APP下载
搜索
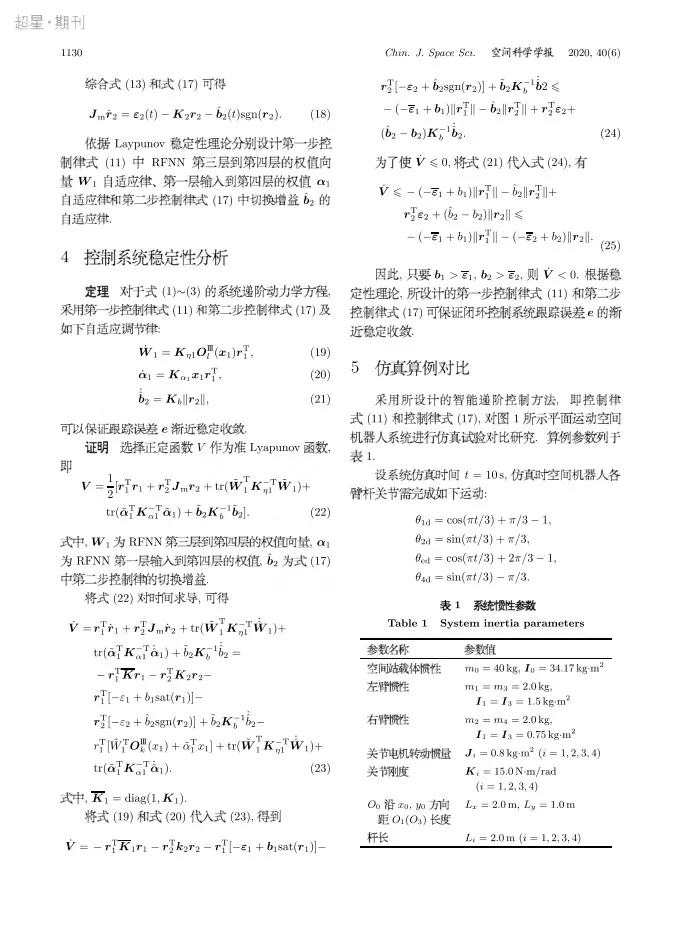
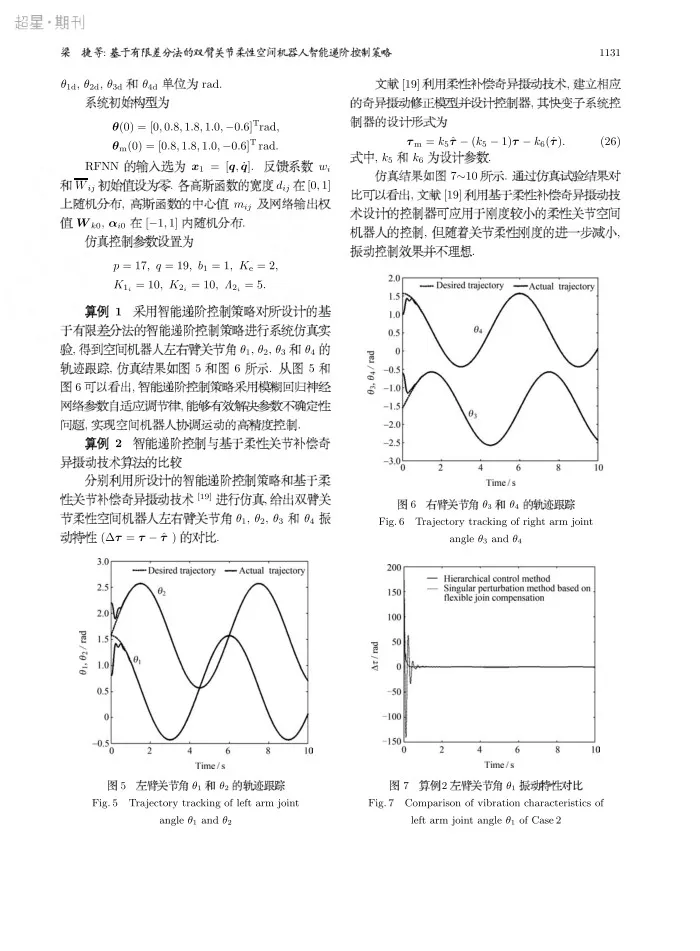
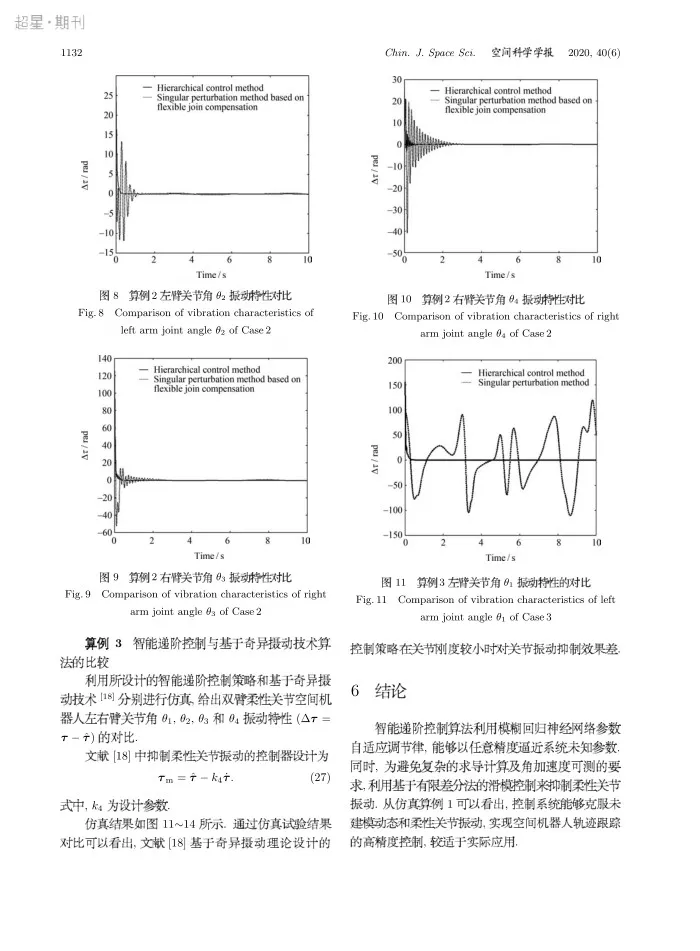
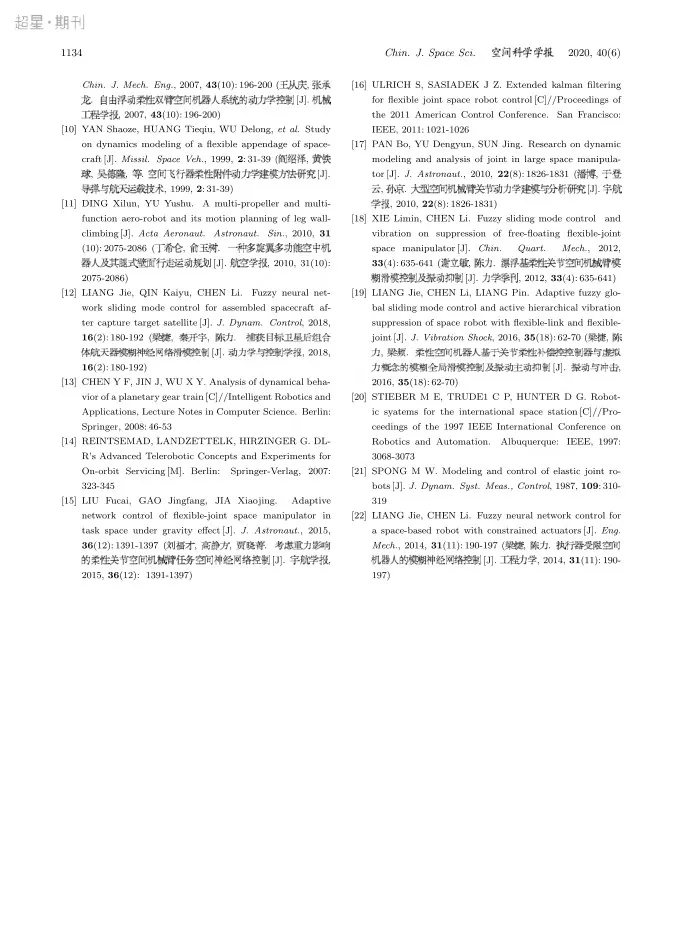
基于有限差分法的双臂关节柔性空间机器人智能递阶控制策略
2020-07-21
梁捷,秦开宇
空间科学学报
订阅
2020年6期
收藏
关键词:
差分法
双臂
柔性
猜你喜欢
差分法
双臂
柔性
一种柔性抛光打磨头设计
二维粘弹性棒和板问题ADI有限差分法
灌注式半柔性路面研究进展(1)——半柔性混合料组成设计
高校学生管理工作中柔性管理模式应用探索
空间机器人双臂捕获航天器操作的无源自抗扰避撞从顺控制
我在街上走
双臂掘进钻车
基于SQMR方法的三维CSAMT有限差分法数值模拟
有限差分法模拟电梯悬挂系统横向受迫振动
ABB YuMi®双臂机器人
杂志排行
《师道·教研》
2024年10期
《思维与智慧·上半月》
2024年11期
《现代工业经济和信息化》
2024年2期
《微型小说月报》
2024年10期
《工业微生物》
2024年1期
《雪莲》
2024年9期
《世界博览》
2024年21期
《中小企业管理与科技》
2024年6期
《现代食品》
2024年4期
《卫生职业教育》
2024年10期
空间科学学报
2020年6期
空间科学学报
的其它文章
中国科学院粒子天体物理重点实验室
空间科学学报第40卷研究论文总目次 2020年
基于目标特性的航天器太阳光压面积计算方法
基于单纯形法的TLE轨道确定
运用信息融合式高阶UKF的微小卫星姿态确定算法
空间碎片天基监测图像仿真研究