基于新能源复合能源动力系统的小型无人机总体仿真设计
2019-10-23余彬,邓浩,马琪,贺翔
余 彬,邓 浩,马 琪,贺 翔
(北京耐威科技股份有限公司,北京100029)
0 引言
随着无人机技术在各行各业的普及,不管是航测巡线,还是消防救援、环境侦察等等领域,小型无人机的重要性日益凸显[1],军用、民用市场上也产生了对无人机性能与航时的更高要求。高效率无人机动力系统因此成为技术更新的焦点之一。
采用太阳能电池、燃料电池和锂电池组合成新能源复合动力系统,能够充分发挥各种能源形式的优点,获取更大的能量密度与放电倍率,延长无人机续航时间,降低维护保养成本。戴月领等人对燃料电池无人机的发展现状进行了分析,指出了高效燃料电池的研制与应用、氢气的储存技术、燃料电池与蓄电池的混合技术及其能量管理控制技术为其亟待解决的技术难点[2]。杜孟尧对太阳能/氢能混合动力无人机进行了研究,并针对其设计过程中存在的重量、能量之间的耦合问题,提出了一种基于功率匹配、重量平衡和能量平衡的总体参数设计方法[3]。
本文针对小型长航时固定翼无人机总体技术指标要求,设计一款基于新能源复合能源的小型无人机,对部分关键参数的设计和总体布置进行介绍,并计算无人机性能特点。
1 总体方案设计
与常规固定翼无人机设计相比,同时使用了太阳能、燃料电池和锂电池组的无人机需要考虑到太阳能电池和燃料电池气瓶的共形设计,以及2+1的冗余能量控制策略。三种能源型式组合后,比能量和比功率均都发生变化,对无人机的续航时间、飞行速度、爬升率、升限等产生直接影响,使得无人机总体参数设计对复合能源动力系统产生很强的依赖性。
1.1 总体技术指标要求
所设计的无人机起飞重量18 kg,搭载最大1.5 kg任务载荷,可持续飞行16 h以上。整机设计巡航海拔1 000 m,巡航飞行速度72 km/h,最大飞行速度110 km/h,具备双发冗余动力,能够满足我国大部分平原地区使用需求。
1.2 推重比与翼载荷
1.2.1 推重比
本文从统计值,最大飞行速度进行推算,综合得出初步的无人机推重比数值。
从统计值推算,该款机型属于具有长航时特点的小型工业无人机,推重比介于自制飞机0.08 hp/lb和通用航空(双发)0.17 hp/lb之间,考虑到长航时无人机不需要过多机动,可以暂取推重比为0.11 hp/lb。
按照起飞重量18 kg=39.68 lb的指标要求,计算可得:


其中,a和c为经验常数,可以通过查表所得。按照最大飞行速度110 km/h=59.39 kts、起飞重量18 kg=39.68 lb的指标要求,分别作为自制飞机-复合材料和通用航空(双发)计算,并取其平均值,得到:

资料表明,该指标与同级别的美国“扫描鹰”无人机近似,但本机双发动机带来的动力富裕程度稍高。
1.2.2 翼载荷
本文的翼载荷估算从失速速度、续航时间、起飞距离等三个方面进行综合估算。
通过失速速度的翼载荷估算公式:

其中,W为整机重量,S为机翼面积,ρ为空气密度,vS为失速速度,CLmax为最大升力系数。
无人机设计不含襟翼,取CLmax典型值为1.3,设计失速速度参考国内类似的工业级无人机产品取54 km/h(15 m/s),空气参数为海拔1 000 m时大气的空气参数,代入公式可以得到翼载荷为:
通过续航时间的翼载荷估算公式[5]:

对整流好的螺旋桨飞机CD0近似为0.02。巡航状态下奥斯瓦尔德因子e取0.8,巡航速度v=20 m/s。
代入公式计算可得:

通过起飞距离进行估算,根据螺旋桨飞机经验公式以及升力方程[5]:

由公式(5)可知,飞机起飞速度vTO取1.1倍失速速度时,起飞升力系数CLTO为最大升力系数CLmax除以 1.21,这里取 1.074 4。空气密度比 σ 为取 1。起飞推重比取0.087。设计起飞距离TOP限制在200 m。
计算可得:
综合上述结果,初定翼载荷为16.59 kg/m2。
1.3 无人机总体布局设计
新能源长航时无人机总体布计涉及到机翼主要参数设计与无人机整体构型的布置,无人机整体构型布置中,兼顾考虑新能源动力系统、机载设备的安装布置及无人机整机的使用性是复合能源无人机的设计重点。
1.3.1 机翼形状设计
(1)展弦比A
参考长航时无人机展弦比与续航时间拟合公式[6]:

其中,A为展弦比,T为续航时间。
考虑到无人机设计航时超过16 h,通过公式计算展弦比最低应为13.19,为保留航时余量对展弦比取整为14。
(2)梢根比η
根据太阳能1.2.2节计算结论,无人机翼载荷为16.59 kg/m2,翼面积约为 1.085 m2。由机翼展弦比 14,计算可得平均气动弦长MAC=278 mm。
对于梯形翼,MAC与翼尖、翼根弦长之间的关系如下:

其中,br为翼根弦长,bt为翼尖弦长。
由公式计算可得,翼根弦长为349 mm,近似取350 mm。
由机翼面积计算可得机翼半展长为2 m,梢根比为0.548 6,偏离低速直机翼诱导阻力最小的0.35,需要通过后期气动优化降低诱导阻力。
(3)平面尺寸
综合上述计算,可以得到无人机机翼平面参数如下表1所示。

表1 机翼平面参数
1.3.2 整体布局设计
无人机采用近圆柱形机身、上单梯形翼常规布局,具备前三点起落架,两个螺旋桨电推进系统分别位于机头和机尾,载荷吊装在机体下部。见图1。

图1 无人机总体布局
根据燃料电池组成特点,对机身采用复合材料硬壳式蒙皮设计,燃料电池气瓶与机体结构共同形成机身中段,电堆与设备舱位于机体前部。机头和机尾分别安装两个无刷电机,用于驱动螺旋桨转动。
机翼采用可拆设计,通过螺钉安装在机体上方平台。太阳能电池集成后通过热压方式粘接在机翼表面,考虑到太阳能电池的使用要求,机翼通过模具整体成型,翼型上部曲率变化平缓,翼尖不带几何扭转。尾翼为常规布局,通过插接结构进行拆卸。
全机从结构上可以分为机翼、机身、垂尾、平尾等几大部分,拆装方便,利于快速使用。
1.4 能源复合系统
新能源复合动力系统能源包含氢燃料电池、太阳能、锂电池三种能源,在无人机不同飞行阶段、面对不同的环境合理搭配不同能源为无人机提供动力,在相同气动布局的情况下就可以显著增加无人机续航时间,发挥新能源复合动力系统最大效能。
1.4.1 复合能源电源管理系统
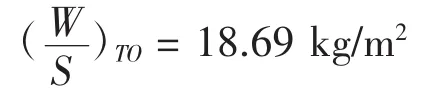
新能源复合动力系统电源管理分系统包括电源管理模块和电源管理软件组成。电源管理模块主要根据飞行阶段和风速环境因素智能切换不同能源供能。电源管理模块工作方式分为两种:
(1)自动模式:在自动模式下不需电源管理软件干预,电源管理模块会根据飞控提供的测控信息自主判断当前飞行阶段、状态以及风速等环境因素,自动切换不同能源供能。
(2)手动模式:在手动模式下,电源管理模块根据电源管理软件手动发送的飞行阶段、是否需要抗风等信息切换不同能源供能。
两种模式下电源管理软件都会解析显示电源管理模块下发的遥测信息,如2号电机电压、电流、功率、锂电池电压等。
系统组成框图如图2所示。
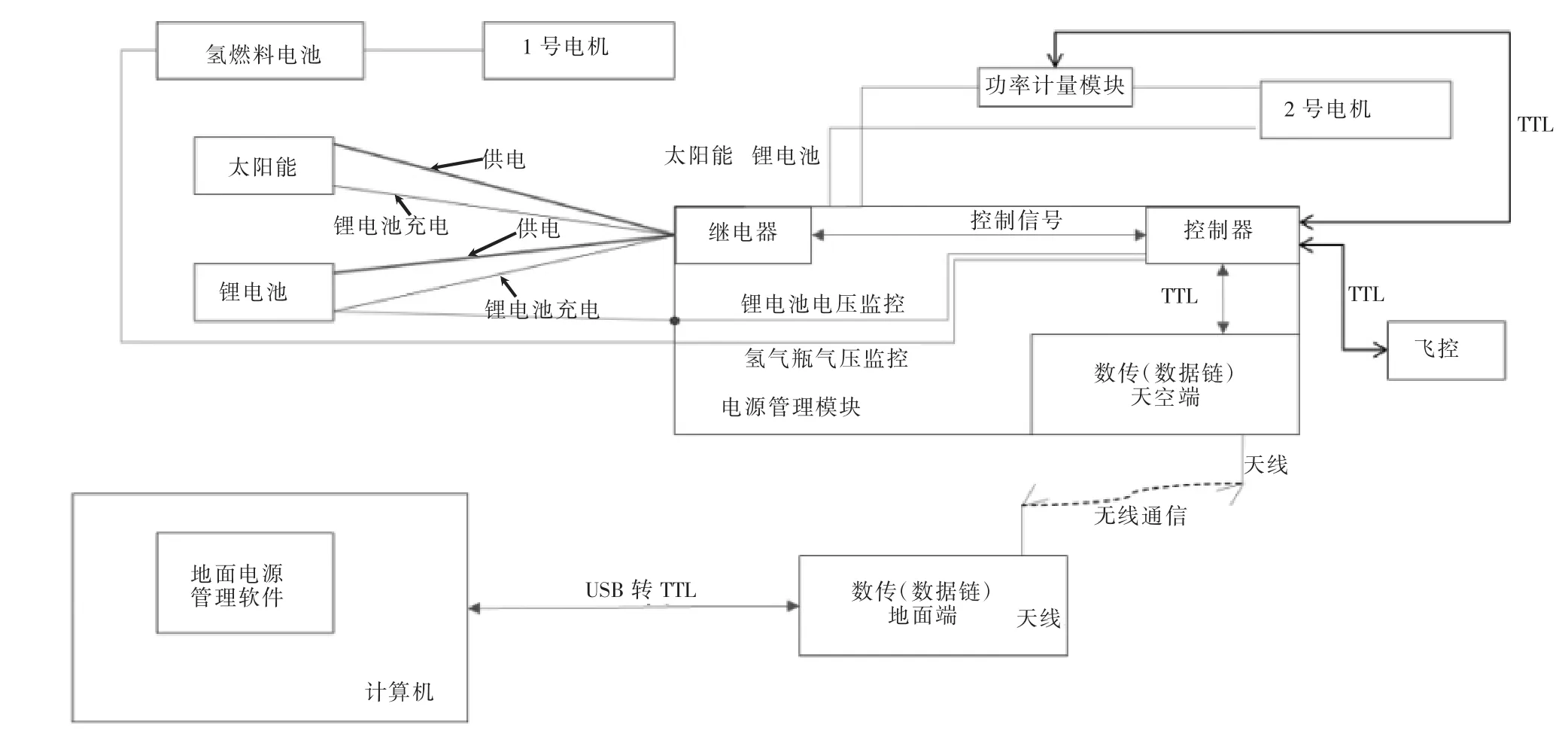
图2 电源管理分系统组成
电源管理软件负责向机载端电源管理模块发送电源管理信息号,机载端电源管理模块收到请求信息后返回确认信息然后开始切换能源。目前具备能源切换、当前能源状态显示及当前飞行状态显示等功能。电源管理软件以串口方式与机载电源管理模块连接。见图3。
图3 电源管理软件界面图
电源管理软件支持手动和自动切换能源。手动控制切换能源通过四个控制按钮发送控制指令。电源管理所用的四个控制指令如下:
(1)起飞:用于在飞机起飞时发送控制指令给电源管理模块,指令发送后,机载端电源管理模块返回确认信息,2号电机电压和功率信息以仪表盘的方式显示。由无人机起飞过程中需求能量较大,这时氢能源和锂电池同时工作。
(2)平飞:用于在飞机到达飞行高度进行续航时使用。进入平飞阶段后,由于需求能量较平稳,这时只有氢能源在对无人机进行供电,机载端电源模块对锂电池电流进行判断,如果低于额定值,那么将启用太阳能对锂电池进行充电,锂电池充电饱和后自动断电,停止对锂电池的充电。
(3)机动:用于在飞行遇到一些特殊情况,如强风,需要加强动力时使用。这种状态类似起飞状态也是锂电池和氢能源同时工作,对无人机飞行提供强力能源保障。
(4)降落:飞机进入降落阶段使用。降落阶段需求能源减少此时只有氢能源独立为无人机提供能源,使无人机完成降落操作。
自动控制模式是由电源管理模块根据能源及飞行情况自动判断切换能源。进入自动控制后,起飞、平飞、机动、降落这四种手动指令无法使用,能源控制由机载端电源模块自行控制。
1.5 气动性能仿真
小型长航时无人机的典型设计工况如下:巡航海拔1 000 m,巡航速度72 km/h。环境条件参照国际标准大气,取外界气温 8.5 ℃,气压 89.875 8 kPa,空气密度 1.111 68 kg/m3,动力粘度系数 1.757 8 Ns/m3。
通过流体仿真软件对无人机气动特性进行评估,使用ICEM对无人机整机划分网格,网格数量为1592万,之后将划分好的网格导入fluent中进行计算,湍流模型采用S-A模型,边界条件为速度进口和压力出口。对无人机不同攻角下的气动特性进行计算分析,计算后可以得到无人机气动特性曲线如图4~7所示。
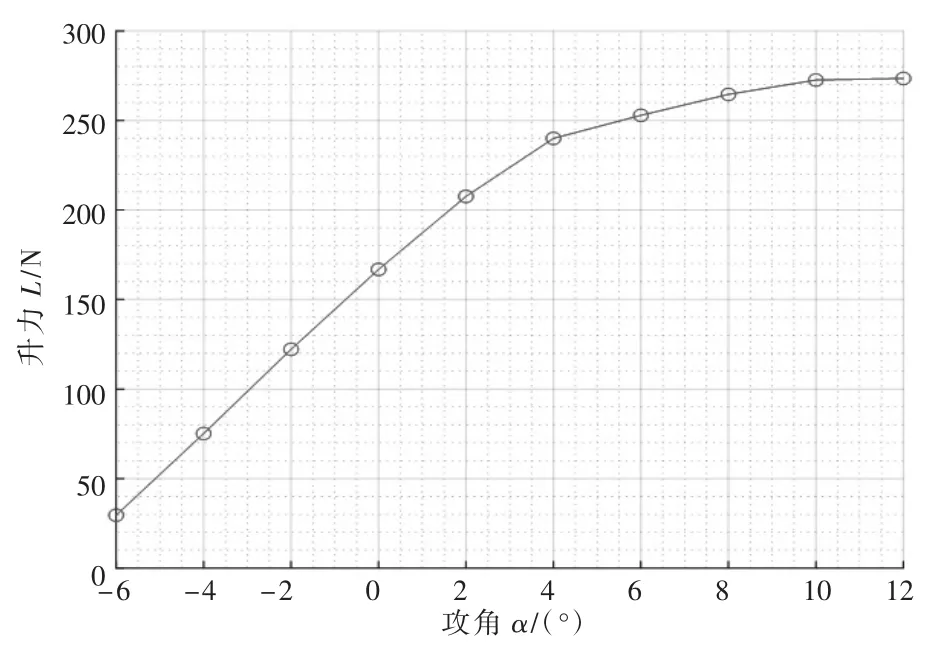
图4 无人机升力特性

图5 无人机阻力特性

图6 无人机升阻比特性
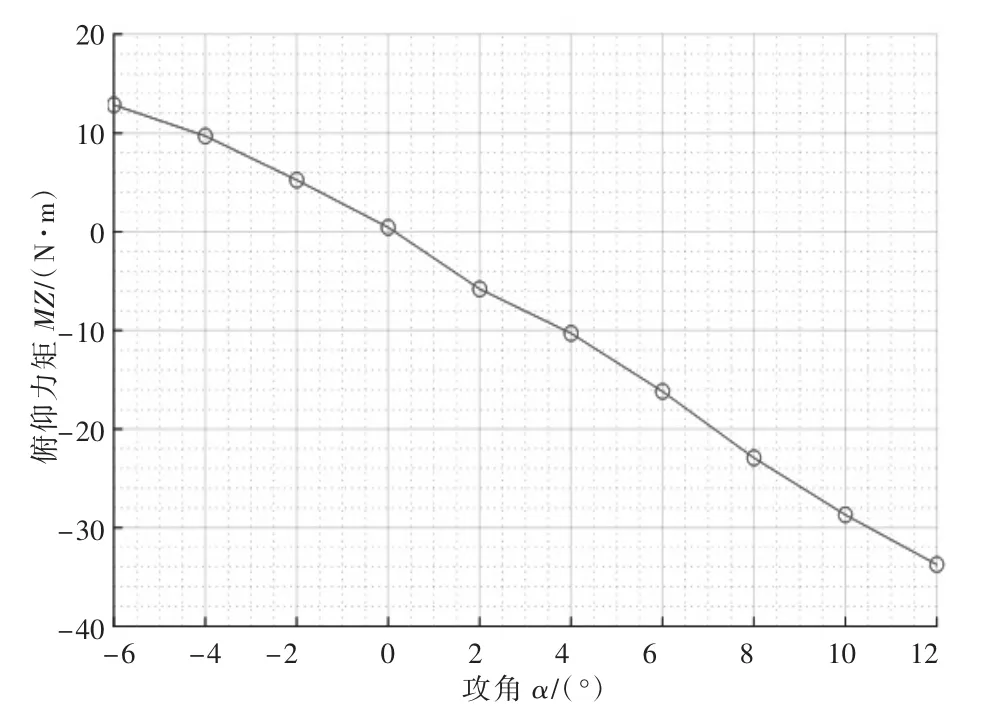
图7 无人机俯仰力矩特性
其中,图4显示了飞行器升力随迎角变化的情况,在0°迎角处附近升力近似为18 kg,满足无人机巡航升力要求。随迎角增大升力逐渐增加,在12°左右开始降低进入失速。图5显示了飞行器阻力随迎角变化的情况,阻力在小迎角条件下维持较为缓慢的增涨,4°以后开始较大幅度增加。图6显示了飞行器升阻比随迎角变化的曲线,可以看出最大升阻比出现在平飞0°迎角附近,数值为20.69。图7显示了飞行器对重心位置俯仰力矩随迎角变化的曲线,可以看出在0°迎角时无人机俯仰力矩近似为0。俯仰力矩曲线斜率为负,表明整机处于纵向静稳定状态。
1.6 续航性能计算
1.6.1 机载功耗估算
根据气动计算结果和无人机总体技术指标要求,无人机设计巡航速度V=72 km/h,巡航升阻比L/D=20.5,巡航时取螺旋桨效率 η1=0.7,无刷电机效率 η2=0.85,电机驱动器效率 η3=0.85。
根据经验公式:
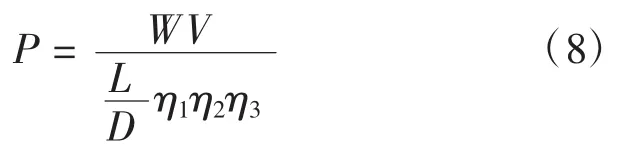
可以得到巡航所需动力系统功率P=340 W,考虑到预留机载设备功耗60 W(任务载荷、飞控、数据链路等),则全机功耗约为P=400 W。
1.6.2 复合能源动力系统容量
机载复合能源动力系统包括太阳能电池、氢燃料电池和锂电池,为2+1的冗余电源配置。其中,太阳能电池在光照充足的情况下持续为无人机供电,氢燃料与锂电池容量固定。锂电池只在其他两种电源功率不能满足无人机正常使用时参与供电。
(1)太阳能电池
沿机翼展向布置40块太阳能电池,单块电池功率3.7 W,合计发电功率P1=148 W。
(2)氢燃料电池
在太阳能电池参与供电的情况下,整机当量功率P0=P-P1=400 W-148 W=252 W。所选电堆对氢气消耗速度67.425 g/kWh,飞行16 h共需要消耗氢燃料4 032 Wh,合计272 g。
在太阳能电池不参与供电的情况下,整机当量功率P0=P=400 W,飞行16 h共需要消耗氢燃料6 400 Wh,合计 431.52 g。
为满足航时需求,按照氢燃料基本储量431.52 g进行设计。
随着航时与需求功率要求的增加,飞行过程中氢燃料持续消耗将导致无人机重量出现不同比重的下降,对复合能源(含氢燃料)无人机航时T的估算可以参考Brequet航时公式。

其中,巡航升阻比取20.69;g为重力加速度;W1为无人机空重取17.56848 kg;W0为无人机总重取18 kg。
考虑无光照的情况,氢燃料消耗速率为67.425*252/1000/1000=0.026 97 kg/h,sfc 取为 0.003 163 318 kg/N*h;计算可得无人机续航时间为16.195 h。
考虑光照充足的情况,氢燃料消耗速率为67.425*400/1000/1000=0.017 kg/h,sfc 取为 0.001 993 934 24 kg/N*h;计算可得无人机续航时间为25.69 h。
(3)锂电池
锂电池为备用电池,总容量222 Wh,最大输出功率3 420 W。
锂电池对无人机续航时间最大增益为222 Wh/400 W=0.555 h,最小增益为0h(纯用于机动动作)。
综合上述分析,无人机气动与复合能源设计能够满足无人机长航时使用要求,无人机最大航时为25.69 h+0.555 h=26.245 h,最短航时为 16.195 h。
2 结束语
本文以新能源复合能源动力系统为基础,开发一款小型长航时固定翼无人机。设计方案兼顾考虑各新能源模块的使用安装方式,并对总体气动性能进行仿真计算。结果表明,无人机在72 km/h设计速度下,最大升阻比达到20.69,续航时间能够满足≥16 h使用要求。该设计可有助于同业新能源复合能源无人机的设计开发工作。
