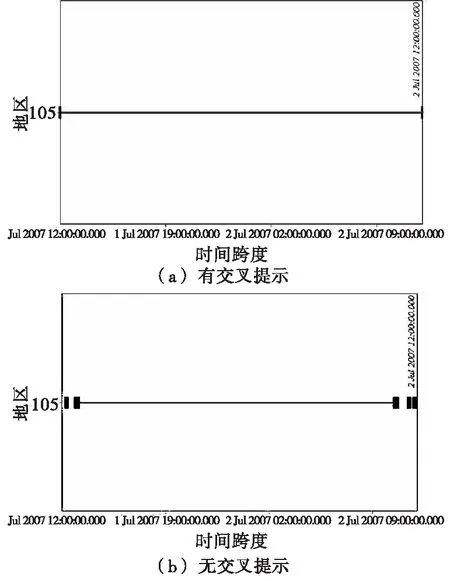
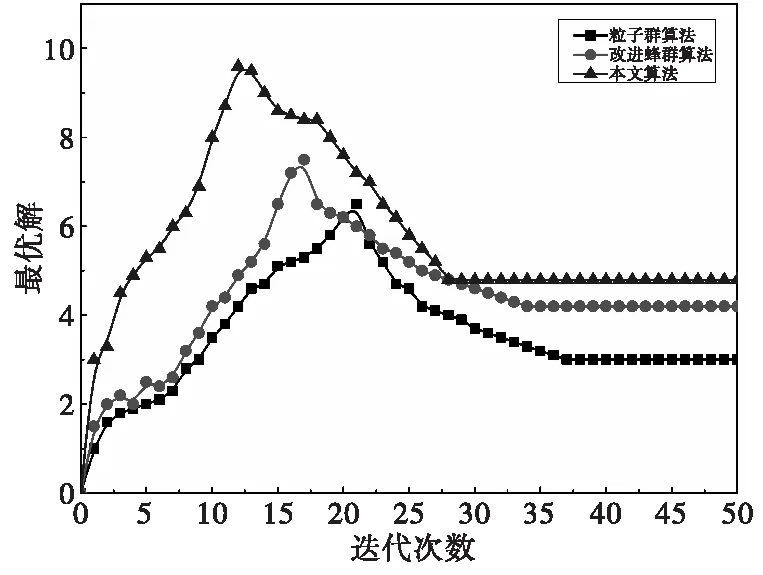
以两个传感器为例进行分析。假设传感器s1和传感器s2之间的距离为l,s1和s2的探测半径和通信半径分别为r1,R1;r2,R2。假设r1 R1≥l (1) R2≥l (2) r1+r2≥l (3) s1和s2之间发生提示的条件示意图如图1所示。 图1 两个传感器产生提示的条件Fig.1 The conditions for two sensors to generate hints 2.2.2多传感器交叉提示概率分析 1) 目标静止情况 假设s1为提示传感器,s2为被提示传感器,r=r1=R1=r2=R2,假设目标处于S0=S1∩S2区域内时,记s1对s2提示为事件A,事件A发生的概率记为P(A),则有: P(A)=S0/S1 (4) 式(4)中,S1为s1的探测区域,S2为s2的探测区域。 经过几何分析计算可得: (5) 2) 目标运动情况 若目标在运动过程中将要“逃离”s1的探测区域,这是就需要s1提示其它传感器进行任务交接,设s1对s2进行任务交接为事件B,事件B发生的概率记为P(B),则有: P(B)=P(A)·(1-(S1∩S2)/S2) (6) 假设当S1=S2时,有: P(B)=P(A)(1-P(A)) (7) 3) 一般情况 若忽略r=r1=R1=r2=R2,则有: (8) 当l=100时,P(A)、P(B)与r1、r2关系如图2所示。 图2 P(A)、P(B)与r1、r2关系Fig.2 Relationship between P(A)、P(B) and r1、r2 2.2.3多传感器组网协同探测 为了更好地说明利用多传感器交叉提示技术可以将地基、海基、空基、天基预警系统组成的多传感器组网探测系统实现对临空高速目标的有效探测,本文选取HTV-2作为目标进行分析,图3给出了HTV-2作战飞行轨迹图和在飞行过程中应用多传感器交叉提示技术进行协同组网探测的示意图。 图3 多传感器协同组网探测体系示意图Fig.3 Schematic diagram of multi-sensor coordination network detection system 从图3中可以看出多传感器交叉提示自动发生在各个传感器之间,在整个过程中,不接受作战控制指挥中心发送的命令,或受到作战指挥控制中心的有限控制,只是将信息返回到信息处理节点,通过交叉提示将得到的信息进行融合[18-19],有助于实现整个系统性能的优化,从而获得更为详细的目标信息,提高探测的精度,减少目标位置和属性的不确定性。 因此,面向临空高速目标探测的多传感器交叉提示具体工作过程如图4所示。 1) 综合融合中心预先存储信息以及在目标环境中传感器节点接收到的反馈信息,如临空高速目标的特征数据和空间位置等数据进行信息融合[20],产生期望性能指标并判断是否满足性能指标和提示条件,不满足,则需要进行交叉提示; 2) 根据提示需求产生交叉提示任务,即任务类型和任务优先级,主要包括目标的探测、跟踪、识别以及能够保证在探测和跟踪范围内的被提示传感器集合。 3) 提示传感器根据某种原则、方法、机制(即提示算法)将任务信息提示给被提示传感器集合中的传感器,被提示的传感器根据任务信息对自身所测量的信息精度和探测范围进行对照并做出响应,以确定如何进行传感器调度通过控制传感器的视场、工作模式、时间范围等参数以及任务执行方式进行信息的获取,最终实现全面探测与稳定跟踪。 图4 面向临空高速目标探测的多传感器交叉提示过程Fig.4 Multi-sensor cross cueing technology for near space high-speed targets detection 本文主要通过卫星工具箱(STK)软件进行建模、仿真和分析。STK软件主要对复杂任务进行建模,如飞机、卫星、地面车辆、舰船及其传感器等,评估其在真实环境或仿真环境下的性能,可以解决空间位置特性、设施位置及方向等动态分析难题。 本文将传感器细化到具体某一设备,即假设部署4颗地球同步轨道卫星(GEO)、2颗大椭圆轨道卫星(HEO)、12颗低轨卫(LEO)、2个临空基探测器、2个空基探测器、4部地基探测雷达。 1) GEO是回归周期为1个恒星日(1436.1 min)在赤道附近,倾角和偏心率均为0的圆轨道。距离地面为3 600 km,按经度均匀覆盖在80°S~80°N范围内。 2) HEO部署的近地点约为500 km,远地点约为50 000 km。轨道倾角为63.4°,向高北纬度地区提供通信服务,轨道回归周期为16 h。 3) LEO分别部署在三个轨道平面,距离地面1800 km,回归周期90 min。 4) 临空基探测器部署在距离地面20 km处,探测距离1800 km,空基探测器部署在距离地面5~10 km,探测距离1 400 km,6部地基探测雷达固定部署。 5) GEO、HEO、LEO上均搭载扫描型和凝视型两种探测器,视场范围分别为10°×20°和0.5°×0.5°。 平台搭建结果如图5所示。 图5 平台搭建结果图Fig.5 Platform building result diagram 静态覆盖效果如图6所示。从图6可以看出,全球大部分区域已基本实现覆盖,可以满足全球预警探测要求,重点监测区域可以实现多重覆盖。 图6 静态覆盖效果图Fig.6 Static coverage effect diagram 通过仿真平台的搭建和图4对临空高速目标探测的多传感器交叉提示过程的分析,现考虑将多传感器探测体系中是否运用多传感器交叉提示技术进行对比实验,对系统的动态覆盖效果进行仿真分析,以覆盖率为主要性能指标,从动态覆盖效果、时间满足效果、时间覆盖效果、对某重点探测区域的覆盖效果几个角度进行仿真分析。 1) 动态覆盖效果 动态覆盖效果图如图7所示。 根据图7(a)可知,在运行周期内,全球覆盖率超过99.39%,覆盖范围接近99.93%。而图7(b)说明在不利用交叉提示技术时,覆盖率最高仅能达到93%,可见多传感器交叉提示技术可以在协同探测中起到一定的作用,基本可以实现对目标的连续高概率探测。 图7 动态覆盖效果图Fig.7 Dynamic coverage effect diagram 2) 时间满足效果 时间满足报告图如图8所示。 图8 时间满足报告图Fig.8 Satisfied by time diagram 从图8(a)可以看出在整个运行周期内,系统每一时刻对整个覆盖区域中满足两颗星同时看到的栅格相对于整个覆盖区域的百分率达到93.6%,为后续与地基平台协同跟踪提供了支撑。但图8(b)的时间满足度低,只能达到80%左右,而且波动幅度较大,探测效果较差。 3) 时间覆盖效果 时间覆盖效果图如图9所示。 图9 时间覆盖效果图Fig.9 Time coverage effect diagram 从图9(a)、(b)两幅图可以看出,平台均能满足在覆盖区域内对临空高速目标探测的需要。但是(a)图在南纬75°左右实现了飞行的全部时间内实现探测跟踪,而(b)图在北纬45°才实现全时间探测,满足在覆盖区域内对临空高速目标探测的需要。 4) 对某重点探测区域的覆盖效果 下图10为对某重点探测区域的覆盖效果分析。 图10 地区覆盖持续时间图Fig.10 Region coverage time diagram 从图中可以看出对于重点探测区域,在协同组网中应用多传感器交叉提示技术可以实现时间间隔内全覆盖,对重点关注地区实现全天候连续探测,但是不采取交叉提示技术在探测过程中存在盲区,不能实现全程探测,因此运用多传感器交叉提示技术在某些程度上来说具有一定的军事意义。 为验证本文所提交叉提示算法的先进性,本文将其与改进蜂群算法和粒子群算法进行对比分析,进行50次蒙特卡洛实验来验证本文提出的算法在预警探测体系中的重要作用,结果如图11和图12所示。 图11 三种算法性能对比Fig.11 The comparison of three algorithms 图12 三种算法运行时间对比Fig.12 The comparison of three algorithms’ running time 由图11和图12可知,三种算法均收敛,但是本文算法在迭代13次后达到最优解而且求解精度较高同时算法运行时间最短;相比而言粒子群算法在求解精度和算法运行时间上次于改进蜂群算法。通过以上分析表明本文算法在预警探测中可以起到重要作用,验证了算法的先进性,同时说明该算法可以更好的实现对目标的连续高概率探测。 本文提出了基于多传感器交叉提示的临空高速目标探测体系。该体系通过分析临空高速目标的探测需求并对传感器交叉提示基本概念、发生条件和传感器部署距离进行定量计算,通过搭建多传感器协同探测仿真系统对比分析有无运用交叉提示技术对目标覆盖效果的影响,同时对比的方式验证了不同算法对预警探测的影响。仿真结果表明,天基、空基、地基(海基)等多传感器组网能够有效弥补单一探测平台的不足,并证明了多传感器协同组网探测的必要性和可行性。同时表明本文算法在收敛速度、求解精度和算法运行时间上均优于改进蜂群算法和粒子群算法,验证了算法的先进性。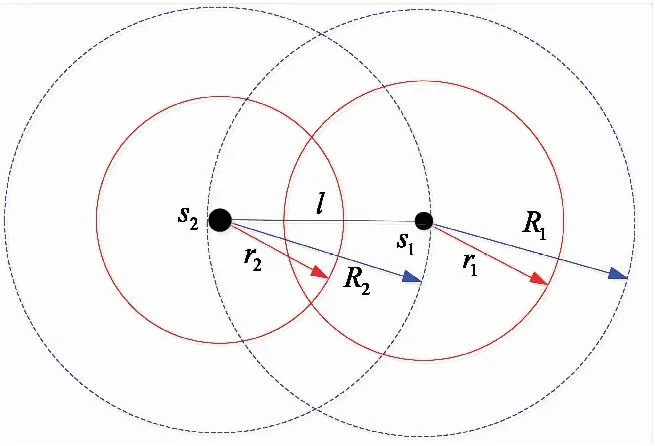


3 仿真分析
3.1 平台搭建
3.2 系统静态覆盖效果分析
3.3 系统动态覆盖效果分析
3.4 不同算法对预警探测的影响

4 结论
