基于改进关联规则的卸船机故障预测模型
2019-11-05叶永伟程毅飞赖剑人任设东
叶永伟 程毅飞 赖剑人 任设东
浙江工业大学特种设备制造与先进加工技术教育部/浙江省重点实验室,杭州,310014
0 引言
桥式抓斗卸船机是企业港口生产中重要的大型散料卸货工具,具有抓斗起升和开闭、小车行走、前大梁仰俯及整机沿轨道行走的功能,在实际生产中占有很重要的地位。卸船机发生故障会影响到原有功能,有可能出现严重的事故,造成经济损失[1],因此有必要对卸船机系统的健康状态进行监测、故障分析和故障预测,以确保卸船机安全稳定地运行,提早预警,减少因突发故障产生的经济损失以及避免人员伤亡等重大事故的发生[2]。
故障趋势预测方法作为短时预测方法,主要包括基于机理模型和基于数据驱动的故障预测方法[3-4]。近年来,随着传感器技术和信息处理技术的发展,基于数据驱动的方法由于仅需利用设备运行状态的监测数据就能及时地反映出设备的性能状态,实现故障预测而被广泛应用。传统方法中,基于数据驱动的港口船机故障诊断方法主要有:神经网络故障诊断方法模拟船机复杂的非线性系统,以故障特征信号作为神经网络输入,诊断结果作为网络输出;专家系统故障诊断方法通过求解船机复杂的实际问题,推断船机故障所在;小波分析方法利用信号变换特征进行故障识别;故障树诊断方法寻找船机的故障致因;粗糙集理论用于挖掘船机中隐含的知识,揭示潜在的规律;多传感器信息融合诊断技术获取船机各种特征参数信息,建立船机故障的预测、定位和排除模型等[5-6]。其中,基于多传感器信息融合故障预测模型主要根据设备正常工作与异常工作状态提取分析各种特征参数的变化信息来实现设备故障的预测过程。如桥式抓斗卸船机这种工作环境比较恶劣,易受到载荷、工况变化等不确定因素影响的设备,其运行过程状态呈现出动态的、实时变化的特征。因此采用关联规则分析方法获得表征卸船机状态的关联规则,并利用改进的多传感器信息融合故障预测方法能够准确地实现卸船机实时运作下的故障预测。
杨行舟等[7]研究了基于径向基函数神经网络的门式起重机故障诊断系统。崔英等[8]提出了融合远程监控、专家系统、智能诊断功能要求于一体的起重机远程监控及故障诊断系统。裴玮等[9]提出基于分布式光纤传感技术的动态数据时间序列分析模型,对起重机主梁进行损伤预警。吕金华等[10]采用小波包分解和神经网络相结合的方法对卸船机电机进行故障诊断。尚敬强等[11]将遗传算法与人工神经网络结合,并应用于起重机状态识别和故障诊断。舒安庆等[12]建立了故障树诊断分析门座式起重机臂架折断的主要风险源。田海雷等[13]建立了小波包分解和支持向量机相结合的预测模型,对液压泵进行故障预测。SAFIZADEH等[14]利用多传感器数据融合技术对滚动体振动故障进行了诊断研究。目前卸船机真实故障表现为多个故障特征信号相互耦合,仅对单一故障进行诊断不能根治整机系统故障隐患,应该深入研究系统内部各组成部分的相互作用和联结关系。桥式抓斗卸船机实际状态监测参量之间存在复杂的相关性,传统线性相关性处理方式并不适用于卸船机的实际工况。
本文采用兴趣度关联规则来表征卸船机的运行状况,引入权重系数来定量分析其状态特征变化,并将其应用到桥式抓斗卸船机故障预测中[15]。首先,利用改进的关联规则算法挖掘监测数据,获取表征卸船机状态的关联规则;然后计算故障类型与故障征兆、故障征兆与关联规则两两之间的关联关系,并确定其权重系数,构建卸船机预测模型;最后,通过实时监测关联规则组的状态变化,进行卸船机的状态评估和故障预测。
1 兴趣度关联规则理论
传统Apriori算法下的支持度-置信度框架体系,只能适应于离散型数据的关联规则挖掘,同时基于此框架的关联规则采掘存在许多弊端[16],文献[16]指出支持度阈值设定得过低或过高将会导致产生价值冗余的规则或丢失有用的规则,因此要避免将支持度作为最初项集产生的主要决定因素[17]。针对桥式抓斗卸船机监测数据特征,先将其进行聚类离散化处理,并用兴趣度I来反映关联规则中A和B的关系程度,用置信度C来反映这种情况的发生方向,用支持度S来反映这种情况是否为普遍规律。
1.1 兴趣度关联规则描述
关联规则(association rules, AR)表示数据库中隐含于若干项目之间且满足某种设定要求的关联关系的规则,可以定义为形如A⟹B(A称为规则的左侧,B称为规则的右侧)的蕴含式,其中A⊂T,B⊂T,A∩B=∅,T为事务数据库D中的事务项[18]。在关联规则中,记:
(1)数据库中所有事务项T的个数为|D|;
(2)T中项集A出现频率为f(A);
(3)A⟹B的支持度是D中包含A∪B的比例,用概率来表示,supp( )表示支持度,即
(1)
(4)A⟹B的置信度是D中包含A的同时又包含B的比例,用条件概率来表示,conf( )表示置信度,即
(2)
(5)S(A⟹B)min为关联规则的最小支持度,C(A⟹B)min为关联规则的最小置信度。
兴趣度是指基于统计独立性假设下真正的强度与期望的强度之比,给定交易集D上基于概率论的关联规则A⟹B的兴趣度[19]:
(3)
其中,值域为Mi,当I值远大于1时,表明这条规则越感兴趣,实际利用价值越大;当I值远小于1时,表明该规则的反面规则越感兴趣;I不小于0。
1.2 Apriori算法改进
Apriori算法不能直接用于工程领域数据库中属性为数值型(如应力)的状态参数,以及各运行设备和系统机械状态之间关联程度未知的情况,需先将其转化为布尔型关联规则进行挖掘[20]。根据桥式抓斗卸船机本身的关联特性和其生产规律以解决Apripri的适应性问题,本文将改进算法分为以下三部分。
(1)利用聚类算法将数据离散为布尔型。引入聚类算法离散,达到两方面目的:①分层聚类。考虑到桥式抓斗卸船机监测状态参数属于实时采集,数值型属性主要为振动烈度和应力值,故将数值型数据进行分区处理,转化为布尔型关联规则进行处理。②划分聚类。根据卸船机实际运行状态,保存数量较小的类,得到数据的实际分布结果[21]。

(3)引入兴趣度提高规则质量。利用兴趣度描述A和B之间的关系密切程度,避免支持度和置信度体系带来的局限性,排除支持度阈值过低和过高所引起的规则冗余、规则缺失等情况。在兴趣度-支持度-置信度框架运行过程中根据以下4种情况来筛选满意的关联规则(Cmin代表最小置信度,Imin代表最小兴趣度):①C
根据卸船机实际运行监测状态信息,排除情况④中反面规则的出现。
(4)改进的Apriori算法流程如图1所示。图中,mCA表示用于数据聚类的竞争聚类算法;L1表示1-频繁项集,K表示循环次数,LK表示K-候选项集。
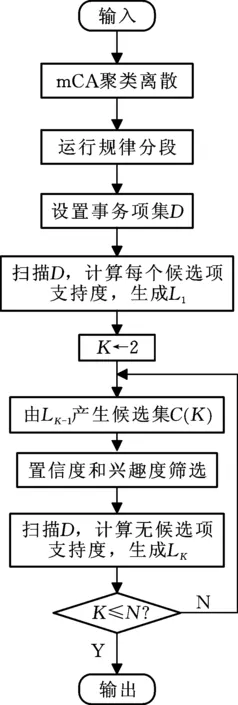
图1 改进后的关联规则算法流程图Fig.1 Improved algorithm flow chart of association rules
2 故障预测模型
利用目标系统历史测试数据、在线状态监测和测试数据,提取桥式抓斗卸船机系统在运行过程中不同阶段的状态变量,分别建立故障类型与故障征兆的权重关系,故障征兆与反映卸船机状态特征的关联规则组之间的权重关系;将前述已监测的状态参数数据作为建模数据,建立训练数据驱动预测模型并对故障类型进行预测;最后进行故障预测结果判别。
2.1 故障类型与故障征兆权重关系
桥式抓斗卸船机实际运行过程中,当卸船机发生某一故障时,往往伴随着多个故障征兆,同样,一个故障征兆有可能对应多个故障类型[15]。因此,桥式抓斗卸船机故障预测的前提就是确定各种故障相对应的故障征兆。首先,确定桥式抓斗卸船机的故障类型及故障征兆,见表1。
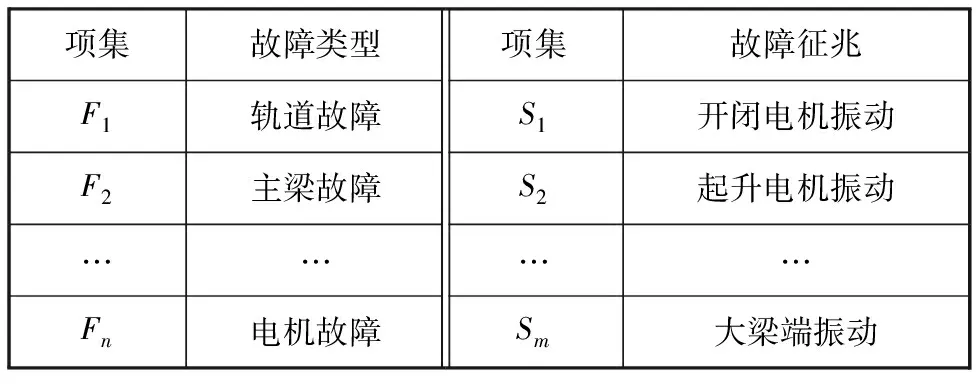
表1 卸船机故障类型及故障征兆
然后,采集相同工况下足够多的历史实验数据作为样本,分析故障类型与故障征兆之间的关联性,在卸船机故障类型与故障征兆关联分析中可以记:①事务数据库Di={第i个故障类型Fi发生};②项集Si={第i个故障征兆状态超标};③总样本中,各故障征兆Sn发生的状态量超标次数为f(Sn);④故障例总数|Dm|中,各故障征兆Sn发生的状态量超标次数为f(Sn∪Fm);⑤关联规则为Sn⟹Fm;⑥第m个故障类型Fm对应的约简后故障征兆为Sm,n,Fm={Sm,1,Sm,2, …,Sm,Nm},其中Nm为约简后Fm中故障征兆个数。
由式(1)和式(2)分别求得关联规则Sn⟹Fm的支持度S(Sn⟹Fm)和置信度C(Sn⟹Fm)。当支持度大于设定值时,认为此关联规则有效,即Sn与Fm之间存在紧密的相互关联关系。由置信度可得权重系数表达式:
(4)
式中,w′m,n为故障类型Fm中故障征兆为Sm,n的权重系数;Cm,n为相应的置信度。
2.2 故障征兆与关联规则组权重关系
故障征兆与关联规则组的权重关系实际上就是通过挖掘出的能表征卸船机状态的关联规则来反映与之相关的故障征兆。对每个关联规则赋予权重时,应使故障征兆状态特征中越重要的规则权重越大,并随着数据信息的不断更新对权值会有不同方位的收敛。根据各规则的属性权重比wi/wj(i,j=1, 2, …,n),构造权重比矩阵M:
其中,n是M的唯一非零特征根,记为λmax,而w是n所对应的特征矢量,并采用归一化的特征作为权重矢量:
构建基于关联规则支持度S、置信度C和兴趣度I的权重计算公式:
(5)
其中,wi(Si,Ci,Ii)表示规则RAi在故障征兆状态特征中的权重;Si、Ci、Ii分别表示该规则的支持度、置信度和兴趣度。
2.3 构建预测模型
通过改进的兴趣度量化关联规则挖掘状态参数数据中反映桥式抓斗卸船机状态的关联规则,在同一子系统和工况下,筛选可以反映故障征兆Sj参量的所有关联规则RAj,k以及表征故障类型Fi的所以故障征兆Si,j,并分别计算故障征兆与关联规则组权重关系以及故障类型与故障征兆权重关系相对应的权重系数,构造故障类型与关联规则组的关联规则指向性特征约束函数:
(6)

桥式抓斗卸船机故障预测步骤如下。
(1)利用改进的兴趣度关联规则算法挖掘能表征卸船机状态的关联规则RAj,k。
(2)建立桥式抓斗卸船机故障预测模型(图2),并计算相应的权重系数。

图2 故障预测模型Fig.2 Fault prediction model
(3)计算关联规则RAj,k的置信度变化率Δ,并代入故障预测函数式(6)。
(4)预测评估故障发生类型。其中,Fi为第i个故障类型,Si,j为对应第i个故障类型的第j个故障征兆,RA1,e、RAi,j、RAn,g分别为对应故障征兆的关联规则。
通过桥式抓斗卸船机监测系统,获取原始监测数据源,利用时域分析方法获得以振动强度和应力值为特征的数据类型为数值型的数据库。振动强度是指振动速度的有效值(均方根值),能够反映机械振动状态简明综合、实用有效的特征量,其计算公式为
其中,v(n)为振动速度,N为所测信号长度,VRMS为振动强度能量值。以此数据库为挖掘点,经上述预测模型流程进行故障预测。桥式抓斗卸船机故障预测流程如图3所示。
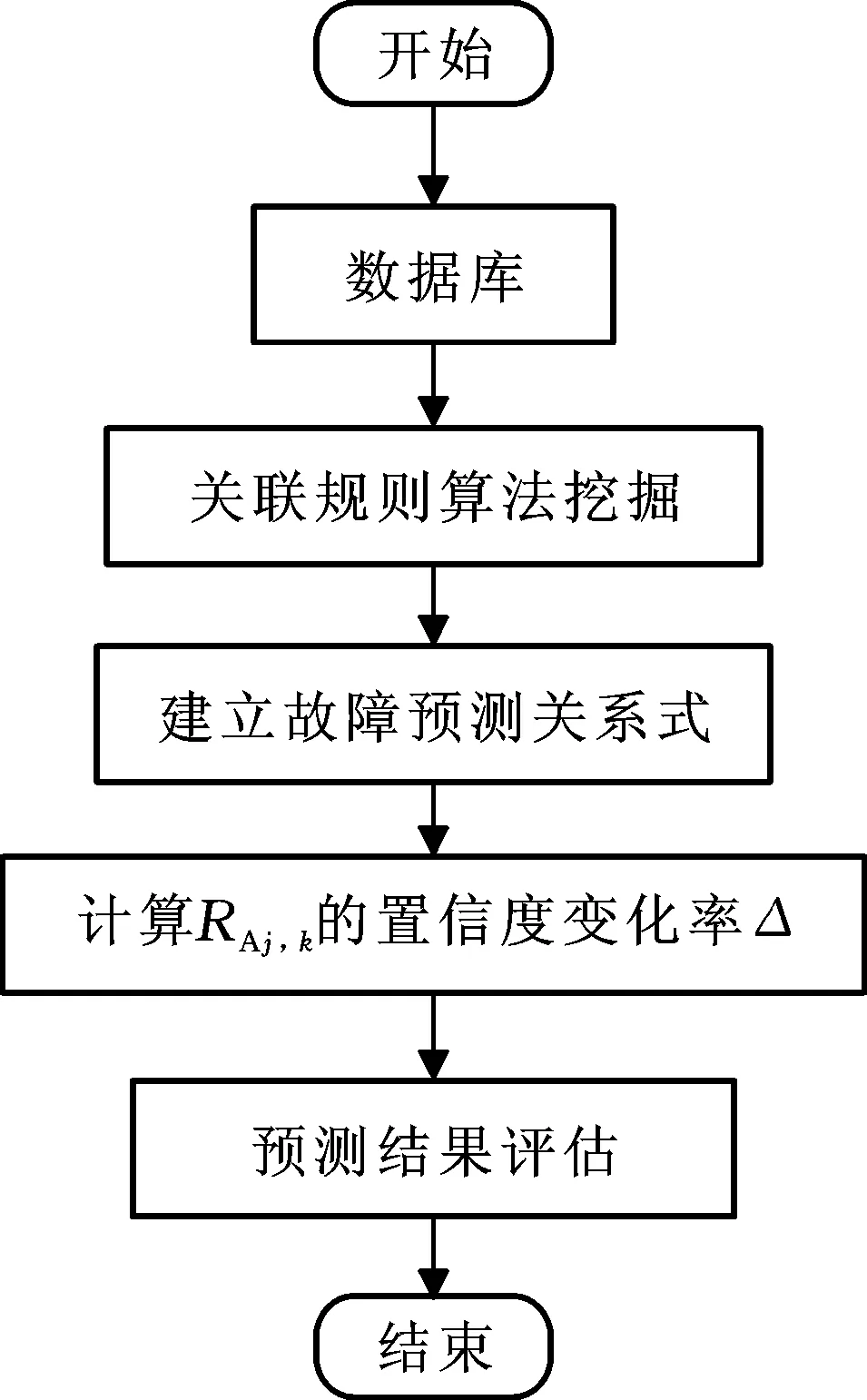
图3 故障预测流程图Fig.3 Flow chart of fault prediction
3 实例分析
3.1 监测数据源
针对某港口1号桥式抓斗卸船系统布置状态监测传感器,监测布置点见表2。采用该监测系统中2017年2~12月份的部分监测数据,每月选取500行数据,共5 000行,作为数据挖掘的数据源。桥式抓斗卸船机机械状态在线监测的主要内容是四卷筒系统、变幅系统及大车运行系统中驱动电机和减速器的振动,金属结构系统中大梁、小门架等金属结构受力和轨道、大梁及小门架振动。为全面监测卸船机的机械状态,在卸船机主要位置布置了37个传感测点,这些测点按监测点位置分成5组:第Ⅰ组监测四卷筒系统驱动电机、减速器的振动;第Ⅱ组监测变幅系统驱动电机和减速箱的振动;第Ⅲ组监测大车运行系统驱动电机和减速器的振动;第Ⅳ组监测金属结构系统中大梁、小门架及轨道上的振动与冲击;第Ⅴ组监测大梁、小门架等金属结构的受力情况。(X向:小车运行方向;Y向:垂直方向;Z向:大车运行方向)桥式抓斗卸船机机械状态用各监测点测量的特征值表示。通过时域分析方法处理振动信号的原始数据,获得各驱动电机、减速箱及金属结构振动的振动强度特征值,大梁及拉杆等金属结构的受力状态用应力值表示。卸船机机械状态在线监测过程中会产生海量的卸船机动态数据,这些数据将作为卸船机故障预测研究的数据源。

表2 卸船机监测点布置说明
3.2 关联规则挖掘
为使对桥式抓斗卸船机状态监测数据的关联规则挖掘更有针对性,选择状态监测中组Ⅰ、组Ⅱ、组Ⅲ和组Ⅴ的监测点数据作为关联规则的左侧,组Ⅳ中的数据作为关联规则的右侧。首先,将采用的数据进行预处理,排除卸船机停机时和异常状况下(包括恶劣天气、设备故障)的异常数据,通过改进的Apriori算法挖掘,获得表3所示的A9监测点振动烈度的部分数据聚类结果,振动强度数值将分为4类离散数据,从而将数值型数据转化为布尔型关联规则挖掘;然后,利用其算法通过支持度和置信度阈值采掘以及兴趣度阈值过滤输出关联规则,考虑到实时采集数据和卸船机工作的特点,设定最小支持度为10.0%,最小置信度为50.0%,最小兴趣度为1.5;最后,分别筛选获取能表征四卷筒系统、变幅系统及大车运行系统机械状态的关联规则,部分关联规则见表4~表6。
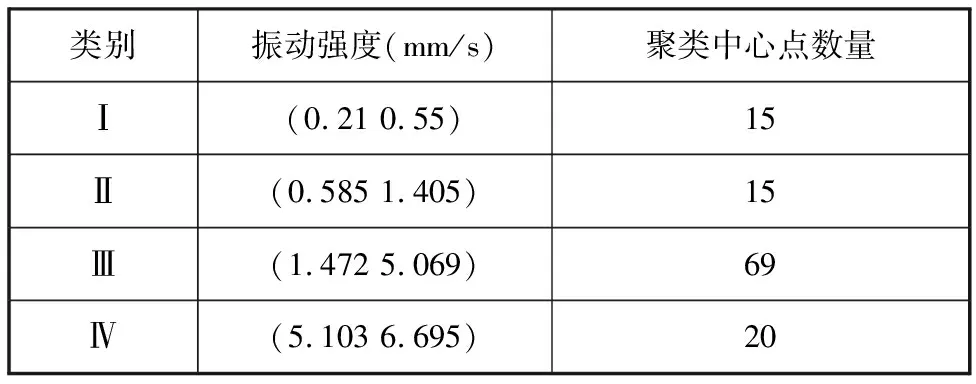
表3 A9监测点数据聚类结果
表4部分关联规则是采用组Ⅰ和组Ⅴ获取的监测数据对四卷筒中小车运行状态的规则挖掘,由表4分析,规则1和8分别代表开闭和小车电机同时运作时的模式。规则2和7代表起升和小车电机共同运行时的模式。规则4为三者电机同时运作时的模式。规则3、5和6分别代表小车、起升和开闭电机单独运行时的模式。
表5部分关联规则是采用组Ⅱ和组Ⅴ获取的监测数据对变幅系统运行状态的规则挖掘,由表5分析,规则1代表变幅电机单独运作时的模式。规则2代表整个变幅系统共同运作时的模式。规则3代表大梁变幅升降减速时的模式。

表4 四卷筒系统部分关联规则
注:表中S、C、I变量分别表示支持度、置信度和兴趣度的数值。括号内数据区间单位为mm/s。不再赘述。
表6部分关联规则是采用组Ⅲ和组Ⅴ获取的监测数据对大车运行系统运行状态的规则挖掘,由表6分析,规则1和2分别代表大车1号和2号电机单独运作时的模式。规则3表示大车减速运行过程中的模式。规则4代表大车运行系统整机共同运作时的模式。

表5 变幅系统部分关联规则

表6 大车运行系统部分关联规则
3.3 故障预测
桥式抓斗卸船机的故障种类很多,本文依据现有研究成果及现场的故障信息反馈,将卸船机系统常见故障类型分为6种,见表7。
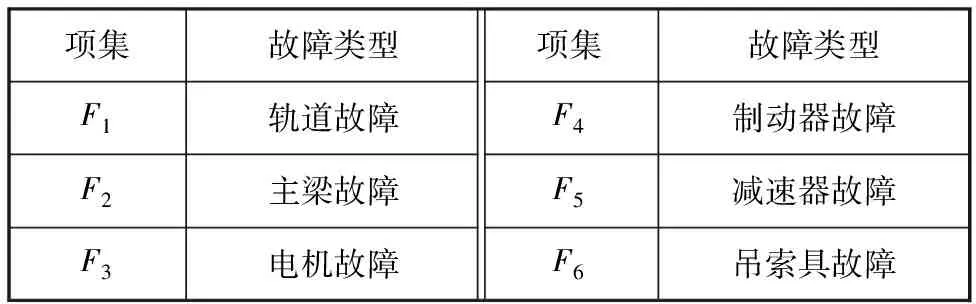
表7 卸船机的故障类型
桥式抓斗卸船机的状态信息繁多,如果考虑所有状态信息,故障预测体系将极为复杂,而且有些状态信息模糊,不利于对卸船机进行预测评估。本文选取具有代表性且能准确有效反映卸船机运行状态的状态参量作为表征卸船机各类故障类型的故障征兆。最终选取表8中的24个状态参量作为故障征兆进行状态评估。

表8 卸船机的故障征兆
为了更明确地描述设备故障预测模型的实现过程,不失一般性,只给出小车运行状态故障预测分析,整理分析由某港口起重机械有限公司提供的关于小车运行系统的部分历史试验数据(表9)。

表9 小车系统历史测试样本数据
根据表9中故障类型所对应的故障征兆的支持度,利用最小支持度阈值对其进行简化,建立卸船机小车运行系统故障类型与故障征兆的关联关系,见表10。
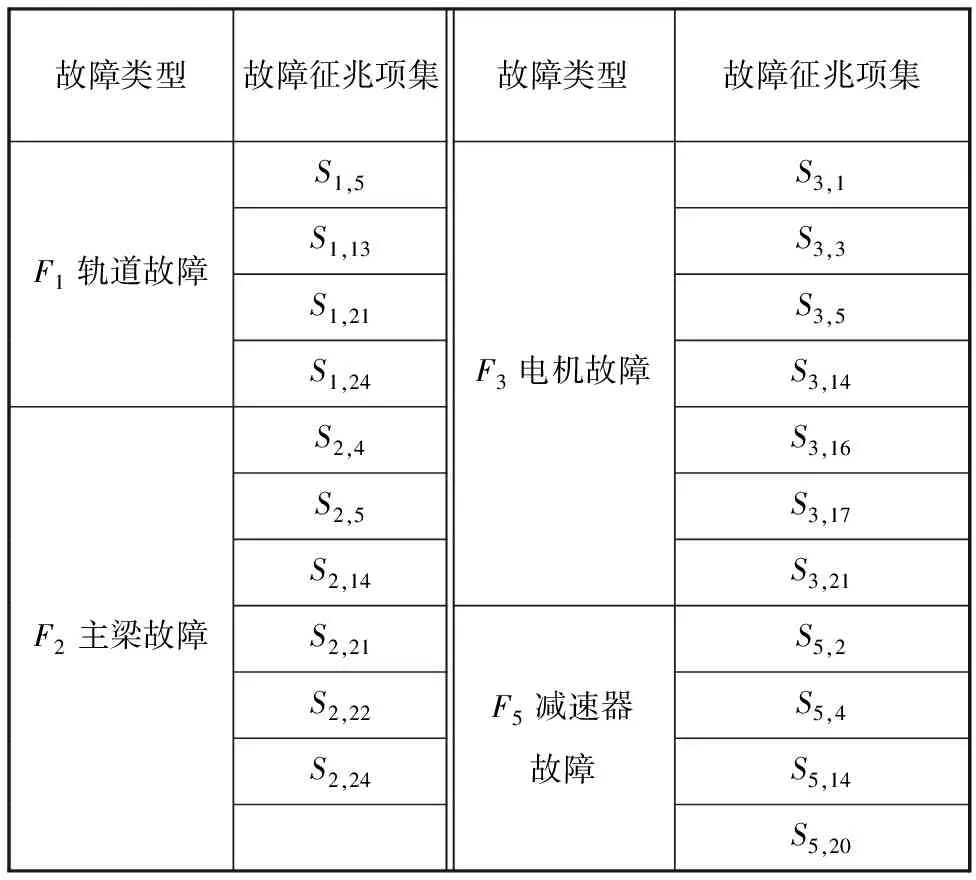
表10 故障类型与故障征兆的关联关系
以下故障预测以小车运行系统中“轨道故障”F1为故障预测实例,计算其对应故障征兆的权重系数。记事务数据库D1={轨道故障},且|D1|=|F1|=135,N1=4。故障征兆S1,5、S1,13、S1,21、S1,24在F1中的超标次数分别为110, 120, 130, 103;在总样本中的超标次数分别为330, 126, 365, 190。由式(2)可得这4个故障征兆在轨道故障中的置信度:C1,5=33.3%,C1,13=95.2%,C1,21=35.6%,C1,24=54.2%。将计算得到的置信度代入式(4)可得相应的权重系数:w′1,5=0.153,w′1,13=0.436,w′1,21=0.163,w′1,24=0.248。
以上述F1为例,通过小车运行系统关联规则输出表中关联规则与故障征兆状态参量之间的关系,建立故障征兆S1,1、S1,2、S1,3、S1,4(即S1,5、S1,13、S1,21、S1,24)与卸船机状态关联规则组之间的关系,并利用权重计算式(5)计算其权重系数,见表11。
选取“轨道故障”F1发生前一个月的历史数据作为实验验证数据,通过RA数值波动图,其中RA3((A9,A10,S2,S3)⟹D4)关联规则部分数据波动如图4所示,分别计算表11对应的标准关联规则的置信度变化率,见表12,通过判断标准关联规则的稳定性,获得反映卸船机状态的改变程度,根据现场故障信息反馈以及经验知识,设定故障预测函数阈值为30%。将表12中置信度变化率代入故障预测函数式(6),求得F1的故障预测
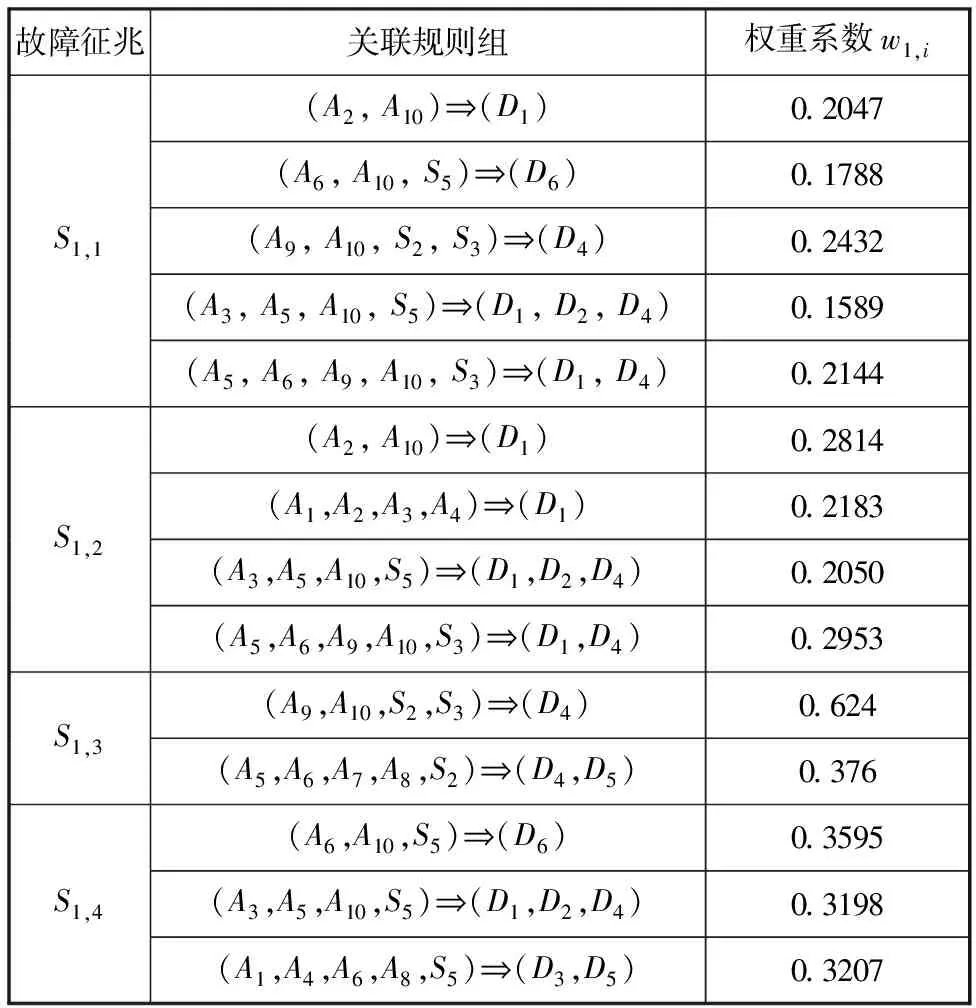
表11 故障征兆与关联规则组权重系数表
函数值为36.865%,其函数值大于设定故障预测阈值,可实现故障预测。

图4 RA3数值波动图Fig.4 RA3 numerical wave diagram
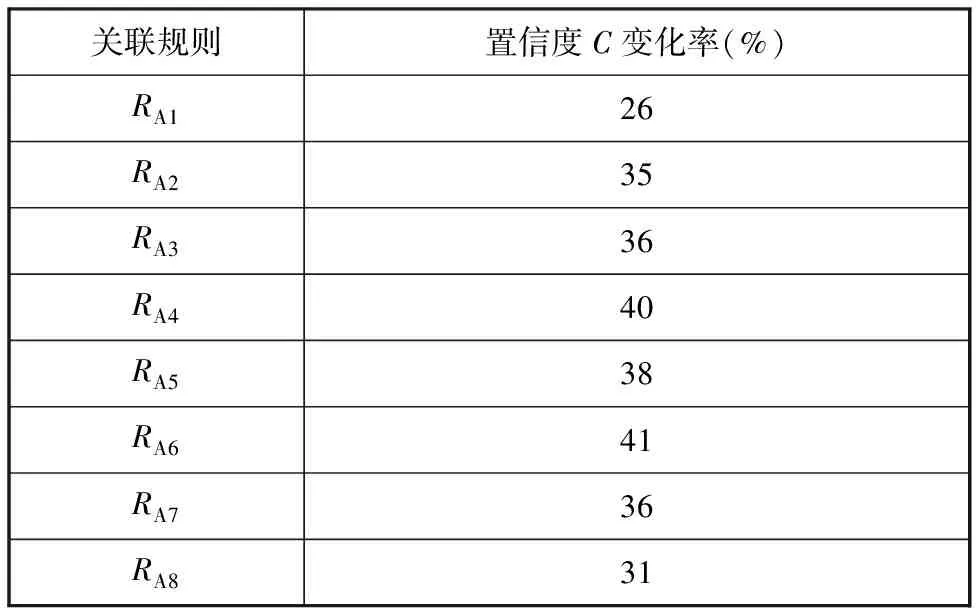
关联规则置信度C变化率(%)RA126RA235RA336RA440RA538RA641RA736RA831
“轨道故障”F1故障预测只是其中一个故障案例,不失一般性,其他故障类型同样可以用相同的权重兴趣度关联规则预测方法对桥式抓斗卸船机故障类型进行预测,实验结果表明,该方法可有效地预测故障发生前的故障信息变化状态,以便提前做出技术处理,避免故障发生,对提高企业的经济效益具有现实意义。
4 结论
(1)采用兴趣度关联规则算法获取能够表征卸船机状态特征的关联规则,通过计算支持度、置信度和兴趣度,分别得到卸船机故障类型和故障征兆状态量的权重系数、故障征兆和规则组的关联耦合关系以及权重系数,一定程度上避免了专家意见或经验的主观性的问题;利用上述两两参数间的权重系数构建卸船机故障预测函数模型,通过实际关联规则状态变化的对比捕捉早期微弱的机械故障状态变化信息。
(2)实例分析结果表明,多种数据分析方法的融合运用能够获取较好的状态评估和故障预测效果,并且在多故障问题的处理中也表现良好,具有较好的可预测性和准确性。
