背拉法拆除导管架过程中驳船的运动分析
2019-11-02胡振国刘雪宜徐龙达唐友刚
胡振国,陶 杰,刘雪宜,徐龙达,唐友刚,白 杰
1.海洋石油工程股份有限公司,天津 300461
2.天津大学,天津 300350
我国海上老龄导管架平台已有近百座,有的导管架平台所在区块油井已经干枯,因此需拆除这些没有存在价值的导管架平台。预计全球未来五年内将有600多个海上油气设施拆除项目,将迎来油气设施新的报废高峰期[1-2]。
目前导管架平台的拆除作业方法通常采用浮吊,即将截断的导管架平台吊装至驳船甲板,此方法需要专用起重船,或者在驳船上加装起重机[2-3],施工装备投资高,经济性较差。本文提出一种新型的导管架拆除方法即驳船背拉法拆除导管架,该方法的特点是不需要起重设备和起重船,通过布置在驳船上的滑轮及缆索系统,将导管架平台拖拉装船,该方法尚无国内外施工应用先例。本文基于驳船背拉法拆除导管架平台的方案,重点分析驳船尾部连接导管架时,驳船系统的水动力响应,计算不同海洋环境下驳船的运动和系泊系统张力,确定该拆除方案的可行性。
1 背拉法拆除导管架的作业设施
为了使驳船适应拆除平台作业,需要在驳船上安装滑轮和绞车,形成背拉导管架作业设施,主要由以下三个系统构成:提升系统(系统A)、制退系统(系统B)、旋转系统(系统C),每个系统的组成及功能如下:
(1) 系统A功能。系统A主要包括动滑轮2个、定滑轮4个、钢缆2根、绞车2部,两舷对称安装,见图1。其功能为向上提升导管架。

图1 系统A示意
(2) 系统B功能。系统B主要包括动滑轮2个、定滑轮2个、钢缆2根、绞车2部,两舷对称安装,见图2。其主要功能为控制导管架的重心位置,防止导管架突然倾倒撞击到驳船甲板;在导管架与甲板的倾斜角度很小时,通过拉紧B系统,也能在一定程度上减小导管架下落速度,防止撞击甲板。

图2 系统B示意
(3) 系统C功能。系统C主要包括定滑轮2个、钢缆2根、绞车2部,两舷对称安装,见图3。其功能为提供使导管架旋转的力,拉动导管架倾斜上船;在导管架倾斜度较小时,控制导管架下落到甲板的速度。

图3 系统C示意
2 背拉导管架作业设施的工程设计
2.1 导管架和驳船的基本参数
导管架所在海域水深20 m。在驳船尾部,通过系统A的吊点及系统C的吊点将导管架与驳船尾部连接,连接方式如图1和图3所示。在泥面以下4 m处切断桩腿,借助驳船的剩余浮力将导管架拔出。拔出后导管架高度为29.7 m(不包括上部结构),海面到顶部7.5 m,导管架质量506 t。驳船的基本参数见表1,满载吃水4.5 m,排水量为10 823.79 t。

表1 驳船的基本参数
选取的系泊缆直径48mm,破断张力为1210kN,船首和船尾各设2个系泊点,每个系泊点有两根系泊缆,系泊缆之间的夹角为5°,抛缆角分别为45°和50°。
选取的海洋环境第一工况为:流速1.0 m,风速10.0 m/s,有义波高1.0 m;第二工况为:流速1.0 m,风速10.0 m/s,有义波高1.5 m。
2.2 背拉导管架作业设施的改装
系统A:甲板上绞车距离船尾42000mm。
系统B:绞车距离船尾40 000 mm。
系统C:甲板上滑轮距离船尾36000mm,绞车距离定滑轮2 m。
在海面以上导管架桩腿上安装定滑轮4个,导管架下部提拉位置安装吊耳2个,导管架两侧对称安装;系统C和系统B与导管架连接的定滑轮安装在导管架桩腿上;在驳船上布置背拉导管架设施,在甲板上安装滑轮和绞车,见图4。
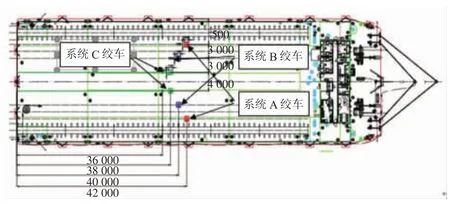
图4 绞车布置示意
3 导管架背拉过程水动力计算及运动模拟
导管架上船过程中,从提升开始离开泥面,逐步倾斜,直至最终落到甲板上,将此过程分解为如下步骤:导管架倾斜角度依次为 0°、15°、30°、45°、60°、75°,最后导管架落到甲板上。
在提拉装船过程中,导管架和驳船连接在一起,在装船过程中导管架倾斜角度不同,处理为载荷位置的变化。计算分析导管架每个倾斜状态的船舶运动、系泊张力以及背拉缆索载荷。
3.1 水动力计算模型
处于驳船连接导管架状态,驳船质量9 300 t(包括压载水),导管架质量506 t,导管架受到的浮力忽略不计,作为安全储备,驳船尾部连接导管架后的质量合计9 806 t,驳船吃水4.09 m,系泊线的布置见图5。按照上述数据基于MOSES软件计算背拉导管架过程驳船的水动力和运动。

图5 驳船系泊线及水动力模型
3.2 计算结果
计算结果如表2~5所示。

表2 1.0 m波高时不同浪向下系泊缆最大拉力
由表2~5可知,随浪向角增大,系泊缆张力和横荡运动不断增大,横荡运动是背拉法拆除过程的主要风险。有义波高1.0 m时0° ~45°浪向角可以满足作业要求,系泊张力287 kN,横荡运动1.477 m。有义波高1.5 m时0° ~30°浪向角,系泊张力444 kN,横荡运动3.0 m,横荡运动较大,施工有风险,有义波高1.5 m时不允许施工作业[4-5]。
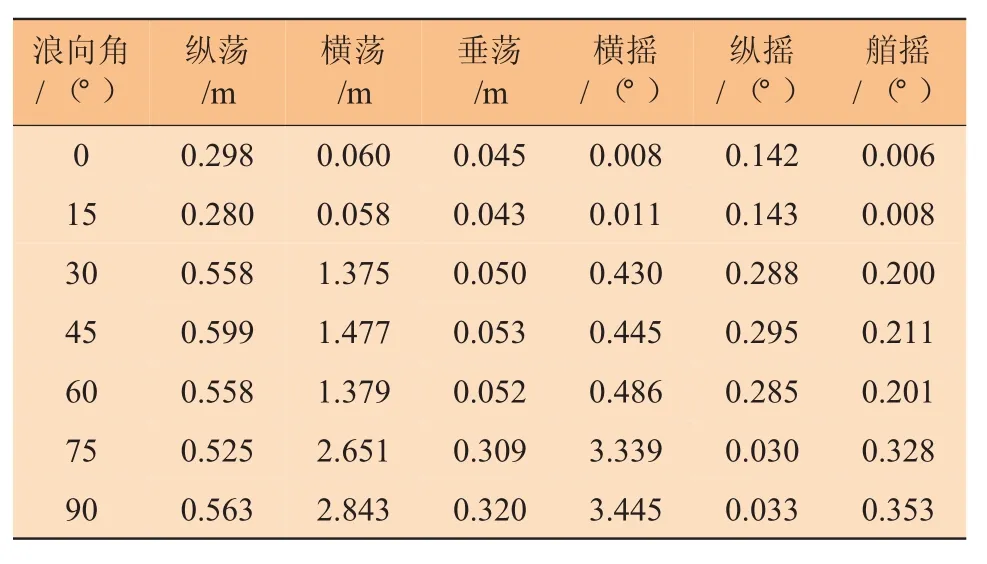
表3 1.0 m波高时不同浪向下运动幅值

表4 1.5 m波高时不同浪向下系泊缆最大拉力

表5 1.5 m波高不同浪向下运动幅值
4 结论
本文提出了驳船背拉法拆除导管架的新技术,并以拆除小型导管架为例,进行了导管架背拉过程驳船运动模拟,主要结论如下:
(1)背拉法拆除导管架作业中上船过程是该方法的关键施工步骤,此过程中驳船的运动对于施工过程安全具有重要影响。
(2)背拉法拆除导管架作业中驳船运动风险主要来自横荡和纵荡,而横荡主要与浪向角密切相关,当浪向角大于45° 时,驳船的横荡运动达到3 m,不宜进行拆除作业。
(3)控制驳船的运动采用8缆系泊是可行的,驳船的运动可以得到有效控制,为背拉施工提供稳定的作业平台。
(4)系泊缆张力主要受浪向角的影响,随浪向角增大,系泊张力不断加大。