火箭拖拽布撒网系统建模与动力学分析
2019-10-24韩峰周峤陈放
韩峰, 周峤, 陈放
(北京理工大学 爆炸科学与技术国家重点实验室, 北京 100081)
0 引言
火箭拖拽布撒网系统由小型固体火箭拖拽,布撒网起始位置为挂网箱体,火箭点火后牵拉后续网块,经过拖网飞行过程,布撒网最终布设到目标区域中。此系统的飞行—布设过程兼具火箭的刚体运动特性及网体的柔性特征,对于这两部分的动力学建模是研究系统动力学特性的关键。
目前,国内外针对火箭拖拽武器系统的研究较为有限。Frank等[1]提出了利用火箭拖拽系统扫雷的思想,阐述了装甲车牵引网状聚能装药阵列的雷区清扫装备设计方案,并分析了系统各部分的作用机理,但并未研究系统飞行动力学行为。韩峰等[2]考虑了火箭拖拽布撒网系统在二维情况下的纵向展开过程,采用Kane方法建立了二维多刚体模型,完成了数值模拟与试验研究,为此类系统的动力学方程及外弹道布设过程研究打下了基础;但文献[2]将网带离散为二维刚性杆,未考虑布撒网的柔性运动。Williams等[3]研究了飞机拖拽下缆绳的动力学特性,并利用集中质量法建立了缆绳模型,对比了不同机型拖拽作用下缆绳动力学特性。近年来,集中质量建模方法成为研究柔性网块动力学特性的热点方向。陈钦等[4]利用质点- 弹簧模型,建立了空间绳网捕获系统的刚- 柔混合动力学模型。Provot[5]依据网带织物的材料特性,建立了柔性网块的质子- 弹簧动力学模型,并给出了网上的近似空气动力系数。Mankala等[6]建立了绳系卫星系统中子星牵引绳索的连续体模型,并利用MATLAB软件的常微分方程(ODE)求解器对系统动力学行为进行了分析。此后,其他学者[7-10]继续运用并发展集中质量建模思想,主要思路是将其研究对象中的柔性绳网离散为有限个质点,以无质量连杆代替质点间的绳段,构成模拟绳索运动的多体系统模型。在求解动力学方程时,文献[7-10]应用4阶Runge-Kutta法对仿真结果的速度失真问题进行了修正,不断缩小计算误差,得到了精度更高的网块质点位置及速度历程。Takagi等[11]基于质点- 弹簧模型,建立了一套网体外形构造和载荷分析(NaLA)系统,研究了刺网在海流作用下的外形变化和载荷特性。高庆玉等[12]采用有限绳段方法对4点、6点两种牵拉模式下的飞网系统进行了建模仿真,研究了飞网牵拉模式对系统展开性能的影响。随后,高庆玉等[13]继续运用小弹性模量分析方法对空间飞网构型设计问题进行了研究,优化了绳网中内力分布的均衡性。
火箭拖拽布撒网系统在布设过程中的动力学行为较为复杂,兼具火箭的刚体摆动运动特征及布撒网带的柔性振动特性。本文为研究其空中飞行的动力学特性,首先在韩峰等[2]研究基础上,运用改进集中质量建模原理,并与弹箭外弹道学相结合,分别对火箭及布撒网块进行建模,建立了该多体系统动力学方程,并采用4阶Runge-Kutta法进行数值求解计算;其次提出了系统的试验样机,完成了系统的外场飞行试验。最后通过仿真结果与试验数据的对比,验证了本文提出的集中质量模型的准确性,并进一步与文献[2]中的多刚体模型进行比较,阐述了本文模型的改进之处。
1 火箭拖拽布撒网系统动力学建模
1.1 火箭拖拽布撒网系统综述
火箭拖拽布撒网是一套大型雷区清障武器系统,其结构较为复杂,组成部件繁多。火箭拖拽布撒网系统的结构示意简图如图1所示。

图1 火箭拖拽布撒网系统结构示意简图Fig.1 Rocket towed net system
火箭拖拽布撒网系统中的布撒网块部分为最终布设对象。布撒网总长30.8 m,由6块单元网组成,每块单元网由4根纵向织带和24根横向织带装配而成,且每个节点上均装配有效载荷、用于清障。网块之间由7根刚性横向杆连接。其余部分中,连接火箭与布撒网的牵拉钢索长3 m,用于缓冲及调整布撒网布设姿态的回拉绳长6 m.
火箭拖拽布撒网系统完整飞行布设过程主要分为如下4个阶段:
1) 火箭自发射点火至牵拉钢索完全拉直;
2) 布撒网开始受力被拉出至火箭停止工作;
3) 整个系统在惯性作用下的飞行过程;
4) 回拉主索开始作用,布撒网系统在其作用下逐渐减速,最终在目标区域完成布设。
1.2 拖网火箭刚体动力学模型
对火箭拖拽布撒网系统中的拖网火箭进行建模。将拖网火箭视为刚体,首先提出如下假设:
1) 火箭推力始终沿轴线方向,不考虑推力偏心效应;
2) 忽略火箭发动机设计时的非对称细节,认为其质心位于几何中心;
3) 火箭旋转稳定行为对整体系统的布设过程影响甚微,忽略火箭刚体的绕轴自旋转;
4) 相对火箭总质量,其推进剂质量占比较低,忽略火箭在布撒网系统工作过程中的质量变化。
1.2.1 外弹道坐标系统
采用包括地面坐标系Oxyz、基准坐标系cxcyczc、弹轴坐标系cξηζ和弹道坐标系cxryrzr在内的外弹道学常用坐标系统[14-15]对火箭运动进行描述。本文建立的外弹道坐标系统如图2所示。
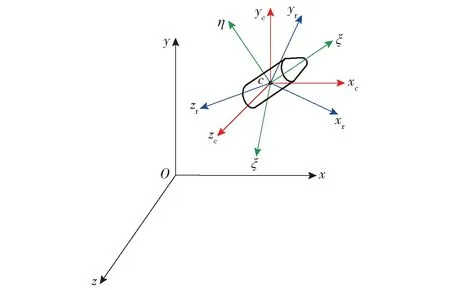
图2 火箭外弹道坐标系统Fig.2 Coordinate systems of exterior ballistics of rocket
令φ1、φ2分别为弹轴坐标系与基准坐标系之间的方位角;θr、ψr分别为弹道坐标系与基准坐标系之间的方位角;δr1、δr2分别为弹道坐标系与弹轴坐标系之间的方位角。各坐标系之间的转换矩阵Aφ1φ2、Aθrψr和Aδr1δr2可由经典外弹道理论推导而得[14]。
进行坐标转换前,需得到各坐标系相对方位角的转换关系((1)式~(3)式):
(1)
(2)
式中:vy、vz分别为火箭质心速度v沿基准坐标系y轴、z轴的2个分量;wz为风阻沿基准坐标系的z轴分量;
(3)
δr为火箭攻角;同时,为便于推导与书写,(3)式中定义了以δr1、δr2、δr表示的中间角υr.
火箭自点火发射至拉出布撒网,再到停火后自由飞行落地,整个外弹道过程受力情况复杂(见图3)。火箭质心位置受火箭推力F、牵拉钢索拉力Tw、空气阻力Rd、气流升力Rl及重力Gr的综合影响,火箭姿态受到空气阻力静力矩Ma及牵拉钢索力矩Mw的扰动。

图3 火箭受力分析Fig.3 Dynamical analysis of rocket
下面逐一推导上述外力及力矩的表达式及坐标转换关系。
1.2.2 空气动力
本系统选用的火箭发动机属于无尾翼的旋成体弹箭。在攻角平面内,火箭受到的总空气动力R可以分解为空气阻力Rd与气流升力Rl. 两类空气动力的数值为
(4)
式中:ρ为空气密度,ρ=1.293 kg/m3;Sm为火箭迎风面积;Cd、Cl分别为弹体阻力系数和弹体升力系数。
转换至基准坐标系,得到气动力矢量为
(5)

(6)
若忽略火箭飞行中的攻角,则弹道与弹轴坐标系重合,此时气流升力不存在,空气阻力矢量在基准坐标系下可表达为
(7)
1.2.3 火箭推力
根据前文假设,火箭推力始终沿轴线方向,设mp、Is、ta分别为推进剂质量、发动机比冲以及工作时间,可得火箭推力大小:
(8)
(8)式转换至基准坐标系,得
(9)
1.2.4 牵拉钢索拉力
牵拉钢索与火箭尾端连接,在本系统工况下可视为线弹性材料。由胡克定律可得牵拉钢索拉力大小Tw为
(10)
式中:ΔLw为钢索伸长量;Lw为钢索原长;Ew为弹性模量;Aw为钢索横截面积。
(10)式转换至基准坐标系,得
(11)
式中:(x1,y1,z1)为火箭尾端与牵拉钢索连接点;(x2,y2,z2)为钢索与布撒网前端连接点;(x1,y1,z1)和(x2,y2,z2)分别为钢索两端点的位置;两点之间的距离即为牵拉钢索实时长度lw.
1.2.5 重力
根据前文假设,火箭质量m不变,取重力加速度g=9.8 m/s2,火箭所受重力在基准坐标系中可表示为
(12)
1.2.6 气动力矩
火箭压心与质心的位置差异形成了扰动弹体姿态的气动力矩。经典弹箭外弹道学理论在分析气动力矩时,一般通过弹体阻力系数求得气动力的分量Rd、Rl后,将气动力作用点移至弹体质心,并添加空气阻力静力矩Ma,用来表述气动力对弹体姿态的扰动:
Ma=Rdhsinδr+Rlhcosδr,
(13)
式中:h为0.1倍弹长[16]。从而有空气阻力静力矩Ma在弹轴坐标系下的表达式为
(14)
(3)式代入(14)式,得
(15)
1.2.7 牵拉钢索力矩
牵拉钢索拉力Tw同样产生力矩,将(11)式中的Tw,cxyz转换至弹轴坐标系表达[17]:
(16)
牵拉钢索力矩在弹轴坐标系下的表达式为
(17)
式中:MTwζ、MTwη、MTwξ为牵拉钢索拉力Tw在弹轴坐标系下的分量对火箭质心的力矩;L0为牵拉钢索拉力Tw对火箭质心的作用力臂,即火箭尾端的牵拉钢索连接点(x1,y1,z1)与火箭质心的距离。
推导得到火箭所受外力及力矩后,其质心运动方程为
ma=F+Rd+Rl+Tw+Gr.
(18)
(18)式在地面坐标系中可表示为
(19)
火箭绕质心的转动可用动量矩定理描述,火箭转动方程[14]为
(20)
式中:G为火箭对质心的动量矩;ω为火箭角速度;M为作用于火箭的合外力对其质心的合力矩,即气动力矩Ma和牵拉钢索力矩Mw的合矢量。
角速度ω为弹轴方位角的变化率:
(21)
其在弹轴坐标系的表述为
(22)
火箭刚体在弹轴坐标系下的角动量为
(23)
式中:Gζ、Gη、Gξ分别为火箭对质心的动量矩G在ζ、η、ξ轴上的分量;J为火箭以弹轴坐标系为基的惯性张量;ωζ、ωη、ωξ分别为火箭角速度ω在ζ、η、ξ轴上的分量;Jζ、Jη、Jξ分别为惯性张量J在ζ、η、ξ轴上的分量,Jζ为极转动惯量,Jη、Jξ为赤道转动惯量,Jη=Jξ.
由此可以看到,由于前文假设中忽略了火箭自旋对系统布设过程的影响,火箭极转动惯量Jζ=0,(23)式可写为
(24)
对矩阵G取时间t的1阶偏导数,得到
(25)
则
(26)
(25)式、(26)式代入(20)式,得到火箭转动方程为
(27)
通过上述推导与分析得到了火箭拖拽布撒网系统中火箭发动机部分的动力学方程,分别为描述火箭位置变化的质心运动方程(19)式及表述火箭姿态变化的转动方程(27)式。
1.3 布撒网集中质量模型
近年来,集中质量建模方法一直是绳网动力学研究领域的热点方向。与传统有限段方法相比,集中质量方法建模后的多体系统总自由度下降。由于将绳网单元的内力假设为作动单元施加在系统的外力,建立动力学方程时不用考虑单元的惯性张量,方程质量阵的非线性程度大幅度降低,模型的数值性能显著提升。作动单元等效后的力元方向总是沿着相邻质点的方向,与有限段方法相比,采用集中质量模型依旧能得到理想的计算结果。该方法的核心思想是将绳网系统的质量均匀离散至特征点上,利用离散质点的广义坐标变化矩阵描述原连续体系统的动力学行为。对于网目系统,特征点通常与网目节点重合。在建立动力学方程时,通常通过分析目标系统的结构特性,建立随体坐标系,分析各特征点坐标间的相对位置关系,最后得到独立方程组。
在将系统质量离散到质点后,自然要考虑相邻质点间的位置约束,处理两点间约束的方法也在不断发展。等距约束法[2-3]首先被提出,该方法视两点间存在无质量刚性连杆,认为特征点之间不存在相互移动。随后,考虑到绳网柔性动力学行为,国内外学者相继提出质点- 弹簧模型[4-5]对集中质量方法进行改进,在仿真中进一步表征了绳网张力。
1.3.1 考虑能量耗散的网带集中质量模型
在对火箭拖拽布撒网系统中的布撒网部分进行力学建模时,不仅要表征网带张力,而且考虑到本文所选用的织带材料以及网带双面缝制的结构属性,还要求模型能体现飞行过程中网带材料内摩擦造成的结构阻尼与能量耗散。
本节在质点- 弹簧模型的研究基础上进一步做出改进,将网带质量均匀集中到网目节点上后,集中质点记为eij,即第i(i=1,2,3,4)条纵向带与第j(j=1,2,…,144)条横向带连接处的网目节点,将相邻两节点之间的柔性部分描述为弹簧- 阻尼器作动单元。布撒网集中质量模型如图4所示。
弹簧- 阻尼器作动单元实际上是作用于相邻两质点之间的无质量力元,相对于弹簧- 质点模型描述的线弹性力元,更能体现网带的介质阻尼。当两点距离小于网带原长时,作动器不施加作用力,体现网带的柔性松弛特性;当两点距离大于原长时,由弹簧作动器表征网带张力,阻尼作动器表征结构阻尼和能量耗散,且假定阻尼力正比于相邻质点间的速度差[18]。
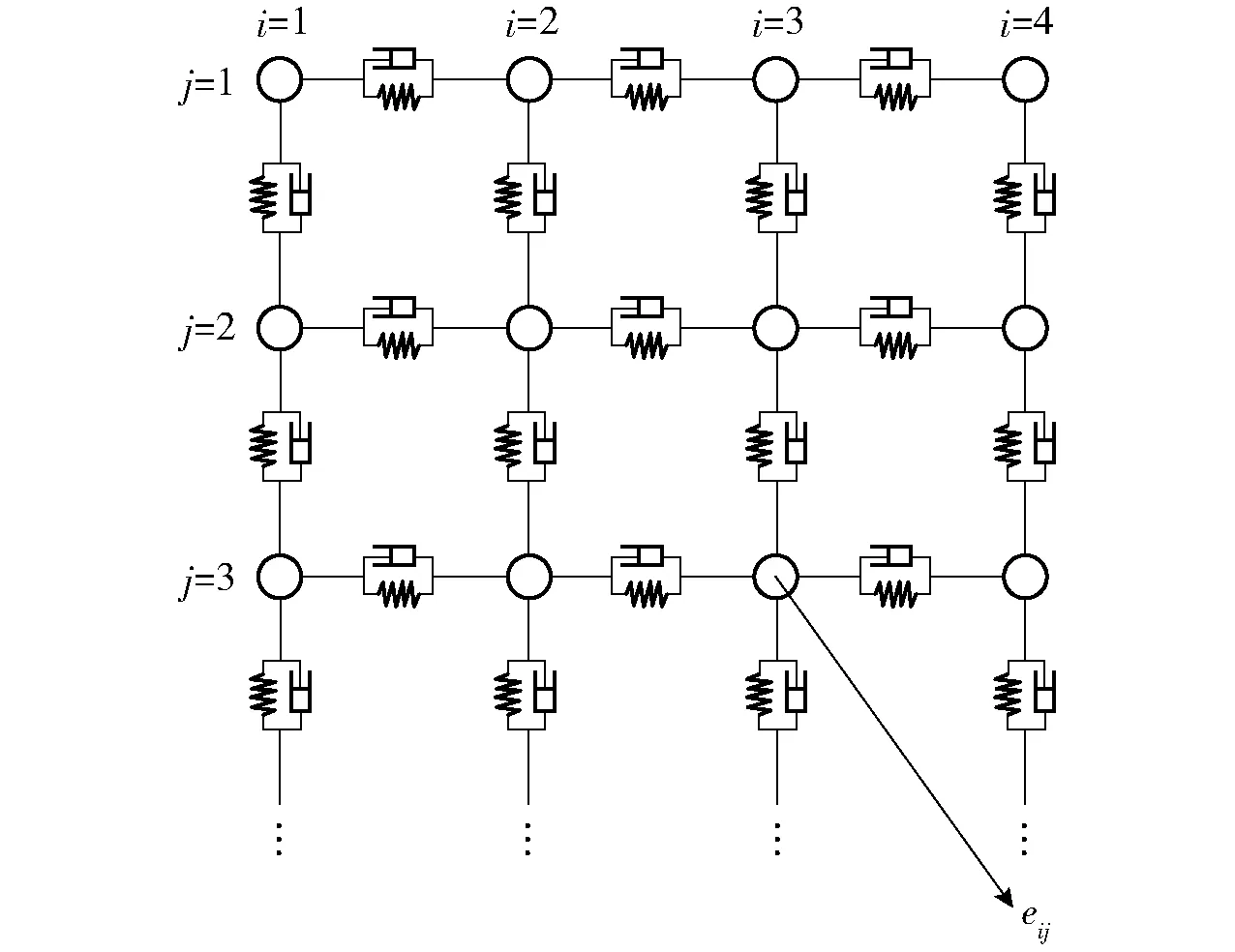
图4 布撒网集中质量模型Fig.4 Lumped mass of towed net model
单个作动单元的作用力记为Tn,表示图4中相邻网目节点间的子网带作用力:
(28)
式中:L、ΔL和Δv分别为作动单元两端相邻两节点间的子网带原长、伸长量及相邻质点速度差;cd为阻尼系数;En、An分别为网体材料的弹性模量及截面积,计算时均为常量。
根据图4中的网体结构,集中质点eij受到多条子网带作用力的影响。对于整体矩形网块上的质点eij,位于4个角点处、4条边界处及内部的集中质点分别受到2条、3条及4条子网带的张力作用。
对于内部的集中质点eij,根据(28)式,其所受周边4条子网带的合作用力为Tij,其在地面坐标系下可表达为

(29)
式中:Tijx、Tijy和Tijz分别为集中质点eij所受网带合作用力的x轴、y轴和z轴方向分量;Tij,(i-1)j为连接质点eij与质点e(i-1)j的子网带作用力大小;ΔLij,(i-1)j为此条子网带的伸长量,其他变量含义依次定义类推。对于角点及边界处的集中质点eij,其所连接的子网带条数相应减少,网带合作用力方程的列写原理与(29)式相同,不再赘述。
同理,对于布撒网体前端与火箭连接的牵拉钢索段以及后端与地面固连的回拉绳段,同样采用集中质量方法进行离散建模。
对于牵拉钢索,考虑到其抗弯刚度远大于柔性布撒网带,本文忽略钢索在飞行过程中的弯曲与振动,结合1.2.3节中的线弹性材料假设,认为牵拉钢索仅发生轴向拉伸变形。在此前提下,可将其直接离散成首尾两质点,牵拉钢索拉力Tw见(10)式。
回拉绳也采用集中质量方法建模,由于它是在火箭停止工作后的布撒网系统布设末段提供缓冲和限位作用,使布撒网主体落地姿态能够保持撑开并张紧,回拉绳采用的是拉伸模量较小、延伸率较大的绳索材料,因此假设绳索的张力与应变满足线弹性关系,略去作动单元中的阻尼器,采用传统质点- 弹簧模型离散回拉绳。记相邻质点间的回拉力为Tt,
(30)
式中:Lt、ΔLt分别为网带原长、伸长量;Et、At分别为回拉绳材料的弹性模量及截面积。
1.3.2 布撒网空气动力分析
柔性网体在飞行过程中,受空气动力的影响较大。在布撒网系统中,每段子网带的选材、原长及缝制结构完全相同,其空气动力系数均为C. 在雷诺数Re<200时,C随着流场的雷诺数不断变化[19],相应的函数关系[20]可表示为
(31)
(32)
式中:根据实际工况,取空气密度ρ=1.293 kg/m3,流场速度va=4 m/s,动力黏性系数μ=1.8×10-5Pa·s,网体空气动力系数如表1所示。
由于布撒网部分被离散为一系列集中质点,在列写系统动力学方程时,空气动力对质点eij的作用力Rij在地面坐标系下可表示为
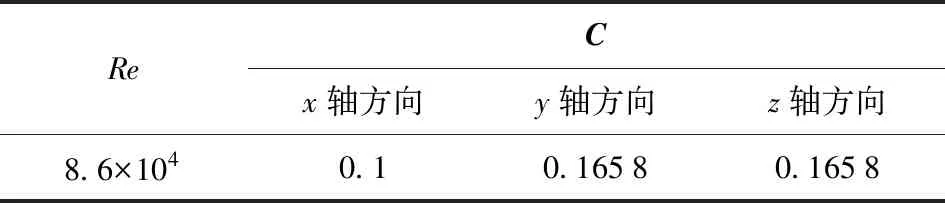
表1 布撒网空气动力系数
(33)
式中:vij为网目节点eij的速率值;Ax、Ay、Az分别为网带沿不同方向的截面积。
至此,集中质点eij的动力学方程可表示为
mijaij=Tij+Gij+Rij,
(34)
式中:mij、aij、Gij分别为网目节点eij的质量、加速度及重力。
(34)式在地面坐标系下可表示为
(35)
式中:xij、yij、zij分别为网目节点eij的位移分量;vijx、vijy、vijz为其速度分量。
1.4 横向杆模型
为使布撒网能在横向能够撑开并张紧,在网的前后两端和中间等距设置7根刚性横向杆,将布撒网分成6块,横向杆质量均为mb. 横向杆主要受网带拉力Tkb(k=1,2,…,8)及自身重力的作用,受力分析如图5所示。
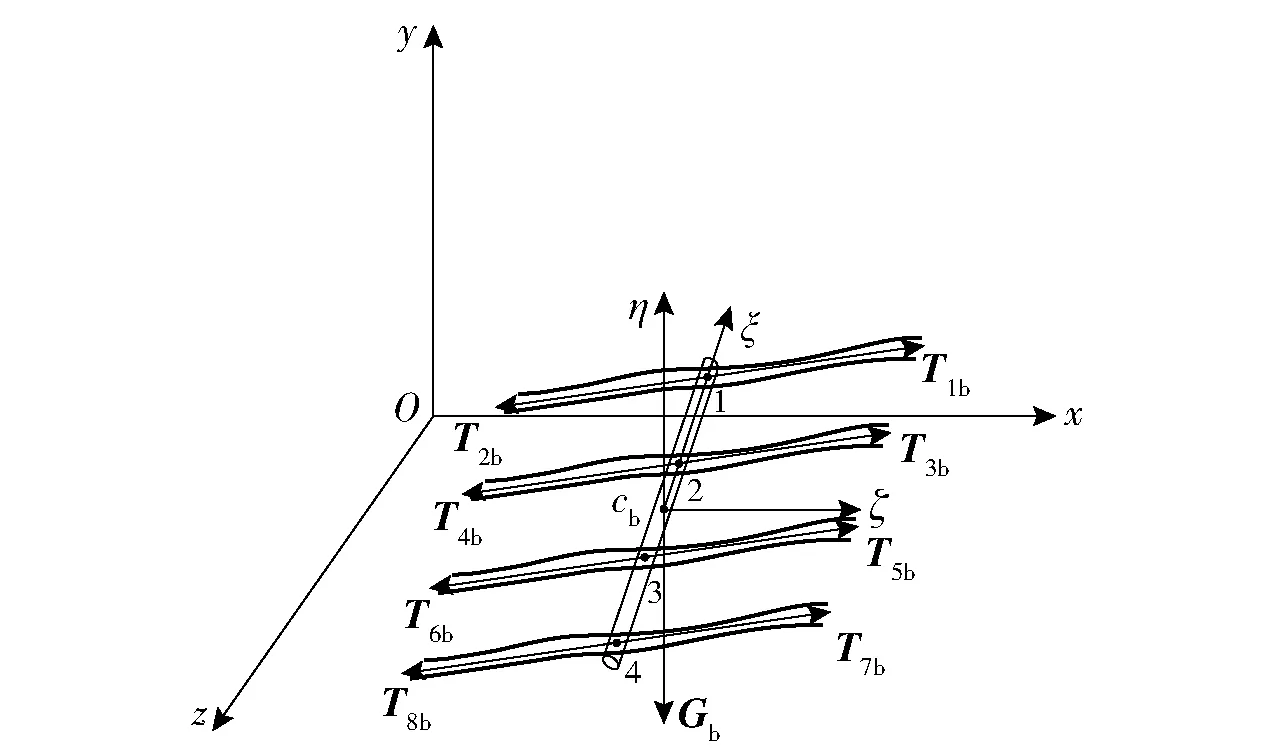
图5 横向杆受力分析示意图Fig.5 Force analysis of lateral bars
将横向杆简化为刚体建模,进行动力学分析时的坐标系与1.2节中刚体火箭的坐标系类似,分别以横向杆质心cb为坐标原点建立随体坐标系(cbζηξ)和基准坐标系(cbxyz)。设ε1b、ε2b为两坐标系之间的方位角,二者的坐标转换矩阵为

(36)
横向杆的刚体建模方法与火箭类似,过程不再赘述,地面坐标系下的质心运动方程为
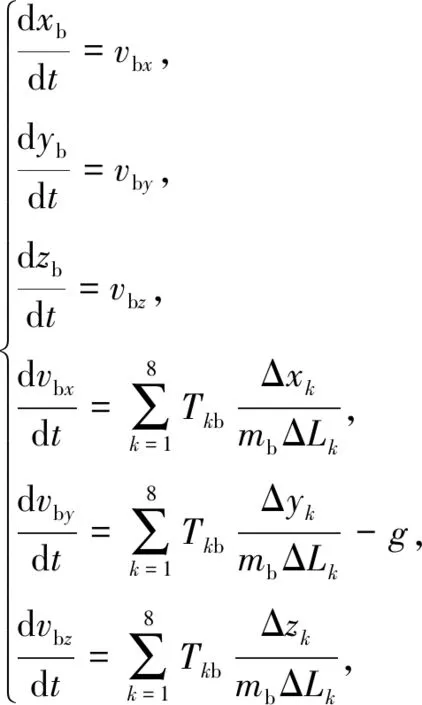
(37)
式中:xb、yb、zb分别为横向杆质心的位移分量;vbx、vby、vbz为其速度分量;ΔLk为第k条网带的伸长量;Δxk、Δyk、Δzk分别为ΔLk在地面坐标系下的3个分量。
描述横向杆姿态的转动方程为
Mb=(T1b+T2b+T7b+T8b)Lb1+
(T3b+T4b+T5b+T6b)Lb2,
(38)
式中:Mb为作用在横向杆上的合外力对其质心的合力矩;Lb1、Lb2为网带拉力对横向杆质心的力臂。由图5可知,由于网带在横向杆上等距分布,力臂长度有Lb1=3Lb2.
与上文推导火箭绕质心转动的原理相同,应用动量矩定理,横向杆的转动微分方程为
(39)
式中:Mbζ、Mbη为合力矩Mb在弹轴坐标系下的分量;Ab为横向杆的径向横截面积。
综上所述,已经逐一对包括火箭发动机、布撒网、回拉绳和横向杆在内的火箭拖拽布撒网系统各部分完成了力学建模,并得到了相应的动力学方程。将(19)式、(27)式、(35)式、(37)式和(39)式联立,即可得到系统动力学方程组,共包含[80+6(i×j)]个方程,其中i=144,j=4,i×j的值等于集中质点数。方程个数与系统总自由度相等,此常微分方程组可由Runge-Kutta等常用数值方法解算。
2 火箭拖拽布撒网系统动力学仿真
根据第1节推导的动力学方程组,利用MATLAB软件编制计算程序,对火箭拖拽布撒网系统的三维展开布设工作过程进行仿真模拟。
采用数值方法对常微分方程组进行求解时,先给出系统各待求坐标的初始值。布撒网悬挂式的初始位置构造相对复杂,横向杆受到固定约束,而柔性网体部分则处于自然悬垂状态,即在重力和张力作用下处于平衡状态。因此,构造悬挂式初始状态时,无法根据实际结构尺寸直接计算各广义坐标的初始值,需要对布撒网的自然悬垂状态进行求解,从而得到网体质点的初始位置[21]。根据实际工况,仿真中采用的计算参数如表2所示。
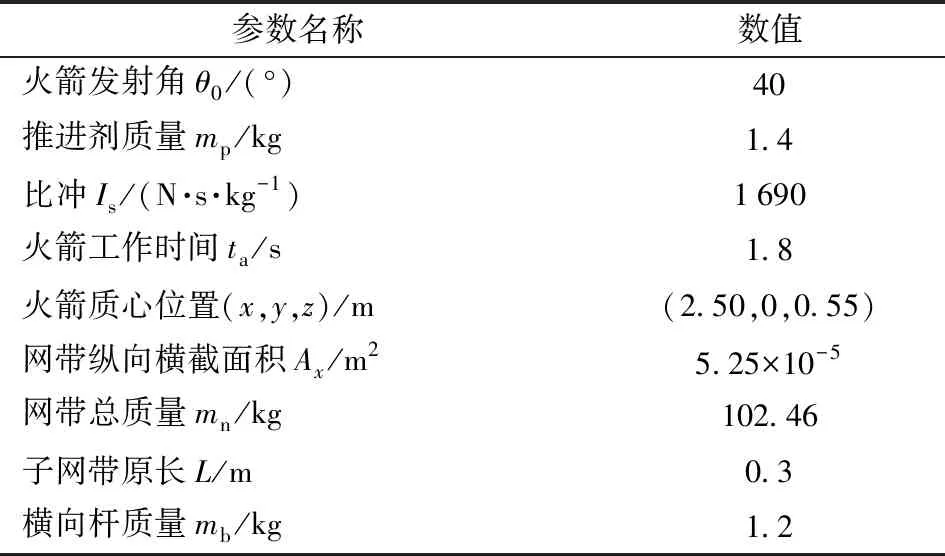
表2 仿真参数
注:结合图4中建立的布撒网集中质量模型,网带总质量mn由网目节点质量mij乘以节点总数i×j求得。
仿真得到的系统工作过程如图6~图11所示,其中x为纵向距离,y为高度,z为横向距离。
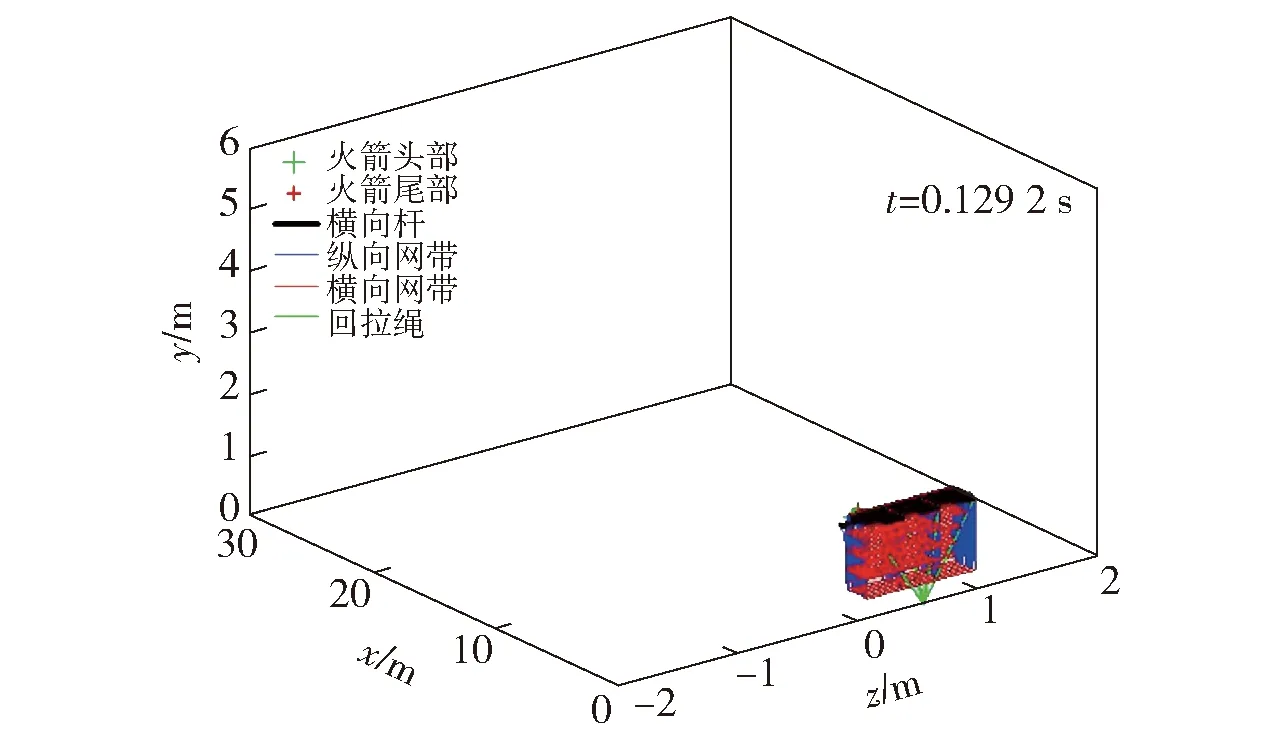
图6 网体被拉出瞬间Fig.6 Pull-out moment of net
图7 火箭弹道上升阶段Fig.7 Ascending stage of rocket trajectory

图8 火箭弹道最高点瞬间Fig.8 Moment of rocket trajectory reaching a peak point

图9 回拉绳受力瞬间Fig.9 Tripping line starting working
图10 火箭停止工作Fig.10 Rocket stopping working

图11 火箭着陆瞬间Fig.11 Moment of rocket landing at ground
图6~图11给出了系统三维展开布设过程的6个特征时刻:
1)t=0.129 2 s,首根横向杆开始受力,布撒网被拉出瞬间,此时牵拉钢索拉力Tw将发生突变,并迅速达到其峰值2 956 N;
2)t=0.581 7 s,火箭处于弹道上升阶段,其持续受到自身发动机的推力驱动,飞行高度不断上升,布撒网体被陆续拉出发射箱体;
3)t=1.094 4 s,火箭达到弹道最高点5.39 m,此时,已有4块子网被完整拉出进入空中飞行阶段;
4)t=1.301 6 s,回拉绳出现弹性形变,开始对布撒网体起到缓冲、限位作用;
5)t=1.800 0 s,火箭停止工作,整个系统开始自由飞行;
6)t=1.907 2 s,火箭着陆,布撒网系统到达布设距离。
3 火箭拖拽布撒网系统飞行试验及结果分析
3.1 外场飞行试验
为进一步研究布撒网系统的展开规律并验证计算模型的可靠性,本文设计了火箭拖拽布撒网系统的试验样机,完成了外场飞行试验。试验中使用高速摄像机记录了全部过程。
图12所示为系统发射前的部署情况,图13所示为发射- 飞行- 布设的完整工作历程,t=0 s为火箭点火发射时刻。

图12 发射前部署情况Fig.12 Rocket towed net system before test
3.2 试验结果与仿真对比分析
将试验现象与本文的集中质量模型仿真结果相比较,由于文献[2]中的计算工况与本文相同,引入文献[2]提出的多刚体模型作为参照。为方便叙述,将本文提出的集中质量模型称为模型1,将文献[2]中的多刚体模型称为模型2. 将三者体现的系统工作历程进行对比,评估计算模型的可靠性。
首先对火箭外弹道数据进行比较,取火箭外弹道轨迹(火箭质心纵向飞行距离x、高度y)、弹体俯仰角θ和质心速度(水平速度vx、铝垂速度vy)作为评估参数。比较结果如图14~图17所示。
图15 弹体俯仰角对比Fig.15 Comparison of rocket pitch angles

图16 弹体质心水平速度对比Fig.16 Comparison of horizontal velocities of rocket mass center
图17 弹体质心铅垂速度对比Fig.17 Comparison of longitudinal velocities of rocket mass center
从图14中可见:从最终布设距离来看,模型1(33.55 m)相对于模型2(39.01 m)更接近试验结果(33.12 m),误差为1.39%;在外弹道初期,模型1、模型2与试验的弹道发展趋势相同,但模型1的弹道更高;在弹道最高点方面,相比试验结果(4.72 m),模型1(5.39 m)与模型2(5.19 m)都偏高,误差分别为14.19%和9.96%.
受后续不断从箱体拉出的布撒网块影响,火箭尾部扰动较大,弹体俯仰角变化剧烈。实际试验时,火箭俯仰角前期(0.4 s前)振荡剧烈,然后趋于平缓。图15中,模型2的俯仰角总体振荡幅度明显低于模型1与试验,且0.4 s后的俯仰角变化较小,出现失真现象。实际试验中,0.4 s前火箭俯仰角的变化范围为-38.70°~55.04°,模型1吻合程度较好,最大误差为7.93%.
图16体现了火箭质心水平速度的对比。从整体趋势看,模型1速度低于实际值,模型2高于实际值,但模型1的误差量较小,符合程度较好;从速度曲线极值看,模型2(25.73 m/s)与试验(27.10 m/s)几乎同时在0.2 s左右达到最大速度,而模型1(25.57 m/s)较之晚0.1 s,模型1、模型2的误差分别为5.65%、5.06%;火箭在弹道末端着地,模型1和试验结果的水平速度出现剧烈下降并趋于平稳的现象,模型2在这一阶段描述失真。
图17体现了火箭质心铅锤方向速度的对比。从整体趋势看,三者在0.58 s前变化幅度较大,且都在0.23 s附近达到极值;从速度曲线极值看,模型1、模型2的最大速度(分别为6.64 m/s、9.79 m/s)均小于实际情况(17.58 m/s);在弹道末端,模型1和试验结果的铅锤速度出现强烈正向反弹并在最后趋于0,这一结果符合弹体着地后回弹向上并最终停止的实际现象,模型2在这一阶段描述失真。
通过对火箭外弹道的比较,可知模型1描述的外弹道与试验结果更加吻合,相对于模型2,本文的仿真结果未出现失真,误差率整体较小。本文模型误差出现的关键原因在于假设火箭推力为恒值不变。而实际工况中,火箭推力随时间变化,存在上升、稳定、下降等不同阶段,且存在一定波动,将推力视为恒值本身将产生误差。
在验证本文模型的可靠性后,继续分析本文仿真结果,研究布撒网系统其他要素的动力学特性。

图18 牵拉钢索拉力时程曲线Fig.18 Tension on wire rope
图18所示为牵拉钢索的拉力时程变化。由图18中可以看出,拉力Tw的变化频率很高,在布撒网首根横向杆被拉出后不久,钢索拉力在0.3 s时达到最大值3 kN,此峰值约为火箭发动机推力的3倍。0.5 s后,拉力稳定在0~1 kN. 由于钢索拉力的作用线一般不经过火箭质心,其对火箭还有转矩作用。该转矩一方面与拉力大小有关,另一方面与火箭俯仰角和拉力方向角有关。因此,图18中高峰值、高变化频率的牵拉钢索拉力Tw将大幅度降低火箭姿态的稳定性。考虑到火箭推力合力方向始终沿弹体轴线方向,牵拉钢索对弹体的扰动同时将造成火箭推力方向的剧烈变化,进而影响布撒网系统的空中展开姿态。从对布撒网系统的工程设计角度来看,图18所体现的数值仿真结果表明,牵拉钢索的选材是决定火箭及布撒网体的空中姿态及最后布设效果的重要因素。不同于布撒网体与回拉绳索,其弹性模量Ew远大于前二者,选材稍有不同,将造成钢索拉力的巨大差异,Tw的峰值甚至能达到十几倍火箭推力,导致火箭姿态严重失稳、在主动段提前下坠触地甚至反向飞行等异常现象。在今后设计不同尺寸型号的布撒网系统时,应结合本文提出的模型,由数值模拟得到牵拉钢索的拉力变化,谨慎选择不同弹性模量的钢索材料。
图19体现了火箭的角速度ω变化历程,由于火箭姿态主要受牵拉钢索影响,角速度变化趋势也接近于钢索拉力。0.5 s前,角速度在-30~30 rad/s之间剧烈变化;0.5 s后,由于拉出网块增多,角速度变化趋于平缓(-10~10 rad/s)。

图19 火箭角速度变化历程Fig.19 Rocket angular velocity
图20给出了火箭攻角δr的变化历程(-0.6~0.6 rad),可见当弹体着地后攻角骤降至0°.

图20 火箭攻角变化历程Fig.20 Rocket angle of attack
4 结论
本文提出了内含弹簧- 阻尼器作动单元的集中质量模型,运用弹箭外弹道理论完成了火箭拖拽布撒网系统中的柔性布撒网块和火箭等部分的三维动力学建模,推导得到了系统动力学方程组。结合MATLAB软件仿真计算及外场飞行试验,分析了包括火箭角速度、攻角、俯仰角、质心外弹道及速度和钢索拉力在内的一系列系统要素,全面考察了系统动力学特性。所得主要结论如下:
1) 仿真与试验的火箭射程均达到33 m以上,布撒网布设到位率达到90%以上。
2) 本文模型能够反映火箭末端牵拉钢索对弹体的高频强扰动现象,在对布撒网系统进行工程设计时,通过数值模拟得到的拉力时程曲线可作为钢索选材的理论依据。
3) 通过仿真结果与试验现象的对比分析,验证了弹簧- 阻尼器集中质量模型的可靠性,并与基于Kane方法的多刚体模型进行比较,指出本模型在描述火箭拖拽布撒网系统各要素变化趋势及极值情况时的准确度更高,仿真结果未出现失真。与多刚体模型相比,弹簧- 阻尼器作动器的加入补充了对网带轴向变形的描述,描述了网体的部分柔性体性质。
本文模型仍有许多可以改进之处。如假定火箭推力为恒值,而实际工况下的点火延迟以及推进剂燃烧不均匀现象不可避免,因此仿真结果在外弹道初期与试验现象的误差较大。在今后工作中应进一步将上述因素考虑到建模过程中。