基于逆向导航算法的捷联式惯性导航系统改进优化对准方法
2019-10-25朱兵许江宁吴苗李京书何泓洋李峰
朱兵, 许江宁, 吴苗, 李京书, 何泓洋, 李峰
(1.北京跟踪与通信技术研究所, 北京 100094; 2.海军工程大学 电气工程学院, 湖北 武汉 430033;3.海军工程大学 作战运筹与规划系, 湖北 武汉 430033;4.海军研究院, 北京 100841)
0 引言
捷联式惯性导航系统(SINS)由于自主性强、隐蔽性高、结构简单、体积小及成本低等优点,在航空、航天、航海等领域得到广泛关注和应用[1-2]。初始对准是SINS进行导航解算前的必经阶段,粗对准是初始对准的重要环节,能够为Kalman精对准提供粗略的姿态先验信息[3]。SINS动基座快速对准成为近年来关注和研究的热点之一[4-6]。文献[7]通过敏感重力加速度和地球自转角速度信息计算载体的姿态阵,但该方法只适用于载体处于静基座或小幅度晃动基座的状态。针对动基座对准问题,文献[8-9]利用两个观测矢量确定载体的初始姿态阵,提出一种适用于动基座的优化对准方法(OAM)。文献[10]指出OAM受惯性测量单元(IMU)方向性误差(零偏)的影响较大,提出了基于滑动窗的优化对准方法,有效克服了陀螺零偏带来的累积效应。
随着科学技术的不断发展,陀螺仪精度的提升使得其零偏累积效应对优化对准方法精度的影响逐渐减小,甚至可以忽略不计。快速性和精度是SINS动基座对准的重要指标,为了同时满足快速性和高精度的要求,文献[11]借助现代计算机强大的计算能力,将逆向导航[12]概念引入捷联罗经对准中,对存储的陀螺仪和加速度计数据进行反复使用,有效提高了初始对准的精度和快速性。在深水全球定位系统(GPS)信号无法传播(如潜艇等水下航行器)或陆上GPS信号无法正常使用(如外界环境复杂多变、干扰较大),即没有导航坐标系(n系)外部速度信息辅助动基座的对准条件下,常用多普勒计程仪(DVL)或里程计(OD)提供的载体坐标系(b系)下速度信息作为外部辅助信息[6,13]。为了抑制由于OD分辨率较低对OAM对准性能的不良影响,文献[13]利用罗经回路对OD输出的速度进行降噪平滑处理,有效提高了b系速度辅助OAM的动基座对准性能。动基座粗对准要求对准时间短,使得OAM[8-9]中的观测矢量包含的观测信息不足,进而导致对准精度下降。
本文首先对b系下的OAM进行了推导,然后分析了观测矢量与初始对准精度之间的关系,提出一种基于逆向导航解算的改进动基座初始粗对准(IMCA)方法。IMCA方法利用逆向导航算法对存储的陀螺仪及加速度计数据进行逆向处理,并对正逆向数据加以反复使用、连续时间积分,从而可在不增加原数据长度情况下构建新的观测矢量,进而提高初始对准精度。利用车载试验实测数据进行b系下动基座初始对准试验,结果表明:相比于OAM,本文提出的IMCA方法具有更高的初始对准精度及稳定性。
1 b系下动基座初始对准方法
1.1 逆向导航基本原理
记导航坐标系为当地地理坐标系n系(东- 北- 天);载体坐标系为b系(右- 前- 上);地球坐标系为e系;惯性坐标系为i系;凝固导航坐标系为初始时刻地理坐标系“n,0”系;凝固载体坐标系为初始时刻载体坐标系“b,0”系;凝固地球坐标系为初始时刻地球坐标系“e,0”系。“n,0”系、“b,0”系和“e,0”系均相对惯性空间不动。记随动导航坐标系和随动载体坐标系分别为“n,t”系、“b,t”系。SINS的姿态更新方程和速度更新方程[2]分别为
(1)
(2)

逆向导航是基于计算机的数据处理过程,它利用导航解算过程中存储的角速度信息和比力信息进行反向解算,从而得到逆向姿态、速度和位置信息[11-12,14]。但是,文献[11-12]中的逆向导航方法由正向导航切换到逆向导航时,速度会发生突变。因为OAM不具备鲁棒性,所以速度突变会极大地降低OAM的对准性能。因此,文献[11-12]中的逆向导航方法不能直接用于OAM动基座对准中。
记IMU的采样周期为Ts,利用欧拉方法对(1)式和(2)式进行离散化,得
(3)
(4)

(5)
(6)
记逆向导航解算过程时间参数为r,r=1,2,…,N,正向导航解算过程时间参数k与r之间的对应关系为k=N-r+1,则逆向解算过程的起始/结束时刻为正向解算过程的结束/开始时刻。根据(6)式,可假设正向解算过程与逆向解算过程中所利用的存储数据关系式为
(7)
(8)
(9)
(10)

根据(7)式~(10)式,可将(5)式和(6)式改写为
(11)
(12)

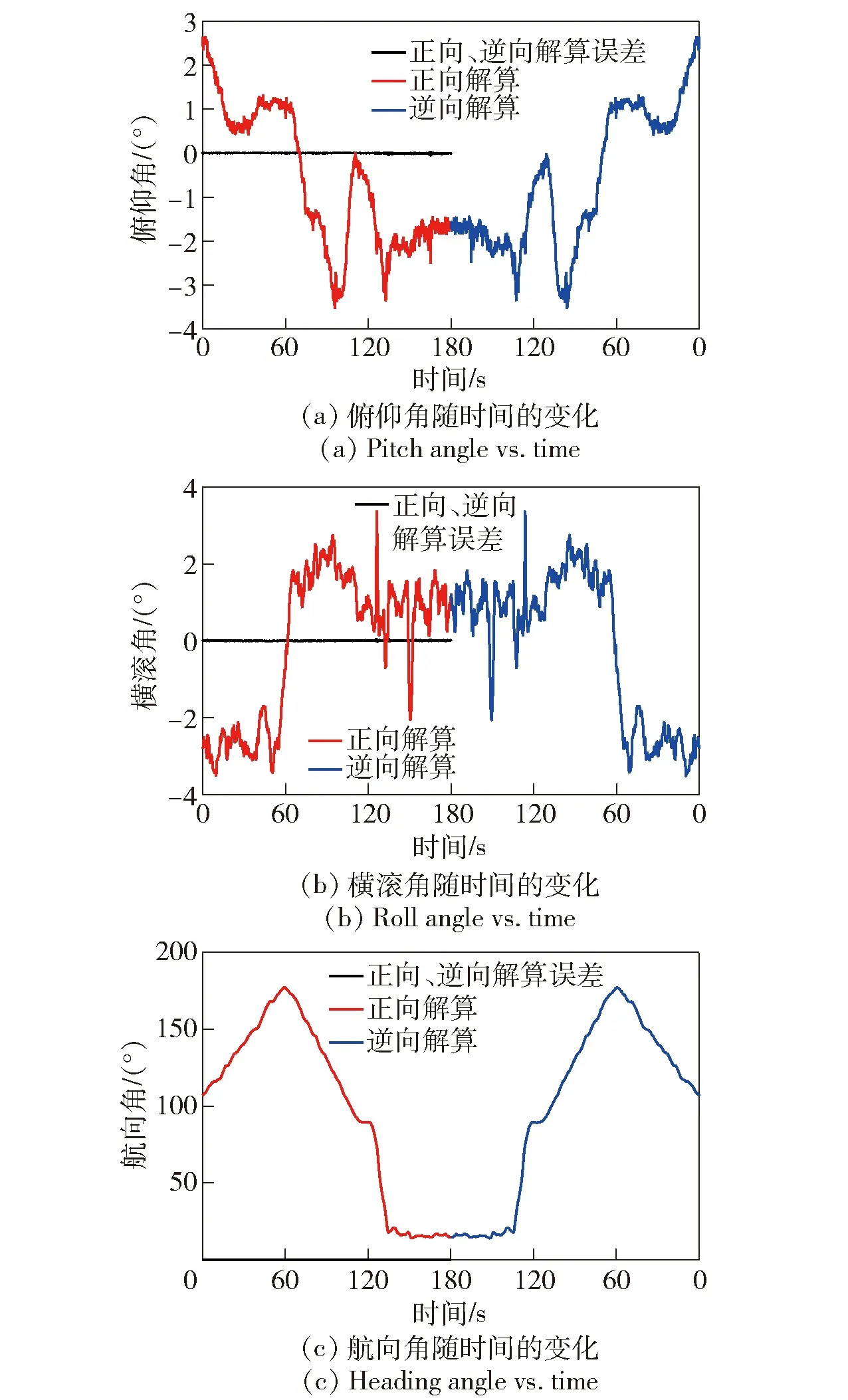
图1 正向、逆向姿态角及姿态误差Fig.1 Forward and backward attitude angles and attitude errors
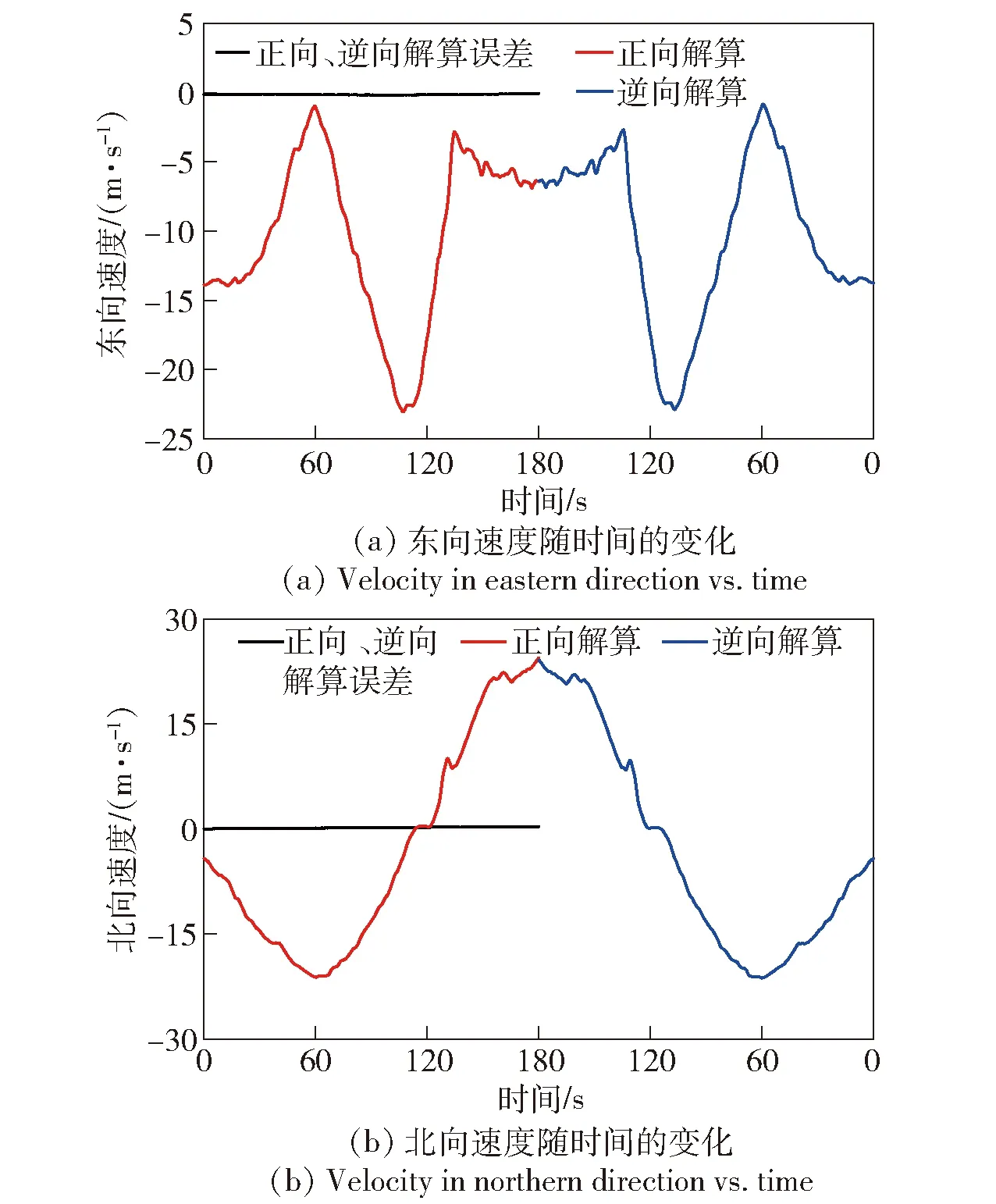
图2 正向、逆向速度及速度误差Fig.2 Forward and backward velocities and velocity errors
由图1和图2可知,本文逆向导航算法能够准确地复现正向导航过程中的姿态和速度,即与正向导航具有相同的解算精度。由图2还可以看出,在t=180 s,即由正向导航切换到逆向导航时,速度并没有发生突变。因此,本文研究的逆向导航方法可直接用于基于OAM的动基座对准中。
1.2 b系下动基座对准基本原理

在水下GPS信号无法传播的环境或陆上GPS信号无法正常使用的环境中,外部辅助速度信息为由DVL或OD提供的b系下速度。b系下优化对准方法的推导过程如下:

(13)
(14)

(15)
(16)
(17)

(18)

(19)
对(19)式进行整理,可得
(20)
(21)
定义t时刻的观测矢量αv,t、βv,t分别为
(22)
(23)
(24)
在实际应用中,需要对(24)式进行离散化处理:
(25)


(26)

(27)
则(25)式对应的实对称观测矩阵K[8-9]为
(28)
2 观测矢量优化方法
动基座初始对准的精度和快速性直接影响SINS快速启动的性能。但是,使用短时间的数据会造成αv,k和βv,k包含的信息量不足,进而导致对准精度下降。当陀螺仪零偏较小即陀螺仪零偏的累积(积分)效应较小时,增加αv,k和βv,k的积分区间[0,t]长度可有效提高初始对准的精度[10,16]。通过逆向导航算法对正向过程中存储的数据进行逆向处理,并在正向积分结束后利用逆向数据对(22)式和(23)式进行连续时间积分,即可实现对正向存储数据的重复使用,有效增加观测矢量包含的信息量,从而实现对观测矢量的优化。对正向数据和逆向数据进行1次积分处理的过程如图3所示。

图3 正向、逆向数据的1次积分过程Fig.3 One time integral of forward and backward data
由图3可知,逆向数据与正向数据构成一组新的数据,长度为原数据的2倍。对正向数据和逆向数据进行1次积分处理,可得观测方程为
1.自我评价和他人评价相结合,强调自我反思评价。在自主学习的过程中,学习者的自我反思是完成教学目标的重要条件。学生需要将在学习过程中以及学习之后自己的所思、所想、所做进行合理的反思和整合。为了学生的自我反思,可以设计反思评价表,以问题的形式督促学生反思。
(29)
对正向数据进行一次重复使用,可使观测矢量包含的信息量有效增加[16]。即对正向数据进行一次重复使用,将有利于构建新的观测矢量,进而有利于提高对准精度。另外,逆向解算过程初始时刻的位置是未知的,在整个过程中,逆向初始时刻的位置是利用正向数据进行初始对准确定的初始姿态阵经过航位推算得到的。当SINS动基座对准所需要的外部辅助速度是由DVL或OD提供的b系下参考速度vb时,需要利用姿态阵首先将b系下的速度根据(13)式转化为n系下的速度vn,才能进行航位推算。


图4 正向、逆向数据连续n次积分过程Fig.4 n-times integral of forward and backward data
图4中,对存储的陀螺仪和加速度计数据进行反复使用的导航方式也称为回溯导航[17]方式。由图4可以看出,对正向、逆向数据进行连续n次积分处理的过程为:1)利用正向、逆向数据进行1次积分处理;2)在逆向结束时刻再次利用正向数据进行连续时间积分,以此类推,直到对准结束。由正向过程切换到逆向过程时,逆向初始时刻的位置均是由对准得出的初始姿态阵利用正向数据经航位推算得到的。由图4可知,通过连续n次正向、逆向积分,可将数据长度扩展为原数据长度的2n倍,n为不为0的自然数。对正向数据和逆向数据进行n次积分处理,可得观测方程为
(30)
定义(30)式对应的实对称观测矩阵Km为
(31)

3 试验验证与结果分析
3.1 数据来源
通过安装在试验车上的IMU和OD获取实测数据。试验车上同时安装一套单天线的GPS接收机,输出频率为1 Hz. 试验过程设计为:当SINS开机时,载车保持静止1 200 s;然后载车驶出,运动1 800 s. 记录整个过程中陀螺仪和加速度计的原始数据,GPS输出的速度、位置以及OD的输出。因此,可通过IMU静基座初始对准和SINS/GPS组合导航建立姿态和速度基准。IMU和OD的主要性能指标分别如表1所示。

表1 IMU和OD的主要性能指标
图5所示为OD输出的速度数据。从图5中可以看出,OD采集的速度信息分辨率较差,OAM对外部辅助速度信息非常敏感,尤其是速度突变时会极大地降低OAM的对准性能。因此本文还采用文献[13]中的罗经降噪方法对OD输出的速度进行平滑处理,以保证OD提供外部辅助速度的可用性。
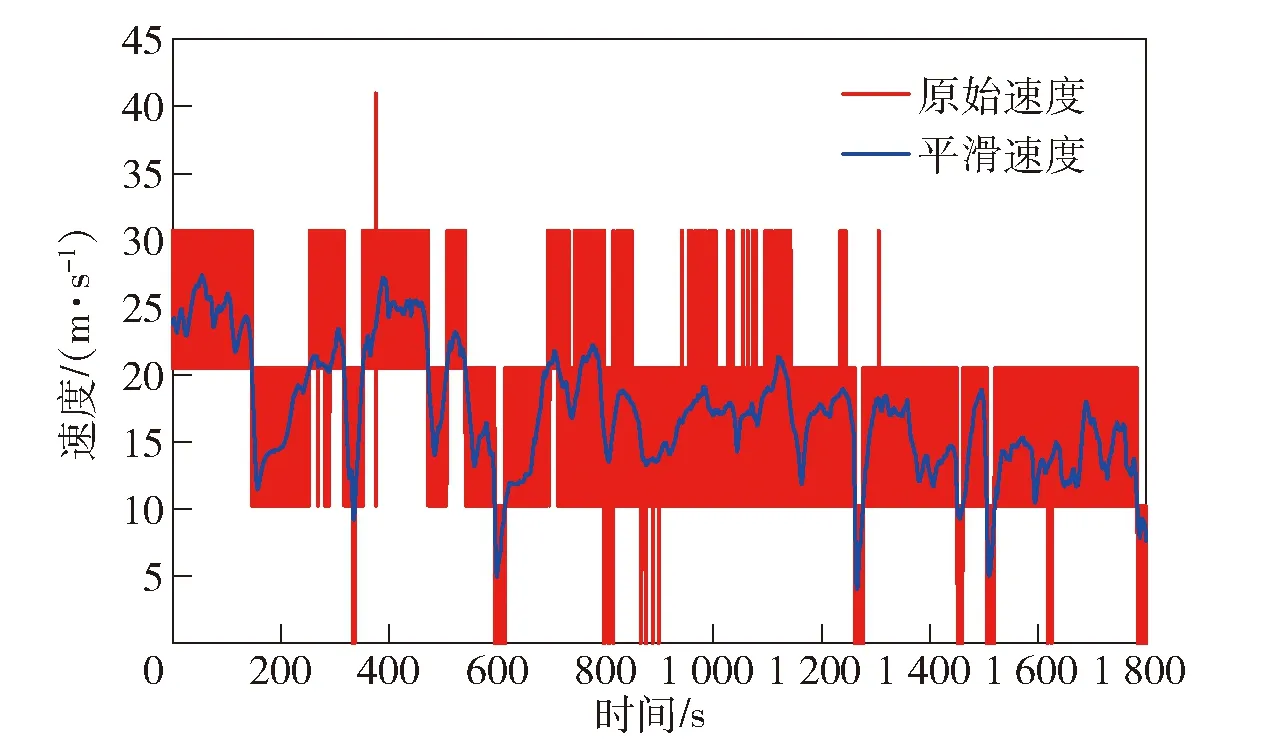
图5 OD的输出Fig.5 Output of odometer
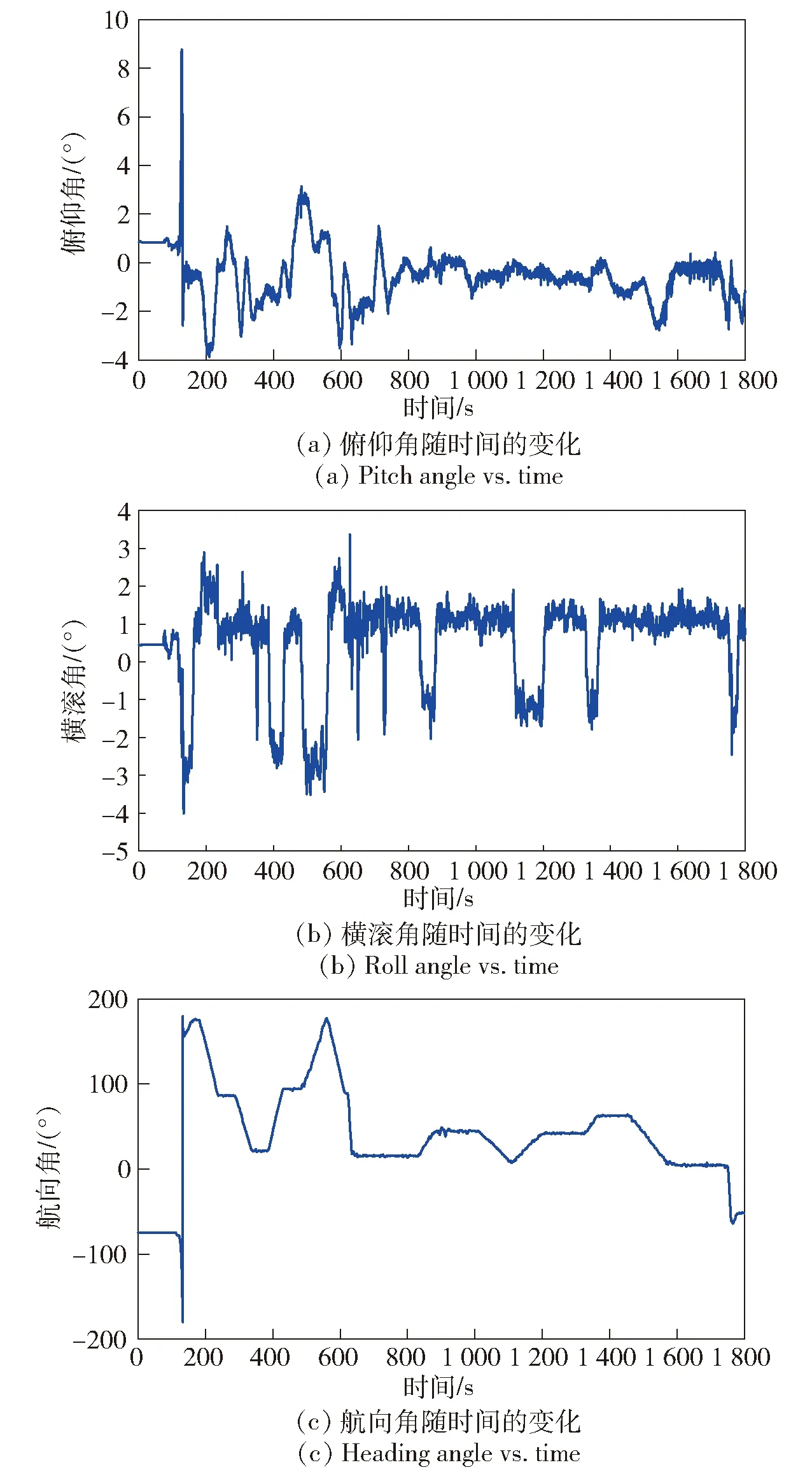
图6 参考姿态随时间的变化Fig.6 Reference attitude vs. time
试验过程中,SINS/GPS组合导航输出的姿态基准和速度基准随时间变化的曲线分别如图6和图7所示。由图6和图7可以看出:试验过程中载车的水平姿态角在-4°~10°范围内变化,航向角在-200°~200°范围内变化;载车的东向速度在-25~15 m/s范围内变化,北向速度在-25~30 m/s范围内变化。上述试验过程中,载车的机动范围比较大,因此试验结果可以反映出载车在正常机动条件下的初始对准性能。从试验数据中选取6组时长为180 s载车处于不同运动状态下的动态数据,对IMCA方法和OAM性能进行对比验证试验,结果如图8所示。
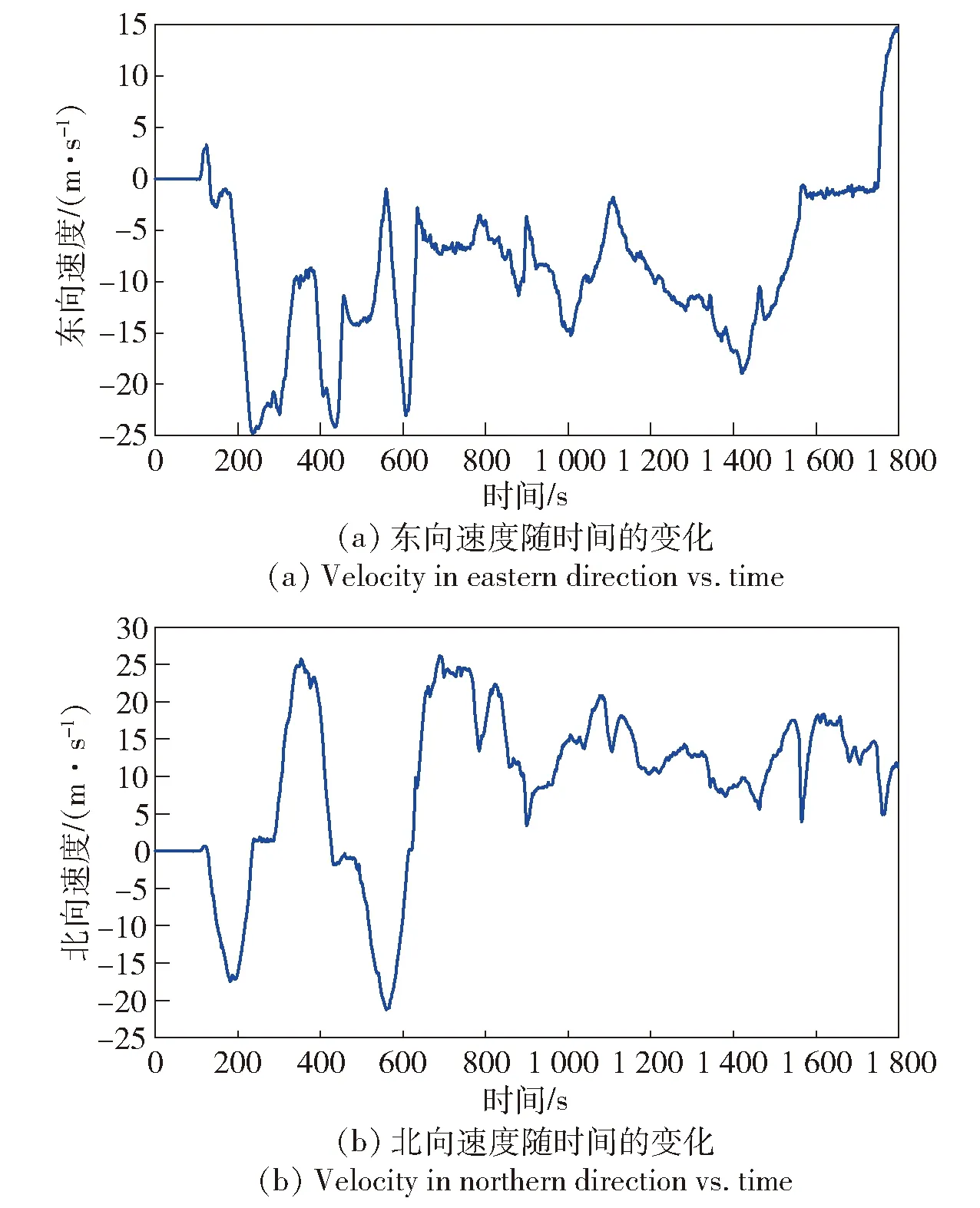
图7 参考速度随时间的变化Fig.7 Reference velocity vs. time
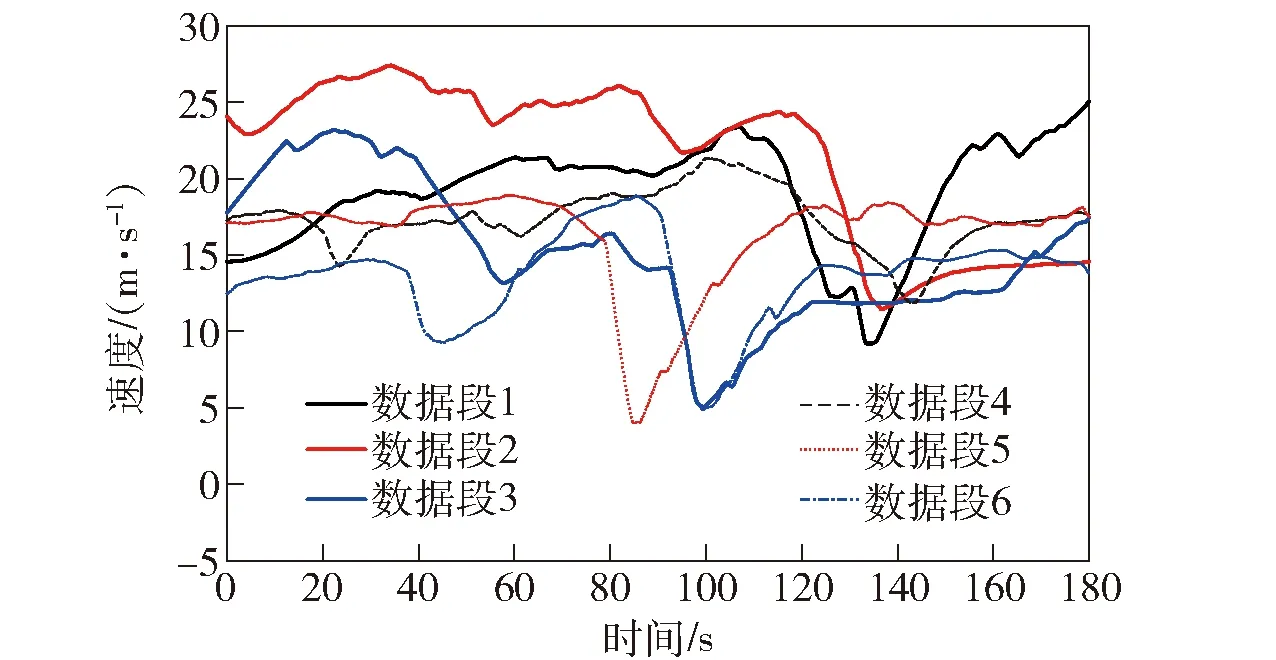
图8 不同运动状态下OD的输出随时间的变化Fig.8 Outputs of odometer vs. time under different states of motion
3.2 试验验证与分析
为了验证IMCA方法的有效性,选取图8中数据段1对应的动态试验数据,分别利用OAM和IMCA方法进行动基座初始对准试验:1)利用OAM进行动基座初始对准试验;2)利用IMCA方法进行动基座初始对准试验,n=1;3)利用IMCA方法进行动基座初始对准试验,n=2;4)利用IMCA方法进行动基座初始对准试验,n=5;5)利用IMCA方法进行动基座初始对准试验,n=10. 由动基座初始对准试验得到的俯仰角、横滚角和航向角误差随时间的变化曲线分别如图9~图11所示。
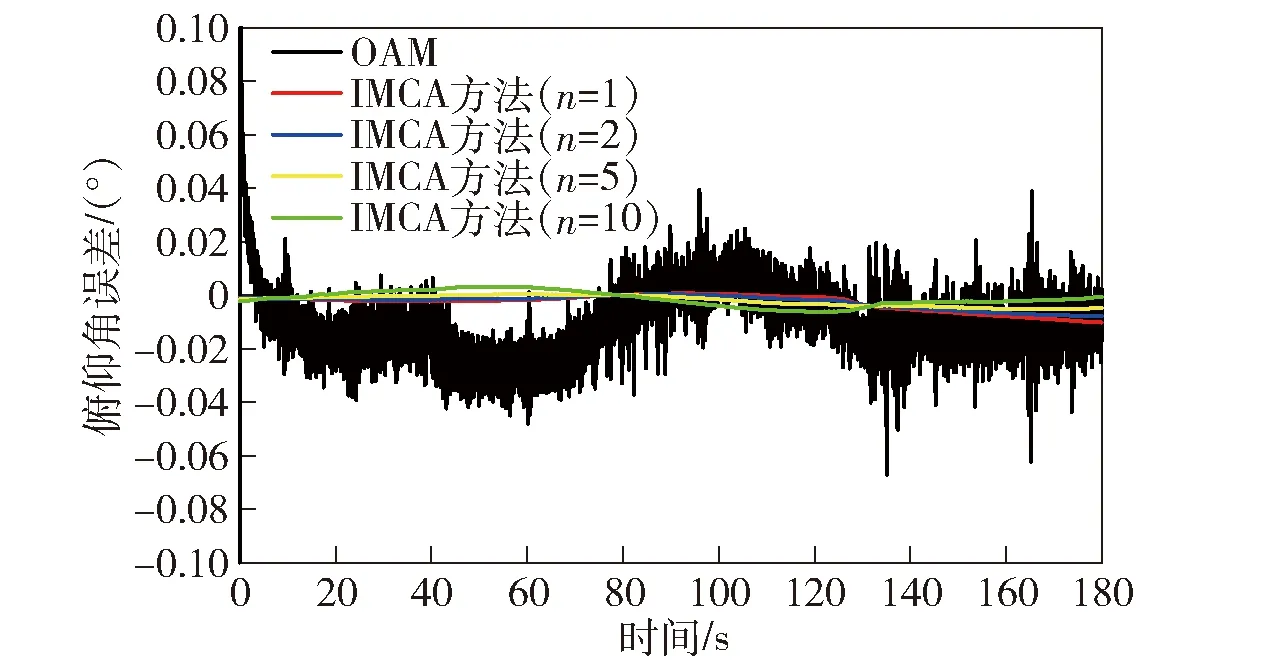
图9 俯仰角对准误差随时间的变化Fig.9 Alignment errors of pitch angle vs. time

图10 横滚角对准误差随时间的变化Fig.10 Alignment errors of roll angle vs. time
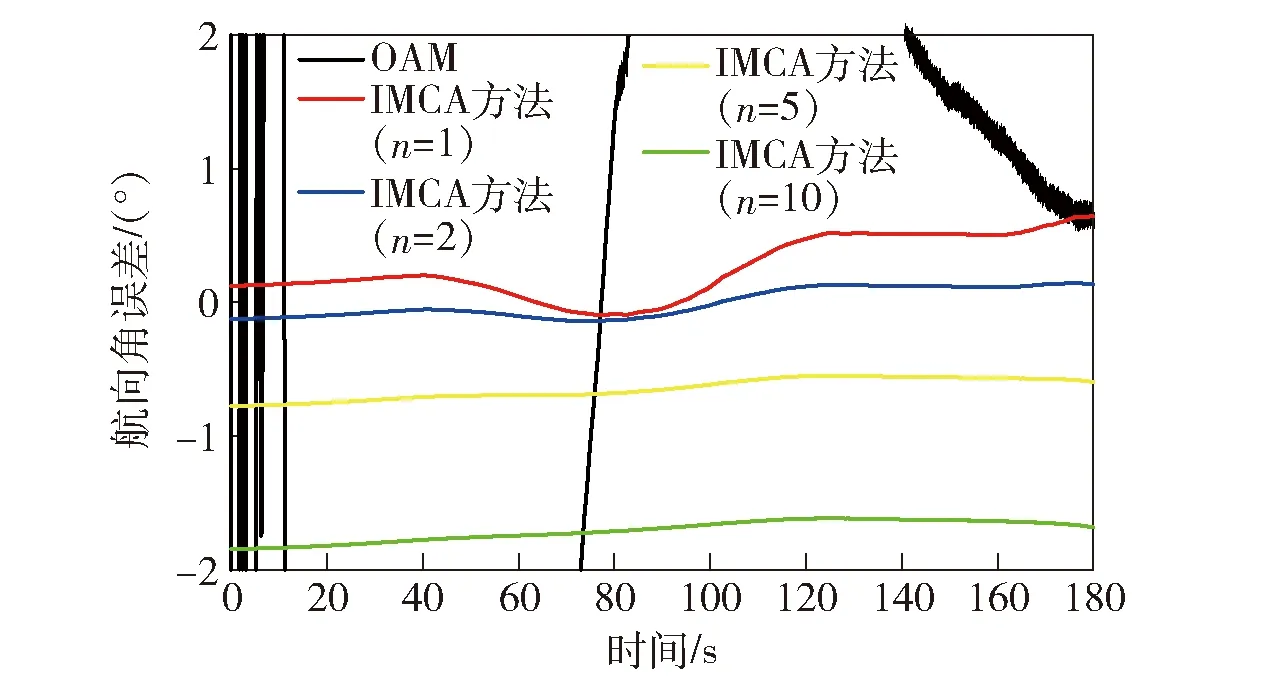
图11 航向角对准误差随时间的变化Fig.11 Alignment errors of heading angle vs. time
由图9~图11可以看出:本文提出IMCA方法的对准性能明显优于OAM;IMCA方法得到的俯仰角和横滚角误差均能够迅速地收敛到区间[-0.02°,0.02°]以内;IMCA方法得到的水平姿态角误差曲线和航向角误差曲线的稳定性明显好于OAM,而且利用IMCA方法得到的水平姿态角对准误差曲线比OAM更平滑。这是因为IMCA通过对原数据进行反复使用来延长积分时间,有利于进一步消除随机噪声对初始对准结果的影响。
根据图9~图11可知,积分区间长度(即n)影响IMCA方法的对准性能。由图11可以看出:当n=2时,航向角的对准精度迅速地收敛到区间[-0.15°,0.15°]以内,且对准精度明显高于n=1、n=5和n=10时的对准精度;当n=1时,航向角的对准精度高于n=5和n=10时的对准精度。这是因为当n较小(n≤2)时,陀螺仪零偏的累积效应较小,此时随着n的增加,观测矢量不断更新使得观测矩阵K中的信息量不断增大,进而使得初始对准精度不断提高。此时,增加积分次数n可有效提高航向角的对准精度。但是,当n较大即n>2时,陀螺仪零偏的累积效应对初始对准的影响不断增大,此时n的增大使得陀螺仪零偏的累积效应对初始对准的精度减小的贡献大于观测信息量的增加对初始对准精度提升的贡献。因此,随着对正向、逆向数据重复使用的次数进一步增多,即n进一步增大,使得重构数据的长度和积分区间的长度不断增大,此时陀螺仪零偏的累积效应对初始对准的结果影响将不得不重新考虑。若要同时兼顾对准的速度和精度,则应根据实际情况合理选取n值。通过以上分析可知,相比于OAM,IMCA方法可达到更优的对准性能。
试验过程中,基于OAM、IMCA方法(n=1)和IMCA方法(n=2)对准得到的姿态角,利用(13)式将OD输出b系下的速度转换到n系,进而推算出的位置分别记为“推算位置1”、“推算位置2”和“推算位置3”,推算位置的误差分别记为“位置推算误差1”、“位置推算误差2”和“位置推算误差3”. 初始对准过程中,OAM、IMCA方法(n=1)和IMCA方法(n=2)对位置的跟踪情况如图12和图13所示。
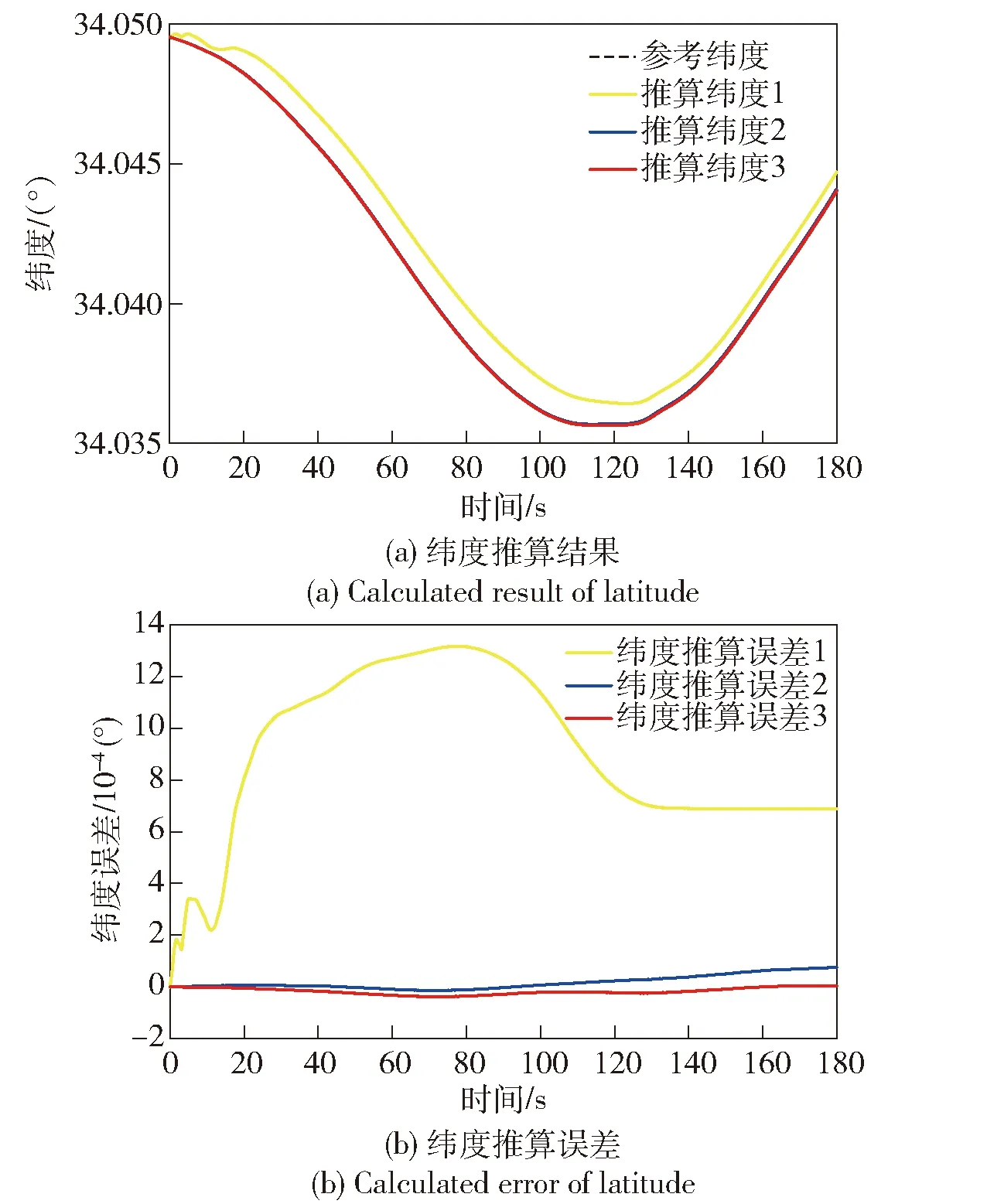
图12 纬度推算结果及误差Fig.12 Reckoning result and error of latitude

图13 经度推算结果及误差Fig.13 Calculated result and error of longitude
由图12和图13可以看出,相比于传统OAM,本文提出的IMCA方法推算出的位置与参考位置吻合较好。由试验结果可知:对准结束时刻IMCA方法(n=1)对纬度、经度的推算误差分别为0.004 5′、-0.004 9′;IMCA方法(n=2)对纬度、经度的推算误差分别为0.000 3′、-0.003 3′;OAM对纬度、经度的推算误差分别为0.041 3′、-0.075 7′. 因此,将IMCA方法应用到b系下动基座初始对准中是可行、有效的。
为了进一步验证IMCA方法的一般性,分别利用OAM和IMCA方法进行不同运动状态条件下的初始对准试验。定义IMCA方法的初始姿态对准误差εIMCA,att为不同积分次数条件下初始姿态对准误差εatt,n的平均值,
(32)
式中:下标att分别可表示俯仰角、横滚角和航向角;M为积分总次数,试验中选取积分次数n的变化范围为[1,5],即M=5;εatt,n为积分次数为n的条件下初始姿态对准误差。
通过初始对准试验及(32)式计算可知,在初始对准结束时,由数据段1~数据段6得到的初始姿态对准误差分别如表2~表7所示。
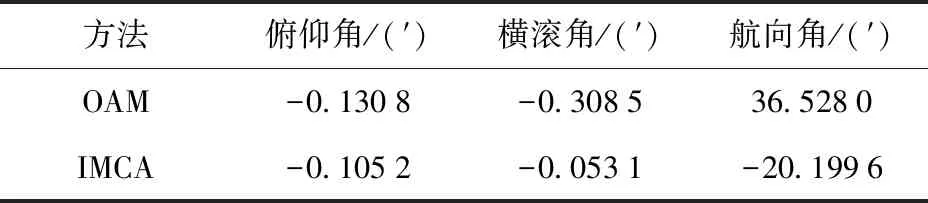
表2 数据段1的初始对准误差
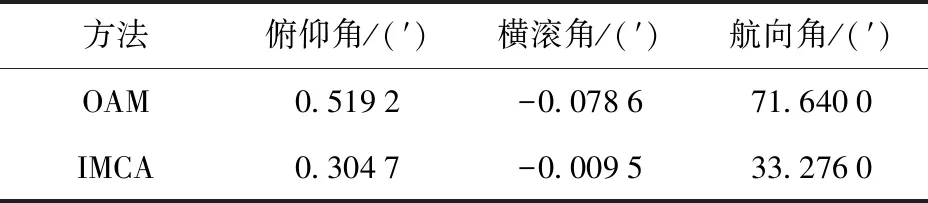
表3 数据段2的初始对准误差

表4 数据段3的初始对准误差

表5 数据段4的初始对准误差

表6 数据段5的初始对准误差
试验过程中,数据段1~数据段6对应的航向角基准和速度基准变化范围如表8所示。
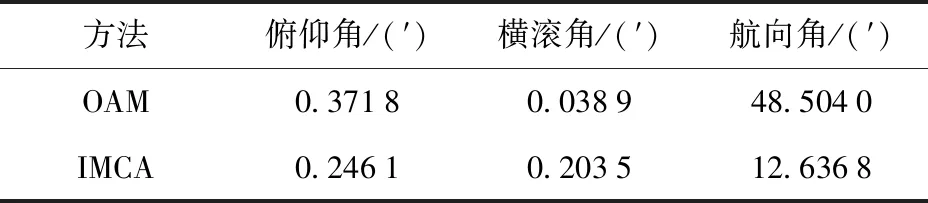
表7 数据段6的初始对准误差
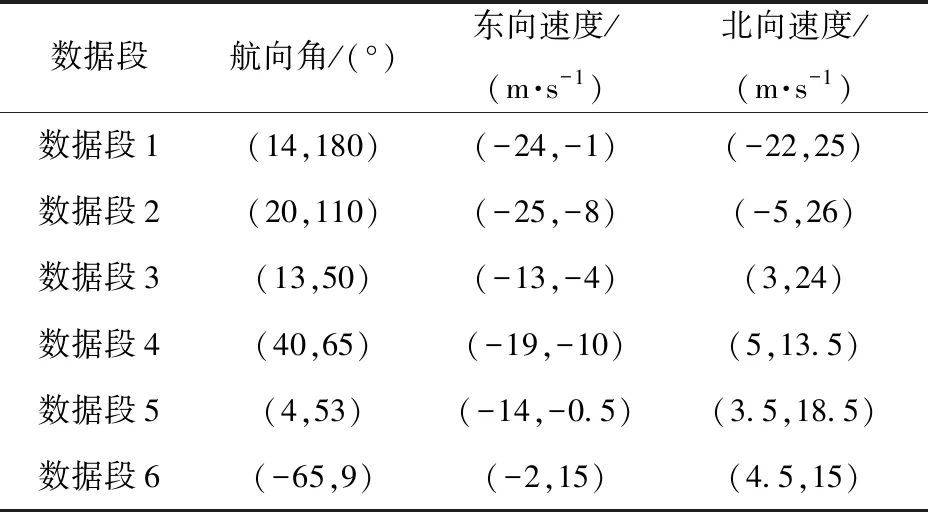
表8 数据段1~数据段6对应的航向角和速度
由表2~表7可知,利用IMCA方法进行b系下的动基座初始对准,其航向角对准精度明显高于OAM. 由表2~表7还可以看出,OAM对航向角的初始对准精度在某些数据段符合SINS精对准小失准角的要求(如数据段1、数据段3、数据段4和数据段6)。但是在某些特殊情况下,OAM并不能为SINS快速启动提供稳定、可靠的初始姿态角(如数据段2、数据段5对应的运动状态,OAM对航向角的对准误差均超过1°)。
由表8可以看出,数据段1~数据段6对应的机动状态差异较大。在对准过程中,针对不同的运动条件(数据段1~数据段6),利用IMCA方法对航向角对准误差的最大值为数据段2对应的航向角对准误差33.276 0′;利用IMCA方法对航向角对准误差的最小值为数据段4对应的航向角对准误差-4.023 4′. 由试验结果和表8可知,载车运动速度对航向角的对准精度有着较大影响。定义参数ρ为
ρ=(1-|ψIMCA|/|ψOAM|)×100%,
(33)
式中:ρ表示IMCA方法相比于OAM对航向角对准精度提升的幅度;ψ为航向角对准误差。通过对表2~表7中的数据进行计算,得到IMCA方法对航向角的对准精度相比于OAM对航向角的对准精度提升幅度如表9所示。
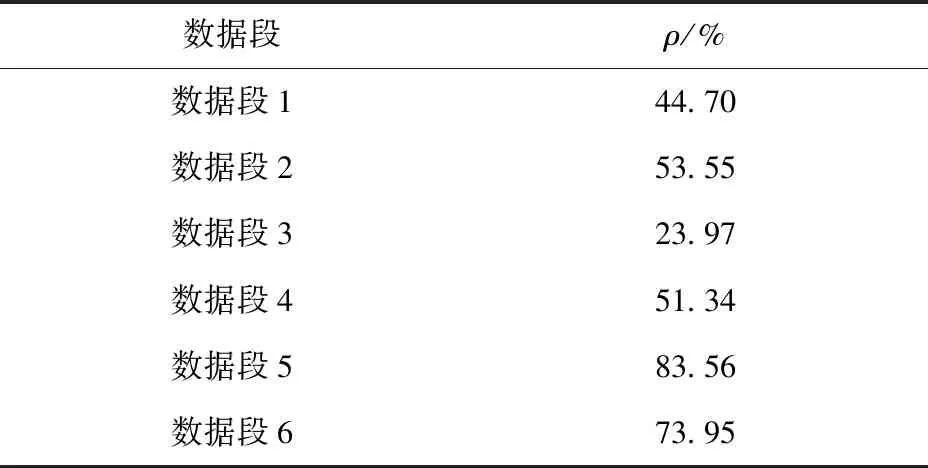
表9 IMCA方法相比OAM航向角对准精度提升幅度
由表9可知,在相同条件下,本文提出的IMCA方法相比于OAM具有更高的航向角对准精度。通过初始对准试验可知,相比于OAM,本文提出的IMCA方法在保证快速性前提下,有效提高了SINS动基座初始对准精度。
4 结论
本文提出了一种基于逆向导航算法的IMCA方法。通过在动基座对准中引入逆向导航算法,对存储的数据进行反复使用,从而提高动基座初始对准精度。在车载实测数据基础上,分别利用OAM和IMCA方法进行动基座初始对准试验。所得主要结论如下:
1)相比于OAM,IMCA方法可在保证对准快速性前提下,实现更加稳定、更高精度的初始对准。
2)IMCA方法对位置具有更高的跟踪精度,可有效解决粗对准快速性与精度之间相互矛盾的问题。IMCA方法应用于载体系测速辅助SINS动基座初始对准中是可行、有效的。