多合一电驱动系统的结构原理及CAE仿真分析
2019-10-31范旭红杜长虹邱单丹刘太刚肖贺平
侯 磊,范旭红,杜长虹,陆 焦,邱单丹,刘太刚,肖贺平
(重庆长安新能源汽车科技有限公司,重庆 401120)
0 引 言
纯电动汽车是指以车载电源为动力,用电机驱动车轮行驶,符合道路交通安全法规各项要求的车辆。目前,电动汽车研究主要集中在电池、电驱动系统、电控系统三大核心部件及电空调、电制动、电转向等辅助系统[1-3]。其中,电驱动系统包括电机(EM)、减速器(G-BOX)、电机控制器(IPU)、DC/DC变换器(DCDC)、车载充电机(OBC)、高压配电盒(HV-BOX)、整车控制器(VCU)及压缩机(ACP)、水泵(PUMP)等外挂件。电驱动系统各组成元件的集成方式决定其能量密度,能量密度对纯电动汽车性能影响显著。因此,电驱动系统的高度集成化设计显得尤为重要[4-6]。
国内外主流车企电驱动系统有多种集成形式,包括三合一、四合一、六合一、七合一。国内上汽、广汽、比亚迪、吉利、长安等公司有三合一电驱动系统,由EM,G-BOX,IPU三部分构成;北汽、比亚迪等公司有四合一电驱动系统,由IPU,DCDC,OBC,HV-BOX四部分构成电控、电源总成,G-BOX,EM分散布置;零跑、北汽等公司有六合一电驱动系统,由EM,G-BOX,IPU,DCDC,OBC,HV-BOX六部分构成。国外大众、特斯拉、奥迪、宝马等公司有三合一电驱动系统,由EM,G-BOX,IPU构成[7];宝马公司有六合一电驱动系统,由EM,VCU,IPU,DCDC,OBC,HV-BOX六部分构成;雷诺、日产公司有七合一电驱动系统,由EM,G-BOX,IPU,DCDC,OBC,HV-BOX、ACP七部分构成。通过查阅资料及行业内相关企业交流可知,国内外电驱动系统集成度会越来越高,开发高能量密度电驱动系统是大势所趋[8-9]。在此背景下,重庆长安新能源汽车科技有限公司的一体化电驱动系统项目正式立项,旨在打造一款超高能量密度的电驱动系统,称为多合一电驱动系统。
1 结构及工作原理
1.1 结构组成
多合一电驱动系统由EM,G-BOX,IPU,DCDC,OBC,HV-BOX,VCU,ACP,PUMP共9部分组成,如图1所示。整体采用四段式结构,分别为减速器左端盖、减速器右端盖、电机定子壳体、电机后端盖,其中减速器右端盖为电机和减速器共用端盖。ACP固定在电机左端盖上,PUMP固定在电机右端盖上。IPU,DCDC,OBC,HV-BOX,VCU布置在控制器系统壳体中,DCDC,OBC布置在同一层,称之为电源层; HV-BOX和IPU,VCU布置在同一层,称之为电机控制层,电源层和电机控制层共同组成控制器系统,布置在EM正上方。该多合一电驱动系统为原有长安量产的三合一电驱动系统和电源系统的进一步集成产品,提高了能量密度和冷却效率。

图1 多合一电驱动系统三维数模
1.2 系统原理
该多合一电驱动系统的系统原理图如图2所示,主要包括高压电传输、低压电信号传输、热量交换、动力传递等,其中高压电包括高压直流电、高压交流电、家用220 V交流电;低压电信号包括12 V直流电信号、CAN信号、高压互锁信号、电子锁位置信号、制动踏板位置信号等共62个电信号。

图2 多合一电驱动系统原理简图
动力电池输出高压直流电,经过HV-BOX中叠层铜排将高压直流电分配成4部分,包括控制器系统内部IPU中的INV功率模块、DCDC模块,外部的ACP,PTC。INV功率模块将高压直流电转换成高压交流电输送到EM,驱动EM旋转;DCDC模块将高压直流电转换成低压直流电输送给12 V蓄电池,实现对12 V蓄电池进行动态充电,12 V蓄电池输出低压直流电给IPU中的INV控制模块和VCU控制模块[10]。OBC模块经过HV-BOX中叠层铜排与动力电池相连,OBC可将输入的家用220 V交流电转换成高压直流电,输入到动力电池中,此过程为动力电池慢充过程。
该电驱动系统的冷却水路、PUMP和电驱动系统外部的冷却控制系统可组成封闭的回路。PUMP为回路中冷却液循环提供动力,冷却控制系统完成回路中冷却液的热交换,对电驱动系统中EM,IPU,DCDC,OBC进行冷却[11-12]。EM和G-BOX采用机械连接,通过花键轴、花键套结构实现动力传递。
2 数值建模
2.1 模型建立
将多合一电驱动系统三维数模进行简化处理,导入到仿真软件中进行预处理,得到模型如图3所示,利用此模型进行有限元分析。

图3 预处理模型
2.2 材料属性
该多合一电驱动系统中各部件的材料不同。控制器壳体、上下盖板、电机端盖、减速器壳体及支架的材料为ADC12,定子铁心材料为硅钢,电机壳体材料为A365.0-T6,轴材料为20CrMnTi,屏蔽板材料为Q195,具体的材料属性如表1所示。
表1 材料及物理属性
3 CAE仿真分析
3.1 模态分析
在进行模态分析时,低阶固有频率对振动影响较大,无需表示出全部阶次下的固有频率,根据经验选取前八阶模态进行分析。仿真分析结果表示,一阶模态为108.2 Hz,发生在控制器系统中屏蔽板(以下简称屏蔽板)处,如图4(a)所示;二阶模态为157.1 Hz,依然发生在屏蔽板处;控制器系统的整体模态发生在第七阶,如图4(b)所示,大小为437.8 Hz;八阶模态为443.9 Hz,发生在屏蔽板处。
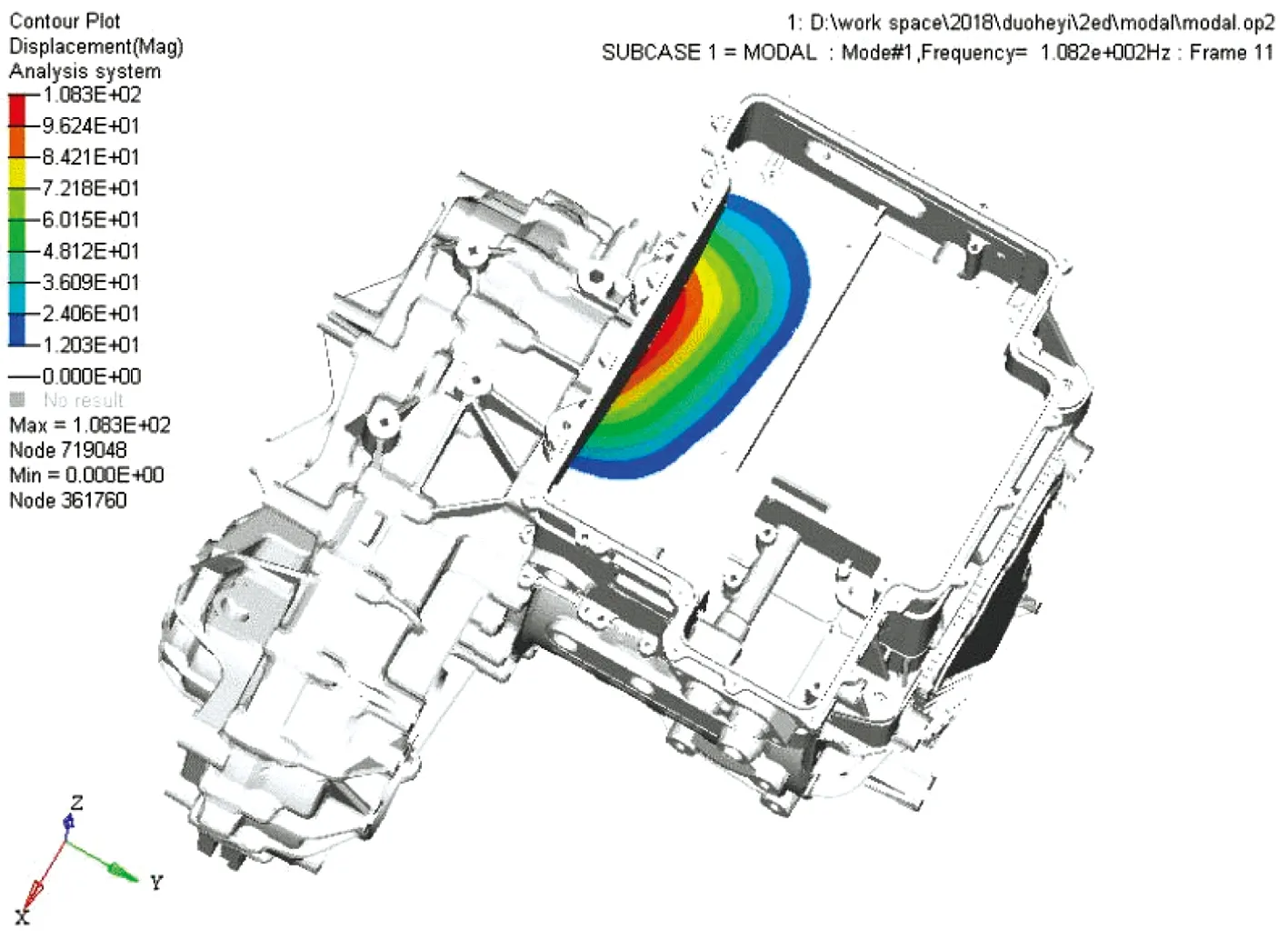
(a) 一阶模态

(b) 七阶模态
3.2 静力学分析
对多合一电驱动系统进行静力学分析,根据整车运行工况确定载荷值,将其分解到X,Y,Z三轴上,用g的倍数表示大小,具体载荷值如表2所示。

表2 静力学分析载荷值
在此工况下进行静力学分析,结果显示,屏蔽板处的最大应力较大,因此结果分析时分别表示多合一电驱动系统、屏蔽板两个部分(下同),具体结果如表3所示。

表3 静力学分析结果
由表3可知,在沿Z轴-26g载荷下,多合一电驱动系统、屏蔽板产生的最大应力最大,分别为13.704MPa和132.162MPa,如图5所示,均满足要求。

(a) 多合一电驱动系统
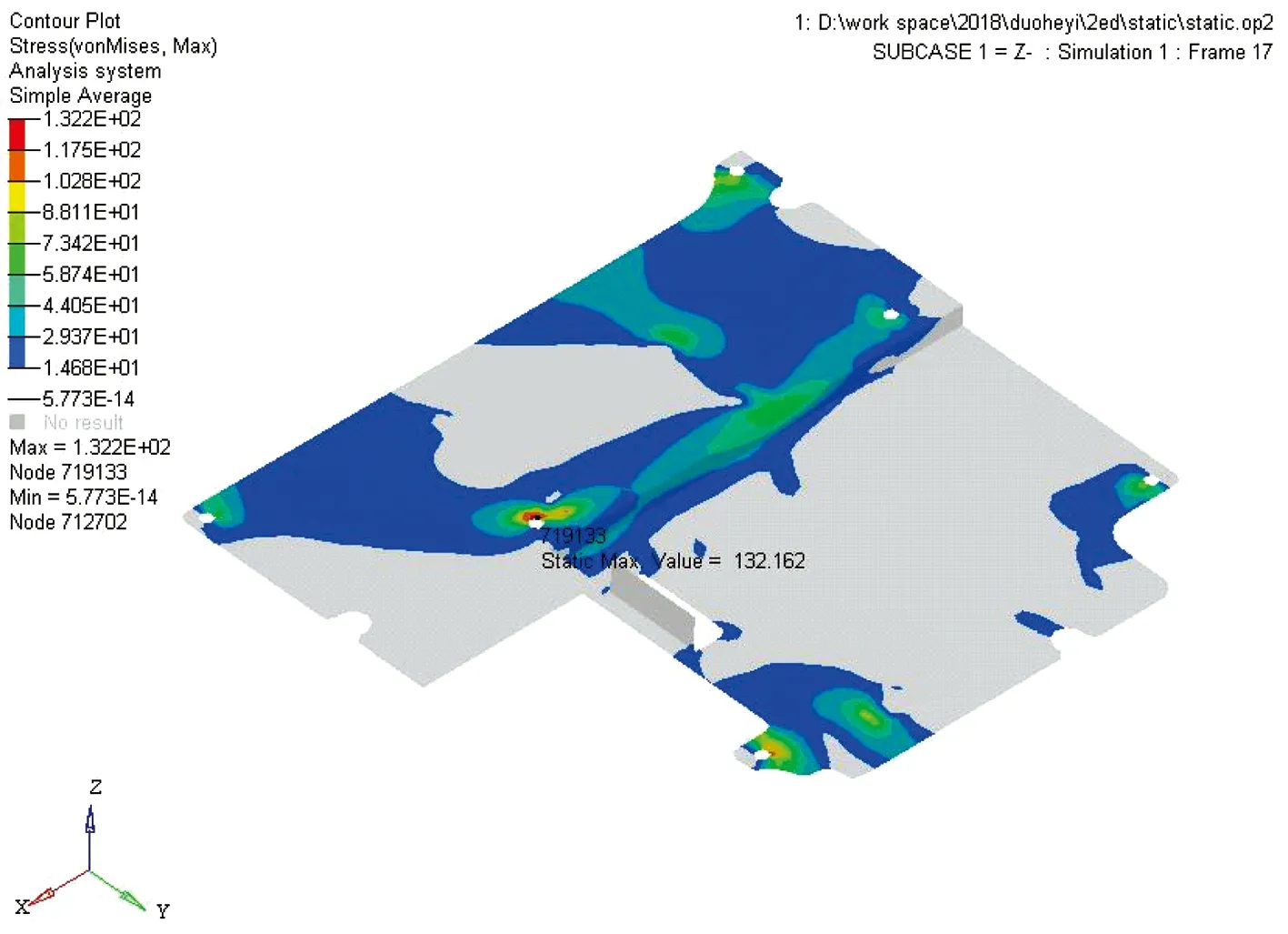
(b) 屏蔽板
3.3 扫频振动分析
对多合一电驱动系统进行扫频振动分析,输入频率、振幅、加速度3个参数,确定其中任意2个参数,即可进行求解计算。根据整车运行工况确定Z轴方向的振动工况,如表4所示,X轴方向和Y轴方向振动工况的加速度应该减半。频率25 Hz以下为低频段,不选取与之对应的加速度[13-17]。

表4 Z轴方向振动工况
经过扫频振动分析计算后,多合一电驱动系统、屏蔽板的最大应力及频率如表5所示。

表5 扫频振动分析结果
由表5可知,多合一电驱动系统的最大应力为23.440 MPa,如图6(a)所示,满足要求。屏蔽板的最大应力为254.087 MPa,如图6(b)所示,大于屏蔽板材料Q195的屈服强度195 MPa,不满足要求。
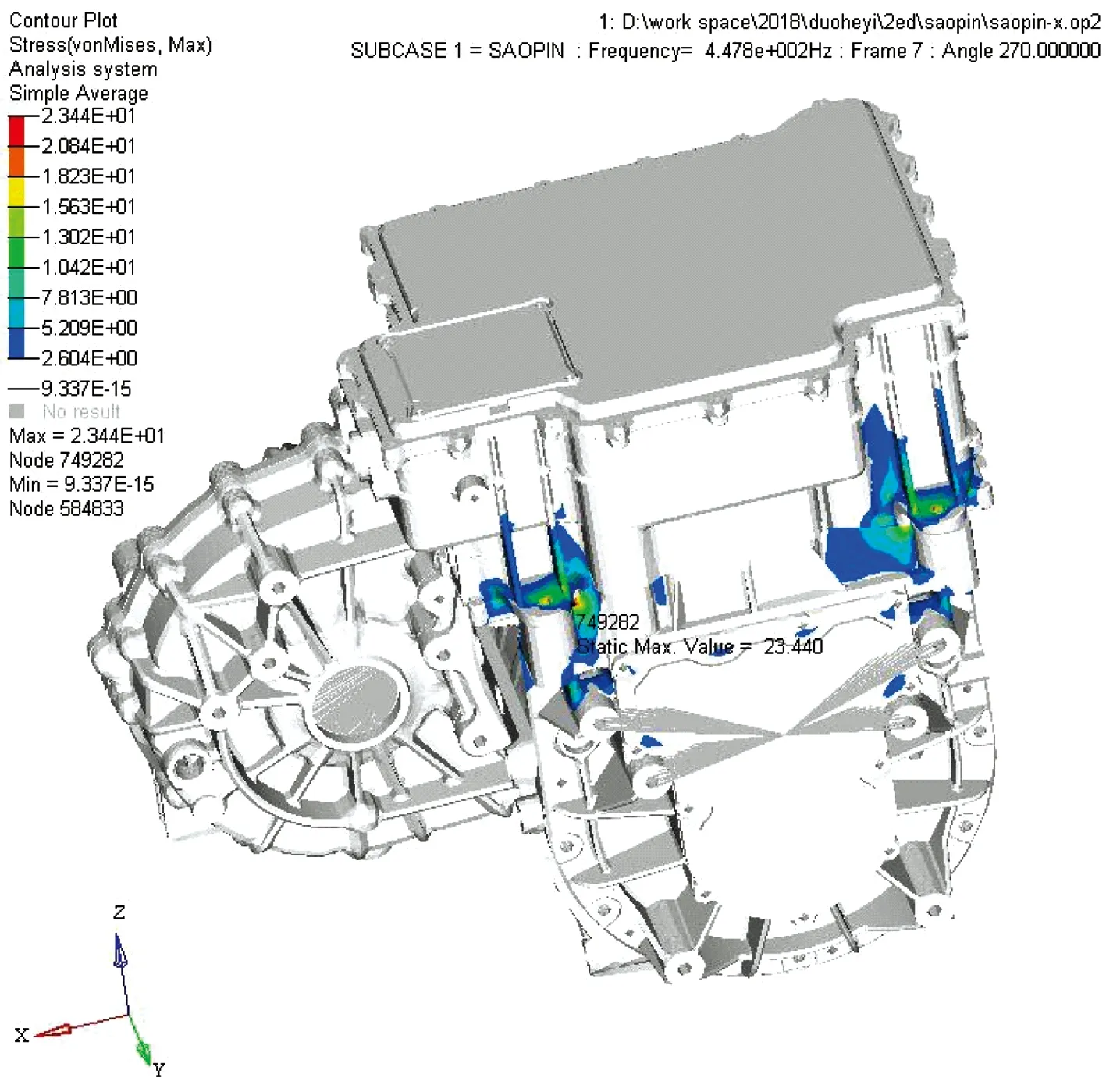
(a) 多合一电驱动系统

(b) 屏蔽板
3.4 随机振动分析
对多合一电驱动系统进行随机振动分析,输入频率和加速度谱密度(ASD)两项,根据整车运行工况选取频率分别为10Hz,100Hz,300Hz,500Hz,2 000 Hz,与之对应的ASD值分别为10 m2·s-4/Hz,10 m2·s-4/Hz,0.51 m2·s-4/Hz,5 m2·s-4/Hz,5 m2·s-4/Hz。仿真分析结果如表6所示[18-20]。

表6 随机振动分析结果
由表6可知,多合一电驱动系统最大3σ应力为68.307 MPa,如图7(a)所示,满足要求。屏蔽板最大3σ应力为268.182 MPa,如图7(b)所示,大于Q195的屈服强度195 MPa,不满足要求。

(a) 多合一电驱动系统
(b) 屏蔽板
综上所述,多合一电驱动系统(除屏蔽板外)静力学分析、扫频振动分析、随机振动分析结果均满足要求。屏蔽板静力学分析结果满足要求,扫频振动分析、随机振动分析结果不满足要求。因此,需要对屏蔽板进行改进设计,具体措施如下:
1) 增加屏蔽板安装孔个数;
2) 将屏蔽板的材料更改为Q235,Q235的屈服强度为235 MPa,抗拉强度为375~500 MPa。
4 改进后CAE仿真分析
4.1 模态分析
根据仿真分析结果及经验选取前十五阶模态进行分析。仿真分析结果表示,一阶模态为58.16 Hz,发生在屏蔽板处;二阶模态为85.42 Hz,依然发生在屏蔽板处;控制器系统的整体模态发生在第十五阶,大小为437.7 Hz,较改进前一阶模态和模态密度均降低。
4.2 静力学分析
借用上文中的载荷值作为输入并对其进行简化,取消表3中序号4、序号5表示的载荷,具体结果如表7所示。

表7 改进后静力学分析结果
由表7可知,多合一电驱动系统、屏蔽板的最大应力分别为13.704MPa和170.481MPa,均满足要求。
4.3 扫频振动分析
借用上文的表4作为输入进行仿真分析计算,具体结果如表8所示。
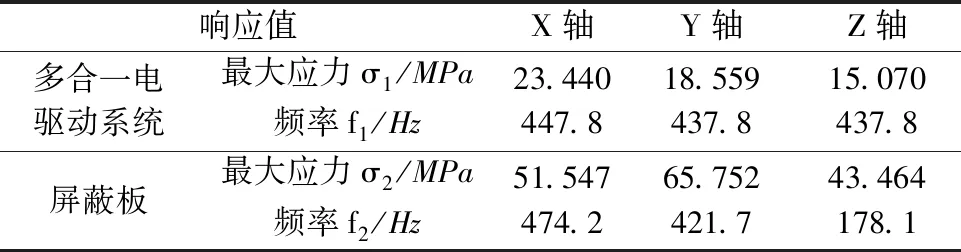
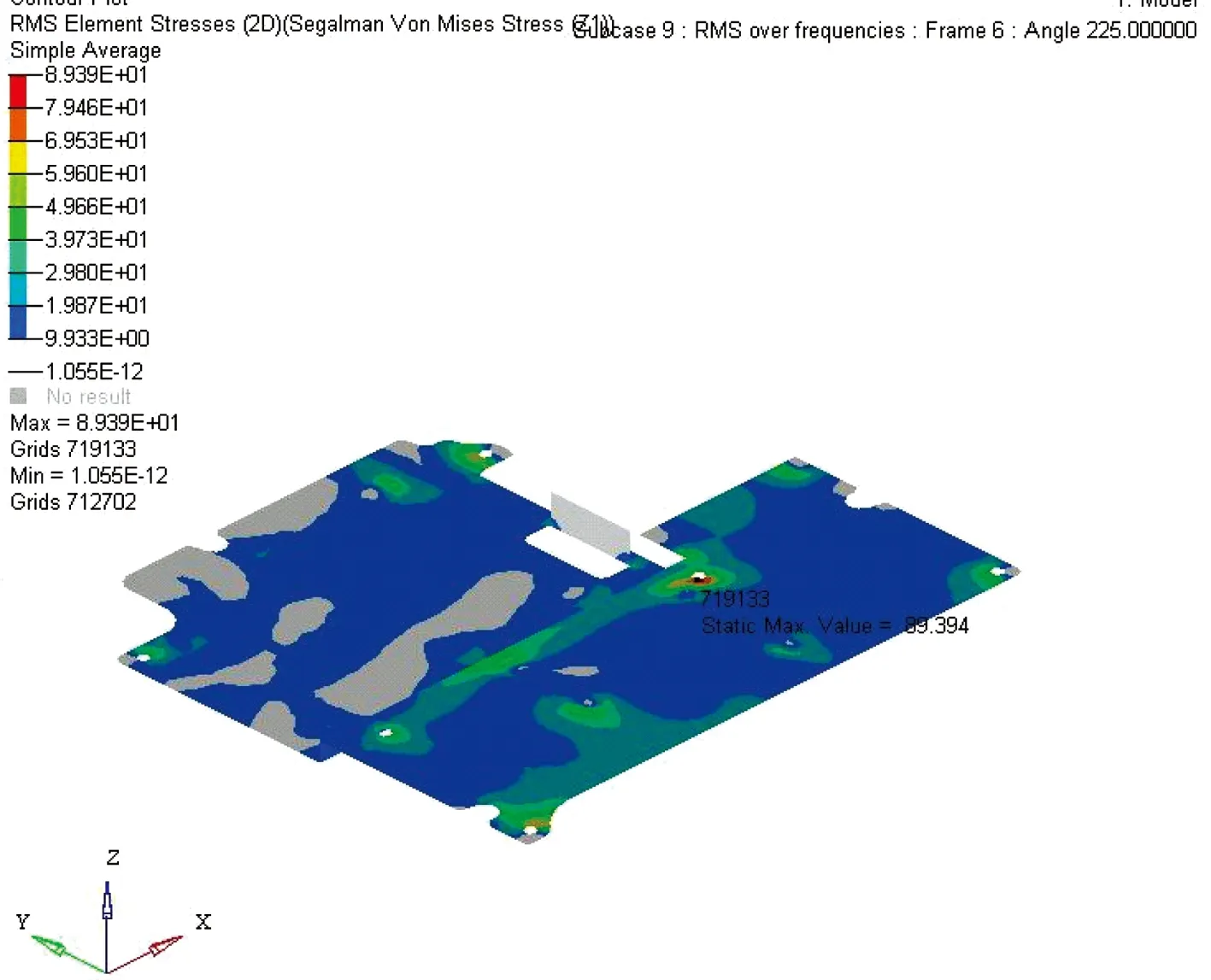
表8 改进后扫频振动分析结果
由表8可知,多合一电驱动系统、屏蔽板的最大应力分别为23.440MPa和65.752MPa,均满足要求。
4.4 随机振动分析
借用上文中的输入条件进行仿真分析计算,具体结果如表9所示。

表9 改进后随机振动分析结果
由表9可知,多合一电驱动系统、屏蔽板的最大3σ应力分别为68.307MPa和171.309MPa,均满足要求。
4.5 耐冲击分析
对多合一电驱动系统进行耐冲击分析,对其施加半正弦冲击载荷,载荷值大小分别为沿Z轴方向25g、X轴方向12.5g及Y轴方向12.5g,持续时间为6s。评价标准为最大应力是否满足σmax≤σb,仿真分析结果如表10所示。

表10 耐冲击分析结果
由表10可知,多合一电驱动系统最大应力为21.704 MPa,如图8(a)所示,满足要求。屏蔽板最大应力为173.414 MPa,如图8(b)所示,小于Q235的抗拉强度375~500 MPa,满足要求。
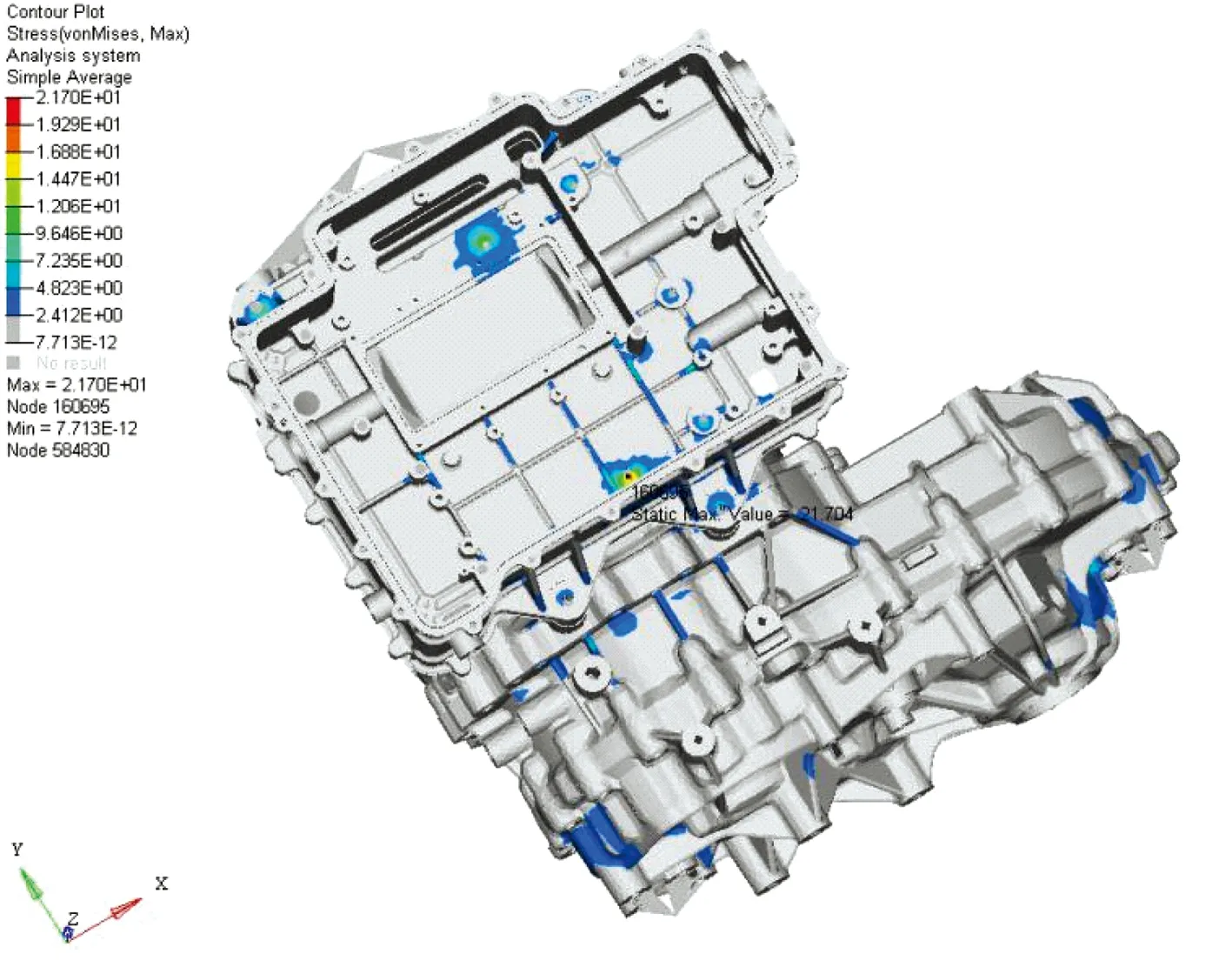
(a) 多合一电驱动系统

(b) 屏蔽板
4.6 疲劳分析
借用上文中扫频振动分析时X,Y,Z三个方向的输入条件,分别历时8 h;随机振动分析时的输入条件扩展到沿X,Y,Z三个方向各历时22 h,将所有结果叠加作为疲劳分析的最终结果。结果显示,多合一电驱动系统最大疲劳损伤值为5.279×10-4,小于标准值1,满足要求;屏蔽板最大疲劳损伤值为0.255,大于标准值0.2,根据经验对此进行评估认为风险可忽略[21-22]。
综上所述,对改进后的多合一电驱动系统依次进行模态分析、静力学分析、扫频振动分析、随机振动分析、耐冲击分析和疲劳分析,模态分析结果表明,较改进前一阶模态和模态密度均降低,其余五项分析结果均满足要求。
4.7 讨论
改进后多合一电驱动系统模态分析结果显示,一阶模态和模态密度均降低,带来的影响为屏蔽板同整车其他零部件发生共振的风险增大。针对该多合一电驱动系统模态分析结果进行评价时,在目前开发研究阶段,尚无定量的频率范围判定优劣。因此,目前不对屏蔽板再次进行结构优化,而采取在屏蔽板安装孔处增加软垫的方式减小共振风险。
5 结 语
本文设计了一款由EM,G-BOX,IPU,DCDC,OBC,HV-BOX,VCU,ACP,PUMP共9部分组成的多合一电驱动系统,该系统可实现性能的提升和成本的降低。该多合一电驱动系统及屏蔽板的静力学分析、扫频振动分析、随机振动分析、耐冲击分析、疲劳分析结果均满足要求。
