大视场高像质简单光学系统的光学-算法协同设计
2019-10-23郑云达徐明飞贾树强张晓菲卢勇男
郑云达,黄 玮,徐明飞,潘 云,贾树强,张晓菲,卢勇男
(1.中国科学院 长春光学精密机械与物理研究所,吉林 长春 130033;2.中国科学院大学, 北京 100049)
1 引 言
高像质、低成本、小型化相机在遥感测绘、安防、医疗等领域的需求日益增加。而对于光电成像系统而言,高像质与低成本小型化是相互矛盾的。如要满足高像质的需求,光学设计者们要在光学系统中加入多个镜片来校正像差,这就导致光学系统体积、重量、成本增加,难以满足低成本、小型化的需求。
近年来,不少研究者利用图像复原的方法校正光学像差,从而提高图像质量[1-4]。经典的方法有逆滤波法、维纳滤波法[5]、Richardson-Lucy算法[6-7]等,然而这些方法易受噪声影响,容易产生振铃效应,不能很好地去除光学像差。为了减轻噪声干扰,复原更多的图像细节,基于自然图像规律先验[8-10]和基于光学成像规律先验[11-12]的图像去卷积算法相继被提出。这些方法引入先验知识作为正则项,将病态的去卷积问题转化为良态问题,使恢复结果具有清晰图像的特性,同时抑制振铃效应。
Schuler等人[13]最早利用图像复原的方法简化光学系统,提出单透镜计算成像系统的概念。他们将前端的镜头简化为单透镜,利用相机拍摄了模糊图片后,最终通过图像复原算法有效地消除了像差模糊。Heide等人[14]提出了基于交叉通道先验的图像去卷积算法,大幅减弱了色差引起的模糊及彩边现象,并通过自制的单透镜相机获得了较高质量的图像。在国内,李卫丽等人[15]也通过计算成像原理实现了单透镜相机。王娇阳、谭政等人[16-17]提出了光学成像系统与图像处理系统的联合优化方法。崔金林[18]在单透镜成像技术中引入字典学习和卷积神经网络的方法,提升了点扩散函数的获取速度及单透镜相机的成像质量。
然而,大部分研究者选用的前端光学系统都过于简单,导致图像模糊程度大,信息丢失严重,难以复原出高像质图像。针对这一问题,本文提出了一种大视场简单光学系统的光学-算法协同设计方法。在图像复原算法方面,改进了空间变化的交叉通道去卷积算法,加入倍率色差校正,以确保图像复原算法在大色差情况下的有效性,显著地去除了色差带来的图像模糊。在光学设计阶段,由于算法可以明显减弱色差的影响,放开了色差的约束,并专注优化绿色通道的像质,使该通道成像锐利,从而在后期交叉通道去卷积算法中,更有效地帮助红、蓝两通道图像复原,实现高像质成像。本文利用该方法设计了一套仅由两片镜组成的大视场简单光学系统,系统焦距为50 mm,全视场为46°,F数为5.6,探测器分辨率为1 000万像素。该系统采用全球面设计,两片镜材料均为K9玻璃。
2 光学降质的图像复原算法
2.1 交叉通道去卷积算法
在光学系统中,镜头所成的模糊图像可以看成是真实图像与光学系统的点扩散函数(Point Spread Function,PSF)卷积的结果,成像模型可表示为:
y=k⊗i+n,
(1)
其中,y表示模糊图像,k表示光学系统的PSF,i表示真实图像,n表示系统噪声。根据模糊图像求取清晰图像的问题是一个去卷积问题。然而,去卷积是一个病态问题,会有无穷多解,需要引入适当的先验作为正则项,从无穷多解中选出最优的一个。
对于简单光学系统,由于存在较大的色差,不同颜色光的波长不同,焦距不同,其理想的聚焦位置也有很大差异。当像面处于某一颜色通道的理想聚焦位置时,其他颜色通道将出现严重的离焦,这就造成了彩边现象。Heide提出了交叉通道先验理论[14],即“物体的边缘会出现在红、绿、蓝3个颜色通道相同的位置”,利用聚焦的理想颜色通道所成的锐利图像,可帮助另外两个离焦通道的模糊图像复原,在消除轴向色差的同时,使复原效果明显提升。交叉通道先验可表示为:

(2)
其中,j和l表示两个颜色通道。
结合交叉通道先验,去卷积算法的最优化公式的矩阵形式可表示为:

(3)
其中,第一项为最小二乘法拟合项,第二项表示清晰图像梯度和二阶导数服从重尾分布,第三项是交叉通道先验。公式中,H{1,2}表示计算一阶导数的卷积矩阵,H{3…5}表示计算二阶导数的卷积矩阵,λc和βcl∈R分别是图像先验与交叉通道先验的权重。上述优化问题可由原始对偶算法解出[19],此处不赘述。
2.2 空间变化方案
传统的图像复原算法一般认为PSF是空间不变的,即PSF在全视场内是一致的。然而,光学系统的点扩散函数是随着视场的变化而变化的。图1(a)(彩图见期刊电子版)展示了一个两片镜简单光学系统各视场的PSF分布图。可见,随着视场的增大,PSF在形状和强度分布有着明显的变化,但是对于两个相近的视场,PSF的差异又很小。

图1 空间变化方案示意图 Fig.1 Diagram of the space-variant strategy
针对光学系统PSF的空间变化特点,本文使用一种矩形重叠分块的办法,如图1(b)(彩图见期刊电子版)所示。将模糊图分成重叠的矩形小块,并假设在每个分块内,PSF空间不变。每个分块分别进行去卷积计算后拼接得到复原图像。
对于PSF在分块内具有一致性的假设会产生边界误差。故本文在边界重叠区域使用线性过渡方式,以有效减轻边界误差。引入了增益因子G,在图片的非重叠区域,增益因子G是常数1,在重叠区域,它会线性下降直至分块边界处,变为零。如图2所示(彩图见期刊电子版),G1和G2分别是两个相邻分块Patch 1和Patch 2的增益因子,它们重叠区域的图像ioverlap是两个分块图像的线性混合:
ioverlap(x,y)=G1(x,y)·ipatch1(x,y)+
G2(x,y)·ipatch2(x,y) ,
(4)
其中,x和y是所计算像素的坐标。

图2 图片分块重叠部分的拼接示意图 Fig.2 Diagram of stitching method of image overlapping parts
2.3 倍率色差的校正
倍率色差广泛地存在于光学系统中,尤其是大视场光学系统。当存在倍率色差时,对于轴外同一物点,光学系统在红、绿、蓝三通道的成像位置会存在明显差异,导致三通道图像中物体的边缘发生错位。尽管交叉通道去卷积算法可以有效消除轴向色差,但当光学系统存在较大倍率色差时,交叉通道去卷积算法将会失效。
图3(彩图见期刊电子版)为交叉通道先验的示意简图,图中横坐标为像素的位置,纵坐标为像素灰度值。如图3(a)和3(b)所示,当系统不存在倍率色差或倍率色差很小时,交叉通道先验可以使模糊通道的边缘更加锐利。如图3(c)和3(d)所示,当倍率色差很大时,红色和蓝色通道的边缘与绿色通道边缘的位置会发生严重偏离,导致交叉通道先验失效。因此,本文在交叉通道去卷积前,引入倍率色差校正,以减弱三通道图像边缘的分离程度,保证交叉通道先验的有效性,如图3(e)、3(f)和3(g)所示。

图3 交叉通道先验示意图 Fig.3 Scanline diagrams of cross-channel prior
倍率色差实际上是由不同波长的光畸变程度不同导致的,将不同颜色通道图像的实际像点拉伸或收缩至同一波长(如绿光)的近轴像高位置,即可校正倍率色差。
倍率色差呈旋转对称分布,带有倍率色差的光学系统中,物点的实际像高和近轴像高的关系可用下列多项式近似表示[20]:

(5)
其中,rj表示校正前颜色通道j的物点的实际像高,rcorr表示物点某一波长光(如绿光)的近轴像高,a、b和c是多项式的系数。
本文以绿光的近轴像高为校正标准,对公式(5)中的多项式进行拟合,并校正倍率色差,步骤如下:
(1)使用光学设计软件提取系统的绿光畸变信息和倍率色差信息。
(2)根据畸变和倍率色差信息计算三色光的实际像高与绿光的近轴像高,并结合探测器像元尺寸,将像高转化为像素数。
(3)使用最小二乘法分别拟合求取3种色光的多项式系数。
(4)计算校正后图像的每一个像元到图片中心的距离,作为该点的近轴像高像素数。将近轴像高的像素数代入多项式求取实际像高的像素数。
(5)步骤(4)中求取的实际像点位置可能会出现亚像素情况,本文使用双线性插值的方法估计该位置的灰度值,并将其替换至校正后图像对应的像素位置。
校正色差后,模糊图像被拉伸,因此,在去卷积前,所使用的PSF也应根据公式(5)拉伸。本文将空间变化的PSF按实际成像位置置于一幅空白图片中,形成PSF阵列图。然后使用前文所述的校正倍率色差的方法对PSF阵列图进行处理,以实现PSF的拉伸。
3 简单光学系统设计

图4 简单光学系统结构图 Fig.4 Layout of simple optical system
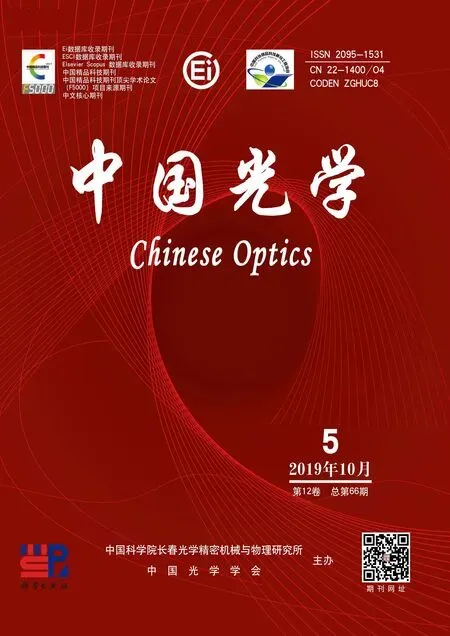
目前,在简单光学系统成像技术的研究中,学者们广泛使用的是只含一片平凸透镜的单透镜系统,该系统分辨率低,像质差,而且随着视场角的增加,单透镜的场曲会显著增长,如图4(a)所示。边缘视场的点扩散函数变得太大会导致信息丢失严重,很难成功复原边缘视场的图像。因此,单透镜系统的视场也受到了严重的限制。
为了获得更大的视场和更高的分辨率,本文采用一个由两片对称的弯月透镜组成的系统作为初始结构,如图4(b)所示。这个结构对于轴外像差有良好的校正效果,全视场的PSF都很容易控制在合理的尺寸内,这样有利于图像算法复原高质量图像。
由于前面描述图像复原算法可以显著地消除色差,本文在优化过程中利用多重结构的方法进行优化,放开色差的约束,并增加绿色波长的权重,使绿色通道的成像质量比普通光学系统更加锐利,保留更多信息,便于图像恢复。同时,没有了色差的约束,PSF的尺寸也更容易控制。为了进一步降低系统的成本,本文只使用HK9L玻璃作为镜片的材料。
本文的设计结果如图5所示。系统焦距是50 mm,全视场46°,F数是5.6。镜头参数见表1。可以看到绿色通道的弥散斑非常小,尽管系统的倍率色差很严重,但是红、蓝两个模糊通道的弥散斑的尺寸也得到了很好的控制。
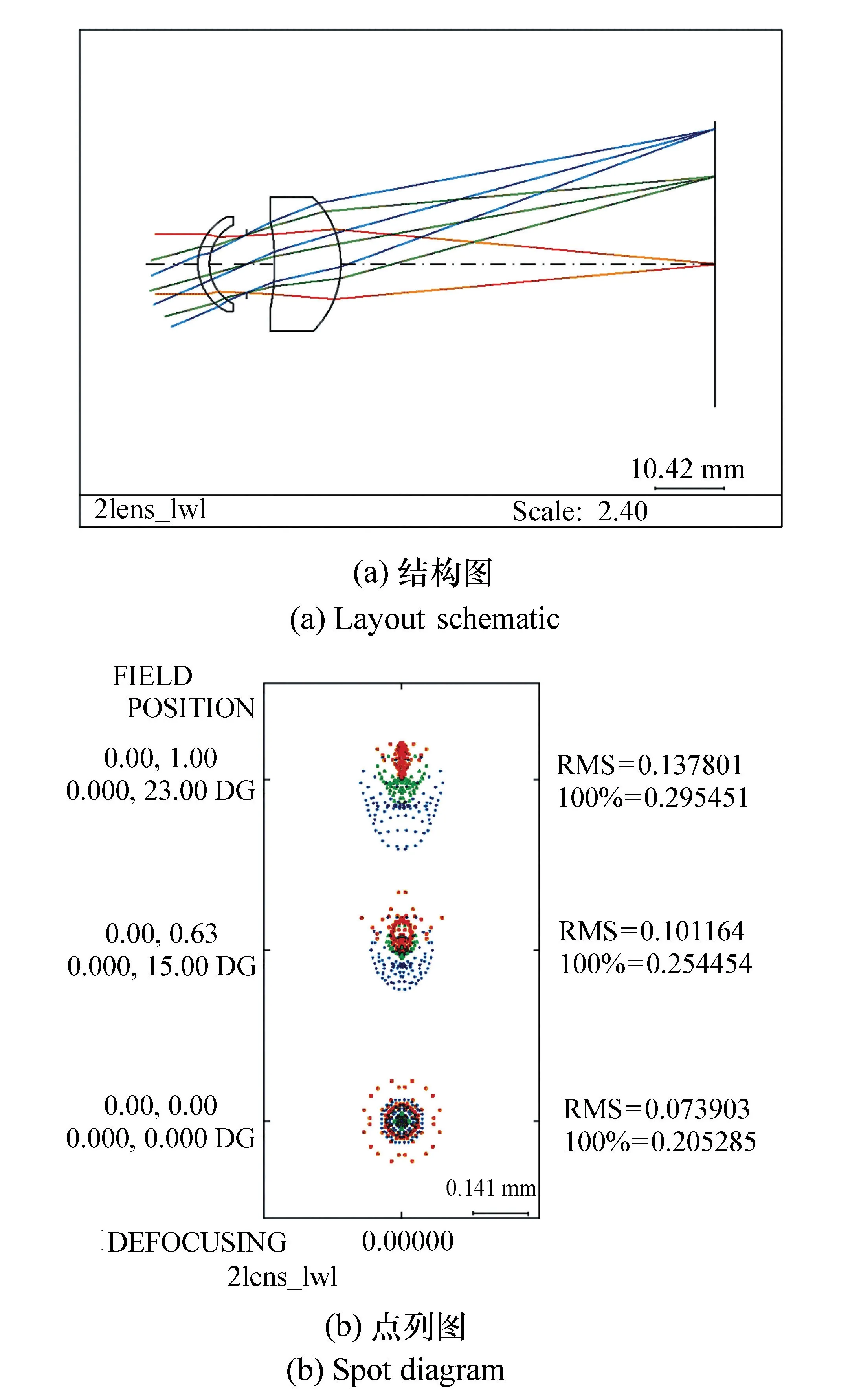
图5 简单光学系统设计结果 Fig.5 Designed results of simple optical system

表1 简单光学系统的镜头参数
4 实验与结果
为了测试大视场简单光学系统的成像质量,本文利用CODE V软件的成像模拟功能获得光学系统的成像结果,再用图像复原算法对模糊图进行复原。本文还获取了库克三片式镜头和两种纯图像复原算法方案的结果,并与本文的结果做了定量比较。
4.1 仿真实验测试
首先,使用高像质相机拍摄现实中的场景作为原始清晰图片,图片分辨率是3 840 pixel×2 560 pixel,约为1 000万像素。然后,使用光学设计软件CODE V仿真生成光学系统所成的模糊图像。本文所使用的空间变化的PSF同样是通过CODE V软件仿真的方法获取的,如图6所示。
图6 简单光学系统的空间变化PSF Fig.6 Space-variant PSFs of the simple optical system
在MATLAB上使用本文图像复原算法对模糊图像进行复原,模糊图像与复原图像的对比结果见图7。可以看到,本文图像复原算法可以有效去除光学系统的倍率色差,图像边缘视场的彩边现象明显减弱。同时,复原结果展示了更多的图像细节信息,边缘锐利,清晰度明显提高,无论是边缘视场还是中心视场都没有出现振铃效应。实验结果表明,使用本文提出的光学-算法协同设计方法设计出的大视场简单光学系统能够获得高像质、高分辨率的图像。

图7 图像复原结果 Fig.7 Image restoration results
4.2 结果对比
首先,将本文提出的方法与Krishnan[9]和 Heide[14]的两种纯图像复原算法的解决方案进行了对比。纯算法方案对于光学系统没有特殊优化,因此,采用常规方法为这两种方案设计了一个两片镜的光学系统,其与本文方案具有相同的初始结构、孔径、焦距、材料和视场。在优化过程中,为了同时校正色差与场曲,常规设计系统后面的镜片变得很大,并且靠近像面。考虑倍率色差也会使系统对其他像差妥协,导致弥散斑增大。常规系统的设计结果及PSF如图8所示。可以看出,与本文的系统相比,常规系统的倍率色差虽然很小,但是PSF的尺寸却更大了。

图8 常规设计的两片镜系统 Fig.8 Conventional designed two-lens optical system
两种纯算法解决方案都采用了与本文相同的分块方法,复原结果见图9、图10。可以看出,Krishnan和Heide的两种纯算法解决方案复原结果非常模糊,信息丢失严重,分块边缘出现明显的不自然的竖直彩色条纹。而本文的结果由于在设计系统时忽略了倍率色差,PSF更小,像质明显优于Krishnan和Heide的解决方案,保留了更多的细节和信息,良好地抑制了彩边效应和振铃效应。

图9 鲜花图像复原结果对比 Fig.9 Comparison of restoration results of a flower image

图10 校园图像复原结果对比 Fig.10 Comparison of restoration results of a campus image
为了定量评价图像质量,本文使用了两种无参考图像评价方法,盲/无参考图像空间质量评价法(Blind/Referenceless Image Spatial Quality Evaluator,BRISQUE)[21]和自然图像质量评价法(Natural Image Quality Evaluator,NIQE)[22]。BRISQUE用局部归一化亮度系数的场景统计来量化图片自然性的损失,NIQE估计了被测图片与自然图片在统计规律上的可测偏离。两种方法的评价结果见表2和表3,分数越低表示像质越好。从数据结果来看,本文复原图像的定量评价指标明显优于Krishnan和Heide的解决方案。

表2 BRISQUE评价结果对比
注意,由于本文使用的是大视场光学系统,存在一定的畸变,因此不能采用峰值信噪比(PSNR)和结构相似度(SSIM)这类全参考的像质评价方法。

表3 NIQE评价结果对比
本文还将复原结果与光学结构更为复杂的库克三片式镜头的成像结果进行了对比,结果见图9、图10。所选用的库克镜头与本文设计的简单光学系统具有相同的孔径、焦距和视场。但相比于本文设计的大视场简单光学系统,库克镜头的镜片数量更多,并且使用了3种不同的玻璃材料。库克镜头的结构和PSF见图11,可以看出库克镜头像质非常出色,其PSF在各视场都很小,几乎是一个点。

图11 库克三片式镜头 Fig.11 Cooke triplet lens
从视觉上看,两种结果都很清晰,图像自然,细节丰富。本文的结果虽然存在轻微的彩边现象,但是具有更高的对比度,像质可以媲美库克镜头。从表2、表3中的定量评价数据也可以看出,本文的结果接近于库克镜头的结果。
5 结 论
本文提出了一种大视场简单光学系统的光学-算法协同设计方法。在算法方面,针对大视场光学系统的成像特点,采用交叉通道先验,去除图像的倍率色差,给出了空间变化的图像复原算法。在光学设计方面,忽略了色差的约束,专注于单一颜色通道的像质优化,使系统得到的模糊图更有利于图像算法复原。最终,设计了一个由两片镜组成的大视场简单光学系统。实验结果证明:配合图像复原算法,本文所设计的大视场简单光学系统能够获得高分辨率、高像质图片,有效地保留了图像的边缘细节,抑制振铃效应,成像质量明显优于纯图像复原的解决方案,媲美库克三片式镜头。