仿生人工肛门括约肌假体的机构设计和实验验证
2019-11-04王志武颜国正周泽润
鲁 姗,王志武,颜国正,周泽润
(上海交通大学 电子信息与电气工程学院,上海 200240)
肛门失禁会严重影响患者的生活质量和心理健康[1-3].解剖学研究发现,肛门内、外括约肌和耻骨直肠肌对控便起着至关重要的作用.耻骨直肠肌起源于耻骨,水平向后延伸形成一个U形吊环包绕在肛直肠交界处,收缩时会牵引直肠形成一肛肠角,实现控便;放松时,直肠疏通,实现排便.肛门内、外括约肌通过收缩形成一个闭环闭合肛门实现控便.经过比较发现,耻骨直肠肌对固态粪便的控制起主要作用,而肛门内、外括约肌则对气态和液态粪便的控制起主要作用[4].
参照肛门内、外括约肌形成闭环的控制原理,人们先后提出了多种人工肛门括约肌.起源于美国医疗系统的AMS800为最早的人工设备,为治疗严重肛门失禁提供了一种新的医疗方案[5].AMS800的改进版有ABS和SAB[6-8],两者曾被应用于临床试验,但由于设备故障、感染和其他并发症的出现而不得不二次植入或者永久移除这些人工肛门括约肌.随后,文献[9-10]中提出了德国人工肛门括约肌系统(GAAS),首次引入经皮供能技术,并将液压驱动改为电驱动方式,但是过高的操作电压(电压峰峰值为30 V)是该人工肛门括约肌的一个潜在安全隐患.总体来看,人工肛门括约肌假体机构所面临的主要问题有:① 假体控便用的执行器为圆环套袖状,在植入时必须进行肠吻合术,感染和并发症的风险较大;② 液压驱动响应的时间较长,闭合压力较小;③ 机构容易渗漏.
为解决这些问题,本文提出了仿耻骨直肠肌式人工肛门括约肌假体(PAAS),其原理是模仿耻骨直肠肌牵引直肠形成肛肠角以实现控便.将PAAS的执行器设计为三环式结构,组合式固定环不需要截断肠道,从而PAAS可套装在直肠上以避免肠吻合术;相较于液压驱动,电驱动方式响应时间更短,能提供的夹持力更大;针对机构渗漏问题,柔性肠道压力传感器结合O型圈等密封件可进行有效密封.最后,通过离体肠道实验和防水实验证明PAAS的有效性和密封性能.
1 PAAS机构分析
1.1 PAAS工作原理
如图1所示,PAAS(64.5 mm×43.0 mm×33.5 mm,质量66 g)和体内线圈盒(直径 50.5 mm,厚度 5.9 mm,质量22 g)通过1根内部密封有电线的透明硅胶管相连,后者通过经皮能量传输系统[11]对PAAS进行充电.
PAAS工作方式如图2所示,当直肠被放置在执行器的上、下两个固定环内时,中环摆臂会在电动机的驱动下围绕支架旋转:顺时针旋转,中环牵引直肠,形成肛肠角,实现控便;逆时针旋转,中环复位,肠道疏通,进行排便.设置在环臂上的压力传感器用以控制摆臂对肠道的牵引程度,传感器检测值达到阈值上限时,中环停转,维持控便.

图1 PAAS实物图Fig.1 Photograph of PAAS

图2 PAAS工作原理示意图Fig.2 Schematic diagram of working principle of PAAS
1.2 PAAS机构概述
PAAS的主要结构为头部的三环执行器/尾部的密封支架和密封在支架内部的驱动模块.主要零部件的名称及功能如图3所示.密封盖板实现PAAS两端的密封;齿轮减速器与电动机相连,实现减速;内齿圈为减速器输出齿轮,与中环摆臂相对固定,并带动其转动;密封支架作为整个PAAS的龙骨,外连三环,内部密封驱动装置;O型圈实现环臂与套筒之间的密封;套筒(上、下)实现内齿圈和中环的相对固定;固定环配件在机构植入时打开,放入肠道后关闭;执行器分别为上、下固定环和中环摆臂;限位装置为霍尔元件(上)和磁铁(下);压力传感器检测肠壁受力.

1—密封盖,2—齿轮减速器,3—内齿圈,4—密封支架,5—O型圈,6—上、下套筒,7—固定环配件,8—执行器,9—限位装置,10—压力传感器图3 PAAS结构示意图Fig.3 Structure of PAAS

图4 PAAS减速器设计Fig.4 Design of the reducer of PAAS
1.3 PAAS减速器设计
为尽量减小PAAS的整体尺寸,如图4所示,将电动机和齿轮减速器全部设置在密封支架内部,实现由内到外的转动输出.直流电动机直径 10.0 mm,高度 20.8 mm,供电参数为 3.3 V×280 mA,转矩Mo=2.665 6 mN·m,其输出经历8级减速后传动到可绕支架旋转的内齿圈,后者和中环摆臂相对固定,进而带动中环围绕支架转动.
齿轮器所有齿轮模数为 0.2,由13个圆柱齿轮、4个复合齿轮以及1个内齿圈组成,其中复合齿轮的大齿轮齿数为43,小齿轮齿数为11,内齿圈齿数为91,最终减速比为 9 363.空载时,电动机额定转速为 10 400 r/min时,Mo=2.665 6 mN·m,则减速箱的输出转矩为
Mm=Monoηo
(1)
式中:Mm为不安装中环摆臂时减速箱的输出转矩;no为减速比;ηo为减速箱传动效率,经测量,其值为 0.16,则Mm=4.12 N·m.
实际上,安装中环之后,在滚珠和O型圈的影响下,减速箱转矩会进一步减小,具体讨论见后文.减速箱输出转速理论值为 1.1 r/min,但由于齿轮摩擦等因素的影响,其实际输出转速仅为 1.0 r/min左右.

图5 O型圈密封示意图Fig.5 Schematic diagram of O-ring sealing
1.4 减速器密封设计
PAAS的环臂套装在套筒上,为阻止液体沿套筒和支架间隙进入内部,在两者之间采用O型圈进行径向密封.如图5所示,上环套筒和支架之间相对固定,属于静密封;上、下套筒和中环摆臂一起围绕支架往复转动,属于动密封.为取得良好的密封效果,应考虑O型圈的压缩形变,压缩率
Wc=(do-h)/do
(2)
式中:do为O型圈线径;h为压缩后高度.
O型圈装进密封沟槽后,其与密封面的接触宽度b及其形变后宽度b0分别为
因为支架和套筒之间有旋转运动,所以选取O型圈的预压缩率为10%,截面直径为 1.5 mm,则可以得出h=1.35 mm,b=0.58 mm,b0=1.58 mm.因为文中为液体密封环境,所以b0应比沟槽宽度b1小 0.2~0.5 mm,这里选取b1=1.9 mm.因为O型圈用作旋转密封,洛氏硬度值大约为80,考虑到PAAS植入后处于组织液中,所以选取材质为对极性溶剂如醇、酮、酯等抵抗大的丁基橡胶材料.
为实现中环的转动,在上、下两个套筒和支架之间装有滚珠,滚珠和O型圈的摩擦会导致转矩损失.假设两者造成的转矩损失为Ms,则实际的输出转矩为
Mr=Mm-Ms=Monoηo-Ms
(5)
2 压力传感器设计
PAAS使用压力传感器来控制中环对肠道的牵引程度,为实现对肠壁受力的测量,且保证机构具有良好的密封性,本文自行研制了一种柔性肠道压力传感器.
柔性压力传感器的主要元件是压阻式传感器裸片C29 (2.7 mm×2.2 mm),其与压力介质接触的部分由纯硅制成,可在潮湿和腐蚀性介质中测量绝对压力.如图6所示,C29被绑定在一块印制电路板(PCB)上,大小为 5.8 mm×2.2 mm.封装后将其放置在环臂的弧形槽中,并在弧形槽表面涂抹密封胶,覆盖硅胶膜(0.5 mm),然后使用钛合金贴片将硅胶膜压紧在环臂上,可阻止液体沿硅胶膜和环臂的接触面进入环臂.最后,将硅凝胶注入弧形槽中使硅胶膜膨胀,直到其表面高出钛合金贴片2~3 mm,形成和肠道直接接触的柔性面.肠壁受力时,其反作用力F施加在硅胶膜上,由固化后的果冻状硅凝胶传递至C29感应面,感应压力通过桥式电路转化为电信号,并经放大电路放大后输出,即为肠壁受力大小.

图6 柔性肠压力传感器结构示意图Fig.6 Schematic diagram of flexible intestinal pressure sensor
3 PAAS体外实验
3.1 压力传感器标定测试
为确定压力传感器和受力间的关系,本文采用Fluke公司的高精度Everett压力校准系统(氮气罐、真空泵和PPC压力校准仪)对自制的压力传感器进行标定测试.将PAAS置于电热恒温水槽中,初始温度设为37 ℃(模拟人体正常温度),初始气压为90 kPa.待其达到恒温恒压条件后,记录压力传感器示数.因为温度变化对压力传感器输出精度的影响很小,几乎可以忽略不计[12],所以保持温度不变,按5 kPa的间隔逐渐增大气压,直至达到140 kPa.依次记录压力传感器在不同状态下的值,如图7所示,相应的拟合方程如表1所示.显然,传感器输出和其受力之间具有良好的线性度.

图7 压力传感器输出Fig.7 Output of pressure sensors
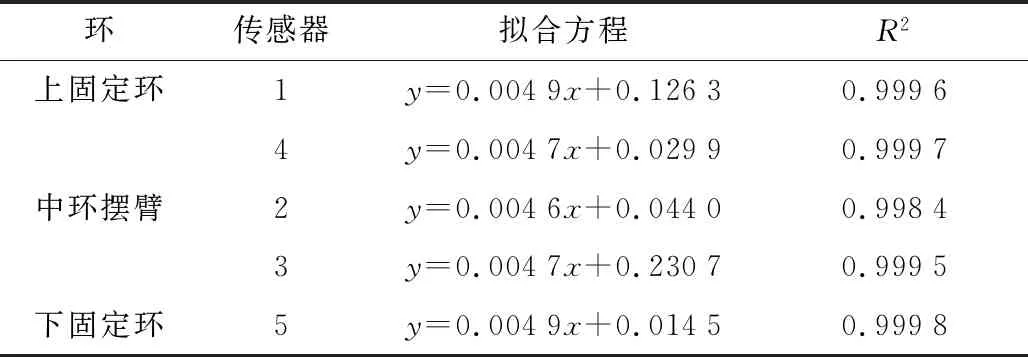
表1 传感器输出拟合方程Tab.1 Fitting equation of output
3.2 防水实验
为了检验PAAS的整体密封性能,如图8所示,将组装好的6个PAAS原型(标号为1~6)放置在80 cm水深中进行防水实验.PAAS被设置为:中环摆臂每隔20 s进行一次关闭、打开(各耗时10 s)操作,每隔 0.5 h进行一次通信测试;一次充电可以续航5 h,每次充电耗时3 h,充电期间PAAS无操作.因为电路板被封装在支架内部,如果发生渗漏,PAAS将不能继续工作或者出现通信故障.72 h之后,PAAS一切正常,结束时PAAS共计开关 4 050 次.随机拆解1号和4号机构,未发现渗漏现象,因此可以证明所设计的仿生假体具有良好的密封性能.
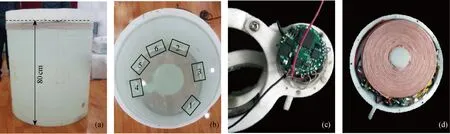
图8 防水实验 Fig.8 Waterproof experiment
3.3 力学性能测试
3.3.1转矩测定 为测定O型圈等元件造成的转矩损失Ms,对安装后PAAS的转矩进行了测定.如图9所示,将PAAS和测力计一同固定在底板上,操作中环摆臂正常关闭,测量中环施加在测力计探头上的力F′,则中环实际输出的转矩为
Mr=F′L
(6)
式中:L=45 mm为中环摆臂力臂.
每个中环套筒下有2个O型圈,上、下2个套筒共计4个O型圈.考虑到O型圈的硬度差异,每次安装O型圈后测量5次,取平均值;更换O型圈再测,共更换6次.得到F′的范围为 45.3~55.8 N,即Mr=2.04~2.51 N·m,则由O型圈造成的转矩损失Ms=1.68~2.15 N·m,即O型圈造成的效率损失为41%~51%.
3.3.2肠道夹持实验 为检验PAAS能否有效夹持肠道形成肛肠角以进行控便,采用新鲜猪直肠(直径 2.5 cm,长度40 cm,壁厚 0.3 cm)进行肠道夹持实验.PAAS工作时安装在中环径向的2号压力传感器对肠道的夹持压力最大,示数变化最明显,因此重点研究2号传感器.如图10所示,PAAS 中环摆臂顺时针旋转角度为α,夹紧肠道;之后往波纹管中注水,记录开始发生渗漏时的水柱高度H和2号传感器的示数所对应的夹持压力FP;按照 5° 的间隔增大α,直至65°,实验数据如表2所示.研究表明:人体开始产生便意时肠道内压力达到 1.185 8 kPa(H=12.1 cm),若压力上升到2.410 8 kPa(H=24.6 cm),则会产生持续便意[13-14];同时,若要保证肠道的血供安全,则最大夹持压力不能超过6 kPa[15-16].本实验结果表明,所设计的PAAS可提供 2.04~2.51 N·m的转矩,在闭合直肠后,水柱高度最大可以维持126 cm而不渗漏;当其对直肠径向的夹持(闭合)压力为6.6 kPa时,可使直肠轴向腔内压力达到9.604 kPa(H=98 cm),满足控便要求.此时,中环闭合转角为60°,闭合行程用时仅为10 s.

图9 PAAS力学性能测试Fig.9 Mechanical performance test of PAAS

表2 中环旋转角度和闭合力关系Tab.2 Relationship between rotation angle and closing ability

图10 离体肠道实验Fig.10 In-vitro rectum experiment of PAAS
3.4 动物实验
根据国际实验动物管理评估与认证协会认证实施标准《实验动物护理和使用指南》(GuidefortheCareandUseofLaboratoryAnimals),本文选用西双版纳小香猪(26.6 kg,6个月)验证PAAS植入手术可行性.基于肠道夹持实验结果,将PAAS排便阈值(2号传感器)设定为 6.5 kPa.术前,小香猪禁食24 h,麻醉后手术如图11所示.在小香猪下腹正中部位切口,游离出直肠,将括约肌假体套装在肛直肠交界处;将密封外壳覆盖在假体外表面,确认假体工作正常后,将直肠放入腹腔,关闭腹膜;将体内线圈盒埋在皮下近腹股沟位置,关腹;消毒肛门,破坏小香猪的内、外肛门括约肌,确保其失禁;缝合肛门.整个手术过程耗时65 min,无术中并发症.
术后第7天,小香猪恢复良好,顺利度过排异期.对PAAS充电后,通信正常,关闭PAAS摆臂,使其进入控便状态.根据小香猪习性,每天 14∶00~19∶00观察其排便状况.观察1周,发现前3天PAAS会正常报警,打开假体后有粪便排出;第4和第5天,PAAS未报警,打开假体,仍有粪便排出;第5天以后,PAAS出现充电异常,电量耗尽后无法进行操作.此后小香猪出现便秘,每天排便量较以往减少.数天充电尝试失败,于术后第15天,进行解剖实验,发现PAAS被组织增生包裹,形成纤维囊,摆臂无法动弹,且出现了明显肠梗阻现象,如图12所示.

图11 植入手术过程Fig.11 The implantation procedure

图12 术后解剖实验Fig.12 Animal postoperative dissection
4 结论
本文提出一种基于三环结构的仿耻骨直肠肌式人工肛门括约肌假体,模仿耻骨直肠肌动作形成肛肠角进行控便,并利用安装在环臂的压力传感器来控制假体对肠道的夹持程度,即进行排便、控便的感知.
(1)假体传动机构的整体传动效率为49%~59%,可提供2.04~2.51 N·m的转矩,最大可维持12.348 kPa(H=126 cm)的直肠腔内压力.
(2)中环摆臂在10 s内可以转角60°,此时其对肠道径向的闭合压力为6.6 kPa,水柱高度最大可在肠道内维持98 cm不渗漏,满足控便要求.
(3)自行设计的柔性肠道压力传感器具有良好线性度.
(4)采用O型圈的密封方式在经历 4 050 次开关动作后仍具有良好密封效果.
(5)假体在植入时可以有效避免肠吻合术,植入后可以有效控便、排便.
(6)组织增生和经皮供能的不稳定性是导致PAAS植入后故障的主要影响因素.
因此后续研究中,应开展进一步工作,如PAAS用材的生物安全性、相容性研究,以改进经皮能量传输设计,提高其稳定性、可靠性.
