涡轮发电混合动力分布式推进系统设计分析
2019-10-28满运堃姚轩宇王爱峰中国航发研究院
■ 满运堃 姚轩宇 王爱峰 / 中国航发研究院
分布式推进系统作为一种新型航空推进技术,其系统构架、设计方法和思路均与传统模式有所区别,开展设计方法梳理及影响因素分析,有助于加深对混合动力系统设计的认识,为方案设计提供理论支持。
随着航空业的快速发展,人们对飞行器动力系统性能的要求也在不断提升。其中,涡轮发电混合动力(涡轮混电)分布式推进系统作为一种极具潜力的新型航空动力系统,成为目前的研究热点之一。
涡轮混电分布式推进系统是指通过涡轮发电系统和储能系统为飞行器提供能量,驱动分布在飞行器不同位置的多个推进器产生推力的一种新型推进系统。该系统由原动机(通常为涡轴发动机)、发电机、储能装置、电动推进单元(电动机和风扇/螺旋桨)以及能量管理、热管理、控制系统等多个部件、子系统组成。
相比于现有航空动力系统,涡轮混电分布式推进系统具有诸多优势。原动机与推进器解耦,二者可以分别在最佳工况工作,从而有效降低耗油率、提高推进效率。电动推进单元体积小巧,可与飞行器深度融合设计,从而优化整机气动性能,提高升阻比。分布式推进器更易于实现主动控制,通过产生主动控制力矩或直接产生升力,可以减少舵面等部件结构,还可使固定翼飞机的高机动飞行成为可能。诸多的优势令涡轮混电分布式推进系统在民用航空领域有着广泛的适用性,具有很好的市场应用前景。

图1 不同工况能量分配情况
设计方法及思路
动力系统的需求直接来源于飞行器,因此在开始动力系统设计前,应对飞行器开展总体初步设计分析,提炼动力系统的基本需求。通常来说,较为完整的飞行器方案设计流程至少应包含:概念设计、初步设计、详细设计、设计定型等阶段。因此,可通过概念设计和初步设计,得到飞行器的总体初步方案,给出基本尺寸和布局、主要性能参数、功率或推力需求范围、飞行包线等设计约束,作为涡轮混电分布式推进系统的设计输入。
涡轮混电分布式推进系统可简化为电推进系统、涡轮发电系统、储能系统3个部分。由于储能系统的存在,能量流动路径不是单向的,因此涉及到不同工况下的能量分配。起降阶段(特别是短距/垂直起降)需要的推进功率较大,但持续时间相对较短;巡航阶段需要的推进功率较小,但占据了绝大部分飞行时间。为达到最优设计(此处定义为在满足飞行器全飞行包线动力需求的前提下,动力系统部件及电池、燃油的总质量最小),则应尽量降低涡轮发电系统的容量并使其工作在恒定、高效的状态。故涡轮发电系统的设计应以满足巡航时的功率需求为基准,稳定输出;储能系统的设计应以满足起降阶段峰值功率下的功率缺口为基准,在不同阶段通过充放电实现动态调整。整机总功率需求与原动机、电池输出功率的关系如图1所示,该图展示了美国国家航空航天局(NASA)X-57涡轮混电分布式验证机的能量分配策略。
基于以上思路,可以采用从需求逆推的顺序开展分布式推进系统设计。第一步,针对背景飞行器开展总体初步设计,得到动力系统需求并确定推进器布局、尺寸及数量。第二步,开展电推进系统设计,利用各部件的参数化设计模型,选取合理的设计参数并计算,依次完成螺旋桨参数化设计、动力分配优化、电动机设计,得到相应部件的设计结果以及不同飞行工况下的功率需求。第三步,开展涡轮发电系统设计,以巡航状态功率需求为基准,完成原动机、发电机参数化设计。第四步,开展储能系统设计,根据飞行包线以及不同飞行工况下的功率缺口或盈余,完成电池设计。第五步对形成的总体初步方案迭代优化。基本设计流程如图2所示。
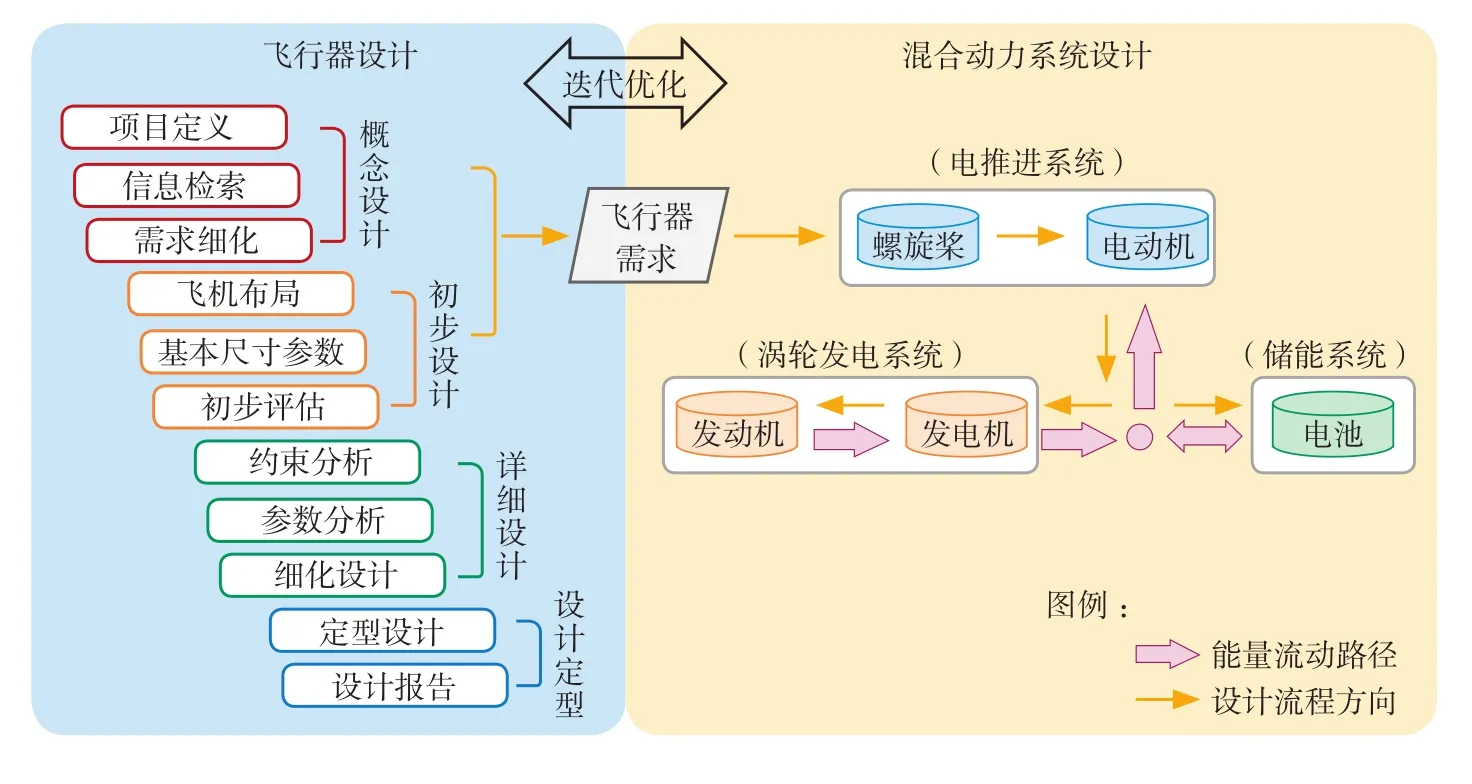
图2 基本设计流程
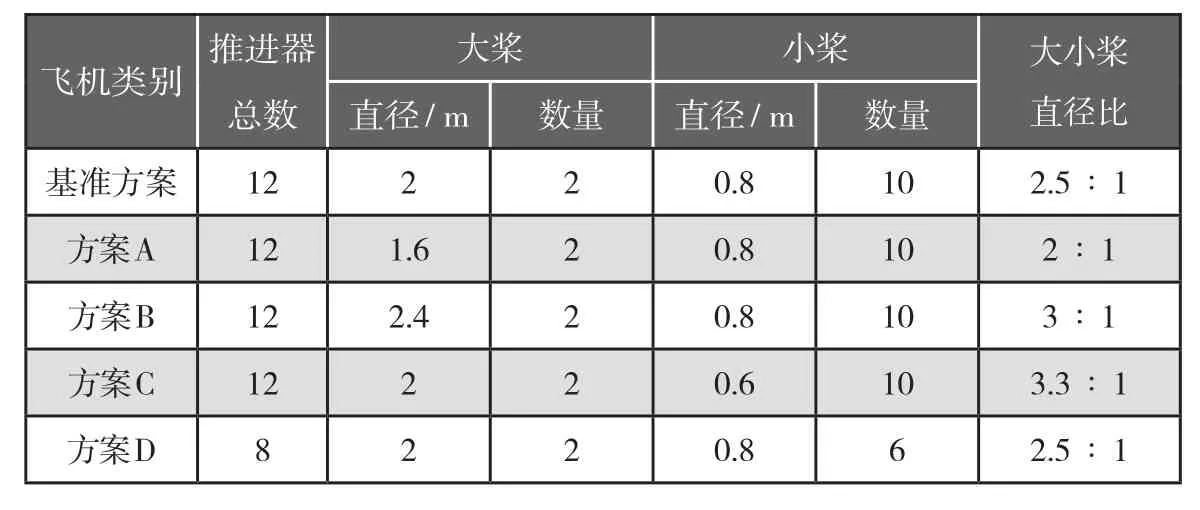
表1 一种基准布局方案以及4种对比方案

图3 推进器布局方案示意
一种基于小型通用航空飞行器的混合动力系统方案设计
本文的背景飞行器假定为一种具备短距/垂直起降能力的小型通用航空飞行器,其构型参考了罗罗公司的eVTOL概念飞行器以及NASA根据泰克南P2006T飞机改装的X-57验证机。将倾转机翼/尾翼与分布式推进相结合并应用于小型通用航空飞行器,可兼具旋翼和固定翼的特点,实现有限空间短距/垂直起降以及高效率平飞巡航,更加适合城际之间的中短程飞行。根据背景飞行器的定位,给出主要的设计目标为1.5t级小型通用航空飞机、可搭载4名乘员及行李、可完成城际间的中短程飞行、可实现垂直起飞/降落且具有不低于同类型飞机的燃油经济性。
为满足垂直起降及平飞巡航的动力需求,采用“大桨+小桨”的布局(类似于X-57)。大桨在地面低速状态具有较高的力效(拉力/功率),可有效降低垂直起飞阶段的桨盘功率需求;小桨在高空高速状态具有较高的推进效率。为研究不同推进器布局(螺旋桨尺寸、数量)对动力系统设计结果的影响,此处给出了一种基准布局方案以及4种对比方案,如表1和图3所示。
此处采用串联式混合动力系统构架,以小型涡轴发动机作为原动机,与发电机共同组成涡轮发电系统,并与储能系统共同驱动分布在机翼和尾翼前缘的若干电推进单元。设计方案中配备有能量综合管理系统,负责电能的调度与分配:当涡轮发电系统的输出功率大于整机需求时,储能系统处于充电状态,实现能量回收;当涡轮发电系统的输出功率小于整机需求时,储能系统处于放电状态,填补功率缺口。
以飞行器性能指标及相关设定作为设计输入和设计约束,选取合理的部件性能参数,开展混合动力系统参数化设计并得出结果。基准方案中,整机峰值功率(垂直起飞状态)需求为546kW,巡航功率需求为104kW;涡轮发动机额定功率为199kW;动力系统理论最大功率为580kW,各部件总质量为291kg(占比19.4%);电池最大功率为465kW,质量为194kg(占比12.9%);燃油质量为171kg(占比11.4%)。根据不同工况动力分配优化结果,基准方案下,垂直起飞阶段大桨拉力占比接近80%,说明起飞状态处于设计点的高效率大桨可有效降低功率消耗;巡航阶段大桨拉力占比为零,由小桨输出全部拉力,说明此时低效率的大桨完全成为负担,关闭大桨电动机成为最优的选择。需要指出的是,关闭后的大桨处于风车状态,会产生一定阻力,而该阻力会计入整机阻力中,将在整机升阻比中有体现,可在飞行器初步设计以及气动性能计算时一并考虑。
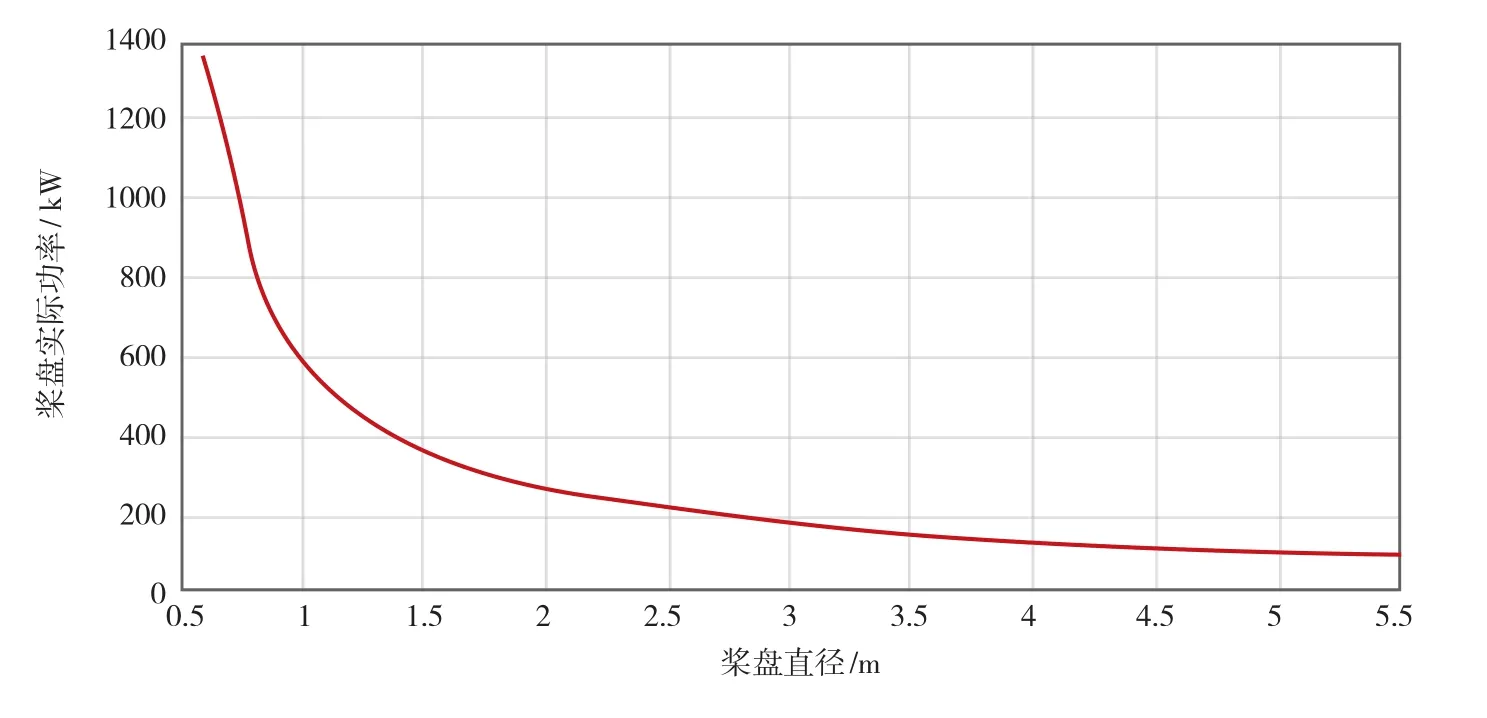
图4 螺旋桨直径与桨盘功率的关系

图5 螺旋桨数量与总功率的关系
影响因素分析
螺旋桨布局的影响
相比于基准方案,增加大桨的直径可以显著降低峰值功率,减小储能系统质量,反之则会使功率需求大幅增加。这是由于较大尺寸的螺旋桨具有更高的力效,可有效降低整机峰值功率需求,从而减小功率缺口、降低储能系统容量,使得动力系统、储能系统质量减轻。在相同拉力需求的前提下,螺旋桨直径与桨盘功率的关系如图4所示。由图4可知,桨盘功率随着直径的增加呈指数级下降,当螺旋桨直径增大至一定范围后,曲线变化方趋于缓和。可见对方案设计而言,桨直径是一个较为敏感的影响参数。
相比于基准方案,改变分布式小桨的数量对于方案设计结果的影响十分有限,各方案均较为接近,无显著差异。这是由于电推进系统的特点所致,即在电动机技术水平等前提条件不变的情况下,电推进器数量对总功率需求无明显影响。在总拉力不变以及螺旋桨性能参数不变的前提下,螺旋桨数量与桨盘总功率的关系如图5所示。当螺旋桨数量增加至一定范围后,桨盘总功率需求趋于稳定。需要特别说明的是,由于螺旋桨拉力与功率并非严格的线性关系,故当螺旋桨数量较少时,单个桨盘的负载较大,功率需求增长较快,即图中曲线左侧部分出现明显上扬,呈非线性变化。当螺旋桨数量增加至一定程度后(例如图中桨数大于8个),曲线变化方趋于稳定。可见对方案设计而言,仅从动力系统需求上看,螺旋桨数量成为一个不敏感的影响参数。
储能系统容量的影响
由以上分析可以看出,储能系统容量对方案设计结果具有较大的、直接的影响。此处以电池质量为优化参数,取消飞行器总质量的限制,分析电池对方案设计的影响。
飞行过程中能量分配策略为巡航时以混动模式为电池充电,充满后切换为纯电模式,当电池剩余电量达到应急储备电量时再切换为混动模式,以此交替。通过增加电池质量,巡航时间与飞行器总质量的关系如图6所示。
由图6可知,随着飞行器总质量增加,巡航时间亦随之增大,但这一趋势随着总质量的增大而逐渐放缓。尽管增加电池容量可以提高续航能力,但是电池在充电过程中质量是固定的,不像燃料在飞行过程中会逐步消耗,随着电池质量占比的增大,动力系统负担快速增加,能量消耗速率增大,最终“能量供需”趋于平衡。可见通过增加电池质量来提高航时的办法会随着电池质量的增加越来越困难。
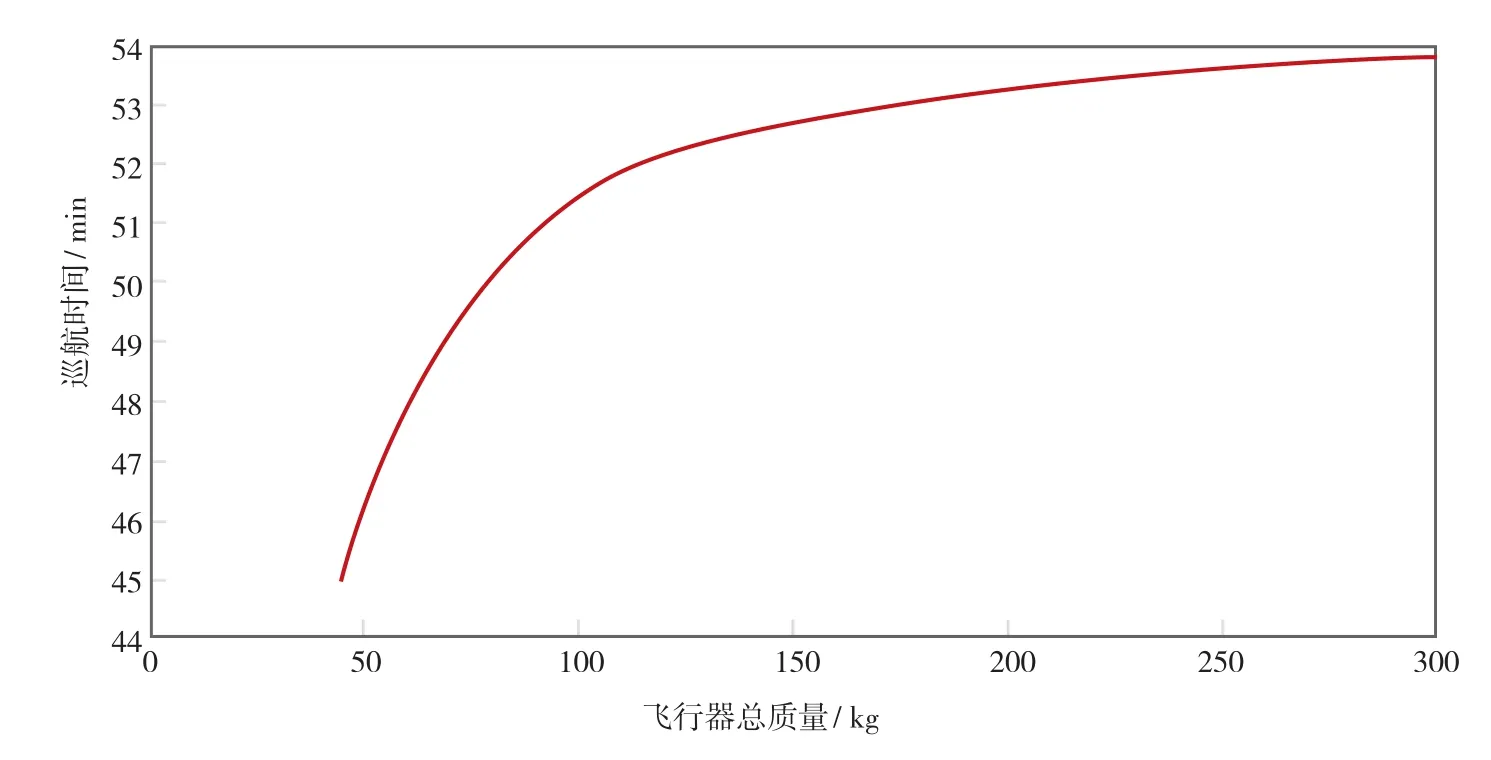
图6 巡航时间与飞行器总质量的关系
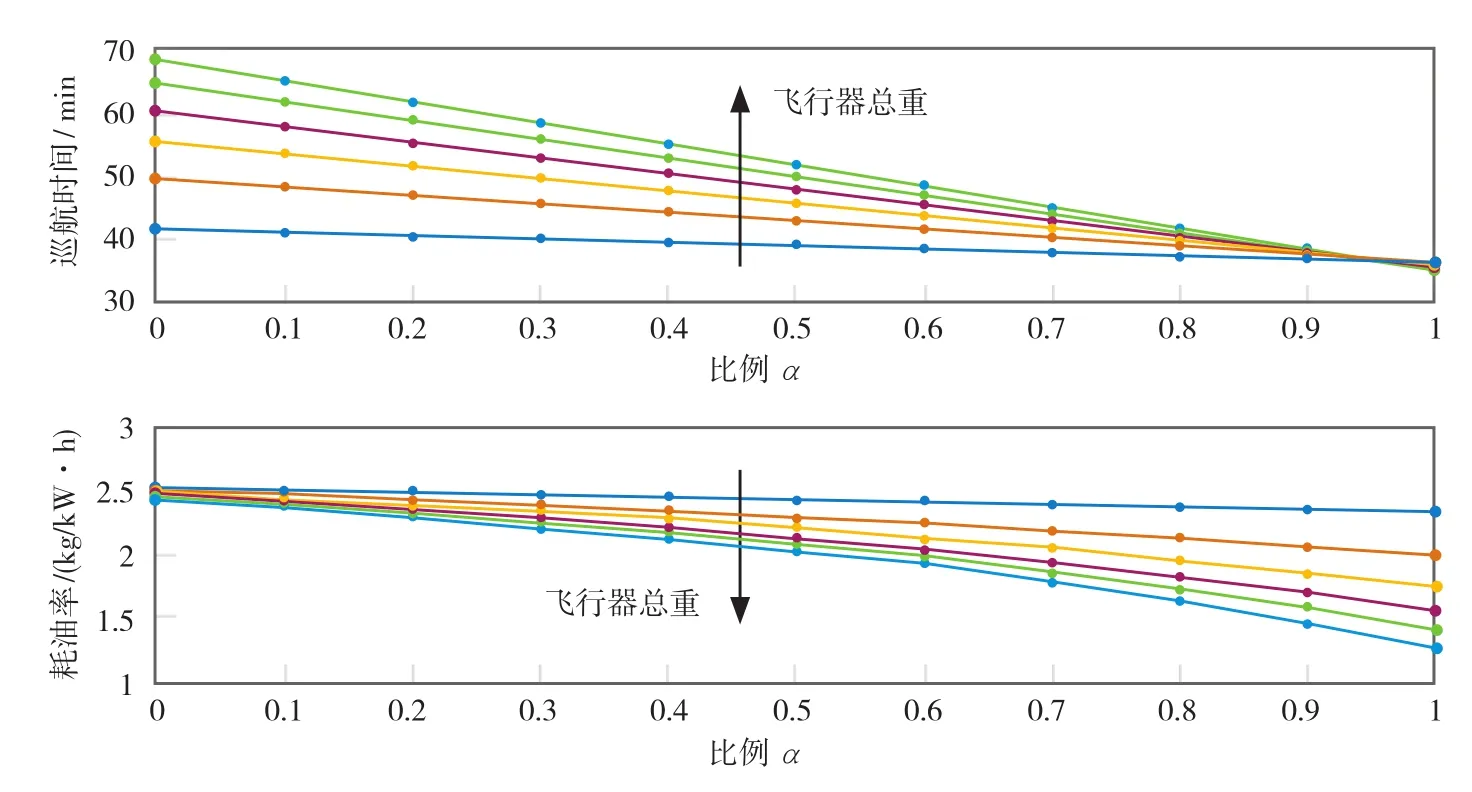
图7 油电配比与巡航时间(上)、耗油率(下)的关系
油电配比的影响
对于推进系统的设计而言,飞行器性能指标是确定的,不能无限增加电池质量或飞行器总质量。故需要在给定的质量限制范围内,综合考虑燃油和电池对于推进系统性能的影响。
在不同飞行器质量设计目标下,给定设计载荷质量占比,将剩余的质量裕度按照比例分配给电池和载重燃油。设该比例为α,α=0表示将剩余的质量裕度全部分配给燃油,α=1代表将剩余的质量裕度全部分配给电池。分析结果如图7所示。
由图7可知,飞行器总质量增大和巡航时间增加,主要受益于推进系统能够携带更多的能源执行飞行任务。而由于电驱动系统的加入,油耗也呈现下降的趋势。但在飞行器总质量保持一定的条件下,续航时间会随着电池质量的逐渐增加而下降。这表明随着飞行器设计质量的增加,能源系统(无论是燃油还是电池)的设计裕度也会增加,更多的燃油会明显增加飞行器的续航时间,而更多的电池电量会降低推进系统的油耗,提高经济性。
结束语
涡轮混电分布式推进系统作为一种新型动力系统,构架组成与传统的航空动力系统有着显著差异,导致其设计流程、方法和思路均与传统设计有所不同。在混合动力系统中,由于能量来源不是唯一的、能量流动路径非单向等特点,必须构建以能量综合管理为中心的设计方法,充分基于动力需求、全飞行包线要求,开展储能系统与燃油发电系统的协调设计及全局优化。而分布式推进布局则引入了更多的参数变量,使方案设计更加多元、自由,同时也带来了对布局方案进行优化等新问题。综合来看,混合动力分布式系统特别适用于峰值功率与巡航功率间存在一定功率缺口的使用场景。应根据任务特点,灵活调整推进器尺寸布局、优化燃油与电池的配比,从而实现更强的续航/负载能力或更好的燃油经济性。
