克服“中国式过马路”现象的交通信号控制
2019-11-05余秋婷熊俊俏
余秋婷,熊俊俏
(武汉工程大学 电气信息学院,武汉430205)
现如今,交通路口信号灯大部分采用固定配时方案,在行人高峰时难免会形成“中国式过马路”现象[1],这样极易发生交通事故。为了缓解行人和车辆通行之间的矛盾,从“以人为本”的角度,考虑一种自适应控制的方法,通过检测等候的行人数量和行人等候时间来实现信号相位的转换,优化交通时间配置,从而降低事故发生概率,提高交通资源的利用率。
目前,交通信号的控制方法主要有:①固定信号配时,一般的交通路口设置红灯时长为30 s~90 s不等,据报道国人等待的忍耐限度仅为15 s,因此往往在行人高峰时段,就会出现 “中国式过马路”现象;②按键式中断主路信号配时,行人通过触发按钮发出过街信号,信号相位转换为行人通行信号,这种方式提高了行人过街的安全性[2],但长期使用会造成按键的损坏和系统响应不及时等情况,不适用于繁忙的交通路口;③自适应信号配时,可通过微波雷达、红外、激光、视频等传感器对行人进行自动检测[3],根据行人的特性来进行信号配时,提高了交通资源的利用率。
微波雷达传感器虽检测精度不受天气影响但一般不能检测低速和静止的目标,红外传感器可检测静止目标但检测精度易受环境影响,激光传感器具有易于安装、维护的优点但当行人相互重叠时检测精度低。
由于视频传感器采集信息丰富、 直观且安装、维护方便,本文基于行人视频检测技术检测行人数以及行人等待时间,设计了基于路口等待过街行人检测的交通信号控制。利用背景差分法将摄像头检测到的视频图像信息进行处理,依据过街行人数和等候时长进行交通信号配时,并进行了交通仿真与分析。
1 基于行人检测的交通信号系统
基于行人检测的交通信号系统由行人视频采集、行人检测算法和信号配时三部分组成。图1所示为基于行人检测的交通信号系统流程[4]。

图1 基于行人检测的交通信号系统流程Fig.1 Traffic signal system flow chart based on pedestrian detection
1.1 行人检测算法
运动目标检测算法主要有帧间差分法、光流场法和背景差分法[5]。帧间差分法虽然实现简单,对场景不敏感,但检测精度不高,不能提取完整区域。光流场法能够完全提取动态信息,摄像头移动时也能进行检测,但计算复杂、耗时,对光线和噪声敏感。背景差分法检测速度快,能实时检测行人,在相对静止的背景下检测精度较高。因此本文采用背景差分的行人检测算法。
行人检测算法包括行人等候区背景建模、背景更新、行人目标提取以及等候行人数和等候时长。
1.1.1 行人等候区背景建模
为得到具有实时性和鲁棒性的背景图像,本文采用多帧平均的方法进行背景建模,由于运动物体的灰度值与背景的灰度值之间存在着很大的差异,运动物体经过像素点位置时,就会引起该像素点位置的灰度值变化,因此可以通过计算一定时间段内的像素的平均值来获得背景图像[6]。本文提取N 帧图像进行背景建模,N 的值越大或者说累加的图像帧数越多,背景图像就越是接近真实。表达式为

式中:Bn为采集多帧图像建立的平均背景;N 为帧数;fi为每一帧图像。
1.1.2 背景更新
外界光线的变化会对背景模型产生一定的影响,因此需要对背景模型进行实时更新,来适应场景的变化,使得检测效果更好。对没有前景目标的像素点更新。更新的算式如下:

式中:Bn为新的背景值;Bn-1为前一帧的背景值。新的背景值可以通过前一帧背景值以及当前图像和第fN-K帧图像递推得到。
1.1.3 行人目标提取
在实际应用中,当行人处于等待状态时,行人相对于背景来说处于禁止或者缓慢运动状态。本文采用背景差分法[7]。背景差分公式为

式中:fd(x,y)为差分图像;fc(x,y)为当前帧图像;fb(x,y)为背景图像。
行人检测表示为

式中:T 为分割阈值,当R(x,y)=0 时,表示为行人,当R(x,y)=1 时,表示为背景。
1.1.4 等候行人数和等候时长
行人在第t 帧的等候时长可以表示为

式中:Dt(x,y)=Dt-1(x,y)+1 表示当检测到有行人而且上一帧行人等候时长超过1 s 时的等候时长;Dt(x,y)=0 表示图像为背景时的等候时长。当系统进行初始化时,令t=0,此时等待的行人数为0,等候时长为0。
在第t 帧时的等候的行人数可以表示为

式中:#为像素的数目[8]。
1.2 信号配时
当未检测到行人时,人行横道信号灯则会一直保持红灯状态,车行道则一直处于绿灯状态;根据等候的行人数和等待时长来判断,一旦检测到有行人,且人数或者等待时长大于一定值时,则会开启人行横道通行信号[9]。行人过街信号时间Gt可以用以下算式表示[10]:
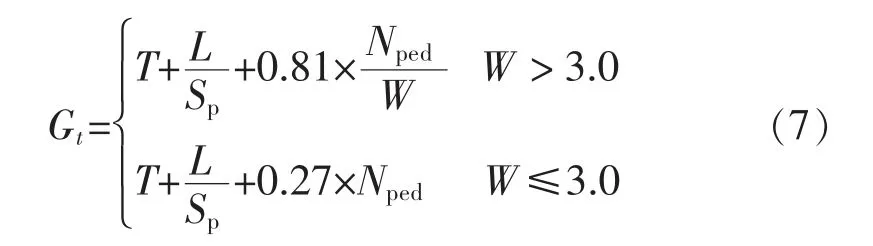
式中:T 为行人反应时间,一般取3.2 s;L 为人行横道的长度(m);Sp为行人的平均速度,一般取1.2 m/s;Nped为过街行人数;W 为人行横道的宽度(m)。
2 行人检测算法验证
根据路面实际情况,本文所测试实际场景的斑马线长16 m,宽4 m,行人等候区的面积为12 m2,摄像头置于行人等候区高4 m 处。根据等候行人数和等候时长,分别检测等待行人数为2 人、7 人、21人、31 人时,行人在等候区所占比例。由于拍摄时摄像头不稳定会导致拍摄角度产生偏差,这里选用3DS Max 软件模拟真实场景。图2为不同等待人数的场景图。
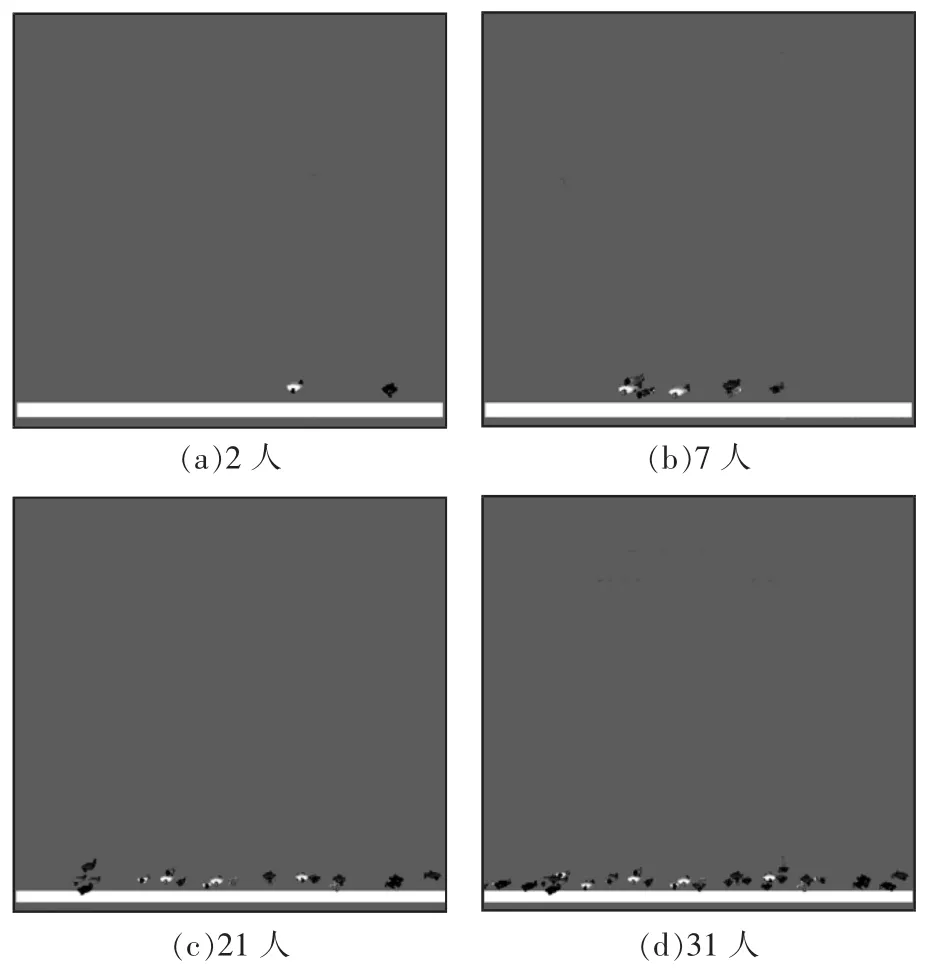
图2 不同等待人数场景图Fig.2 Different waiting people scene map
行人占等候区的比例为检测到的行人数所占面积与等候区的面积之比,理论上行人站立空间取0.06 m2。本文采用Matlab GUI 的可视化界面,将行人所占比例显示在界面上。图3为等待行人数为7人时的处理结果。

图3 行人检测处理结果Fig.3 Pedestrian detection processing result
可以得到不同等待人数所占等候区比例如表1所示。

表1 不同等待人数所占等候区比例Tab.1 Proportion of waiting areas for different waiting people
由表可以看出上述算法所得出的结果接近理论值,误差范围在5%以内,验证了算法的有效性。
3 信号控制优化仿真与分析
为了验证某干路路口的实际交通状况,对该路口下午5:30~7:30 的交通数据进行了调研,单向双车道的车流为平均每小时2000 辆,过街人流量为平均每小时500 人。将调研的数据在VISSIM 软件中进行仿真,模拟无信号控制(行人过街车让人)、固定配时信号控制以及本系统的信号控制,将这3种情况作比较并加以分析。
其中固定配时信号控制周期时长为100 s,车流方向绿灯时长为57 s,黄灯3 s,红灯为40 s,行人方向绿灯时长为40 s,红灯为60 s。车辆方向仿真结果如表2所示,行人方向仿真结果如表3所示。
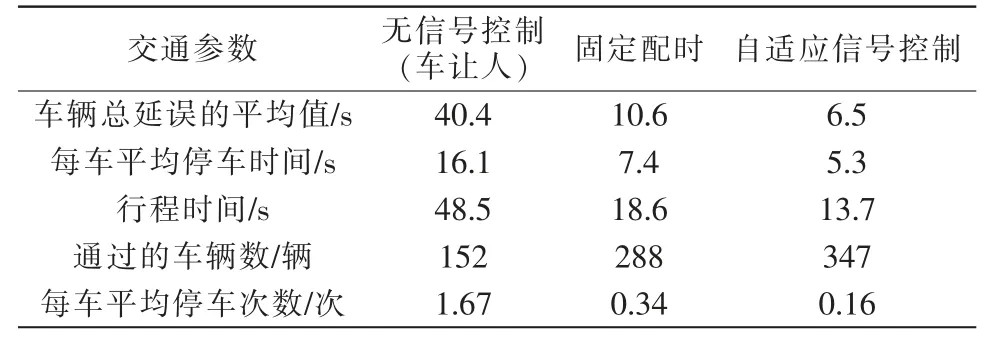
表2 车辆方向仿真结果Tab.2 Vehicle direction simulation results
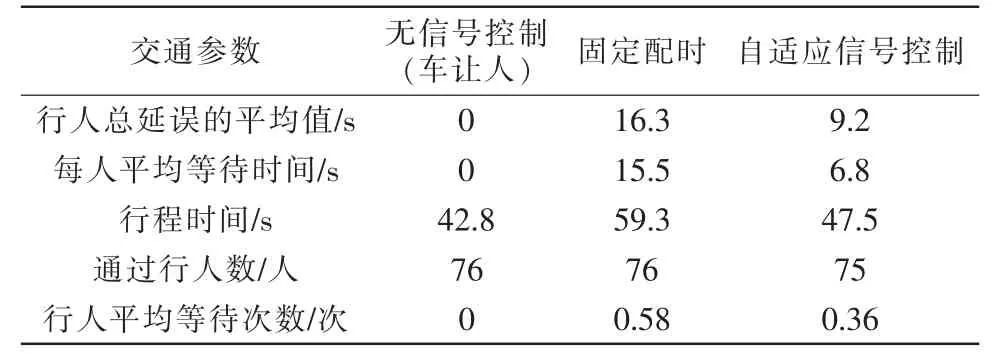
表3 行人方向仿真结果Tab.3 Pedestrian direction simulation results
从表2和表3中可以看出,无信号控制的路口不会对行人产生延误,但车辆的平均延误为40.4 s,行程时长为48.5 s;固定配时路口以车流为主,车辆的平均延误时间减少到了10.6 s,行程时间也减少了,为18.6 s,但行人的平均延误增高了,为16.3 s,平均等待时间也相对变长了,这就可能会出现行人闯红灯的情况,易造成交通事故;自适应信号控制路口车辆的延误时间减少到了6.5 s,行人的延误时间减少到9.2 s,可见自适应信号控制能减少车车辆和行人的延误,使交通路口更加畅通,也较少了交通事故的发生。
4 结语
经过实地调查和仿真分析,本文取得了如下进展:①通过背景差分法提取出前景行人目标,并运用Matlab 对算法进行验证;②通过VISSIM 仿真软件结合实地调查的数据进行模拟仿真,将无信号控制、固定配时信号控制、本系统信号控制进行对比,本文提出的自适应信号控制相对优化了行人和车辆的通行时间。本文目前只针对“中国式过马路”现象提出了改进,还需进一步研究车辆方面问题,这样可以更好地对时间进行分配,取得更佳的效果。
