Research and Simulation of Navigation Control System for Agricultural Unmanned Rotation Rotorcraft
2019-10-22MaChenmingSuZhongbinandZhangZongxin
Ma Chen-ming, Su Zhong-bin, and Zhang Zong-xin
College of Electronic and Information, Northeast Agricultural University, Harbin 150030, China
Abstract: In order to improve the efficiency of field operations, such as pesticide spraying and pest control, the development of new agricultural machinery has become the main goal of agricultural modernization. At present, small unmanned aerial vehicles (UAVs)have achieved good results in small area pesticide spraying, but they still do not meet the requirements of the big field operations.The rotation rotorcraft has the characteristics of low speed, good safety, super stol, strong endurance, strong wind resistance and simple mechanism, so it is very suitable for farmland operation. But at present, there are relatively few researches on the unmanned rotation rotorcraft at domestic and abroad, and there is no mature control theory system of unmanned rotation rotorcraft. Therefore,in order to solve the problem of navigation control system of unmanned rotation rotorcraft, the navigation control strategy of the rotation rotorcraft was studied in this paper, and the flight control strategy of the rotation rotorcraft was divided into two parts, the linear control and the turn control. The lateral correction strategy was used to control the rotorcraft, so as to complete the track guidance of the rotation rotorcraft. Using the matrix laboratory (MATLAB) modeling to simulate the circular trajectory and the serpentine trajectory,the maximum deviation of circular path offset was 1.1 m. The variance between the path angle and the given path angle was 6°. The maximum deviation of serpentine path offset was 0.6 m. The variance between the path angle and the given path angle was 8°. The simulation results showed that the rotorcraft could accomplish the scheduled trajectory task based on this control strategy.
Key words: rotation rotorcraft, turn control, deviation angle control
Introduction
Rotorcraft has a history of more than 100 years.At present, many countries in the world have applied it in the fields of military, agriculture and commerce. Most of them are in the United States,Sweden, Japan and Italy. The unmanned aerial vehicle (UAV) poccupancies of the United States was 70% of all the world. A new type of rotorcraft developed by the National Aeronautics and Space Administration (NASA) can take off almost vertically within 30 m high. After reaching the height of 23 m,the rotorcraft's speed can be accelerated from 0 to 80 km · h-1within only 5 s, then cruising at 270 km · h-1.In the course of landing, it can land vertically without a runway. Sweden had developed the westland sea military king three (MK3) rotation rotorcraft dwarf unmanned aerial vehicles which were equipped with the Swedish Army. The aircraft is mainly used for short-range surveillance. The whole machine mass is only 100 kg. The maximum load is 20 kg. The level flight speed can reach at 150 km · h-1. The minimum flight speed is 20 km · h-1. The control distance is 75 km.Its life time is about 3 to 5 h. The machine is mainly used as an investigation, carrying a number of smallscale detection equipment. The advantage of the MK3 is its flexibility without any take-off and recovery equipments (Liu, 2012; Zhao and Han, 2012).
The civil aircraft market is also constantly expanding. Because of its low cost, simple structure and high reliability, the rotorcraft has gradually entered the civil aviation market of China (Gordon, 2004). But fans of the rotorcraft designed to stay on the single rotorcraft.The number of large, heavy-load rotorcrafts is still very small. American Ryan Brothers Aviation Industry Company and Guangzhou City SanChuan Aviation Technology Company jointly created a rotorcraft production enterprise (Huo and Zhu, 2013). As the world's largest manufacturer of rotorcraft, the Sparrow Hawk rotorcraft designed by Ryan Brothers has high reliability, good stability and has begun to be saled to China and the whole world. The SanChuan Company has been developing based on combining with the Ryan Brothers. It is expected to launch their own lightrotorcraft four within the next few years (Chen, 2012).
In academic research, the domestic universities and research institutions have no greater interest in the rotorcraft (Guo and Song, 2015). It is understood that the Professor Gao Zheng of Nanjing University of Aeronautics & Astronautics led his own research group to conduct some studies on the rotorcraft.Professor Gao's research group had carried on the application design researches of the rotorcraft from the military and the civil two aspects. The experience accumulated in the design process contributes a lot for the development of China's rotorcraft technology (Chenet al., 2011).
In agricultural application field, the rotorcrafts in China market still mainly come from the rotorcrafts imported abroad for improving and processing at present (Garcia, 2015). Importing countries are the United States, the Netherlands and some other countries. The number of large rotorcraft in the domestic market is still extremely small and the unmanned rotorcraft filed is completely blank. Of course, it also brings huge opportunities and challenges for the unmanned rotorcraft researches.
The main application field of the unmanned rotation rotorcraft in this paper was field operation. This paper presented a control method that utilized the position offset and heading deviation to control the flight of unmanned rotation rotorcraft, then the simulation experiment and flight test were carried out after the mathematical modeling and the expected flight effect was achieved in theory.
Materials and Methods
The track control structure is shown in Fig. 1. Track control regarded the altitude feedback as a internal loop and the position feedback as an external loop.According to the scheduled route and navigation point,the altitude control quantity was given by the track control module. The altitude control module kept the UAV track and maintained stability, according to the control quantity operation execution mechanism. The output of the UAVviaposition calculation module,the results were fed back to the track control module(Jian, 2013). During the flight, the UAV was required to track the scheduled route and navigation point and it was necessary to ensure that the deviation between the flight track and the scheduled route was within a certain range.
Scheduled route planning provided the shape and direction of the UAV flight path according to the requirements of the task (Caponeet al., 2013). The track control was to control the flight of the aircraft to track in different shapes (Espinozaet al., 2014).
The main technical action in the flight of the UAV included climbing, loitering, left and right wheeling etc. and only the loitering, left and right wheelings were in connection with plane track. The flight route for the regional investigation was serpentine path in general. It was also a combination of straight flight and turn flight actually. So it could be concluded that there were only two ways of flying in the actual patrol flight, which included straight flight and turn flight(Leishman, 2004).
In this paper, the shape of the pre planning routes included straight lines and circles two cases. The following two route control modes would be discussed.
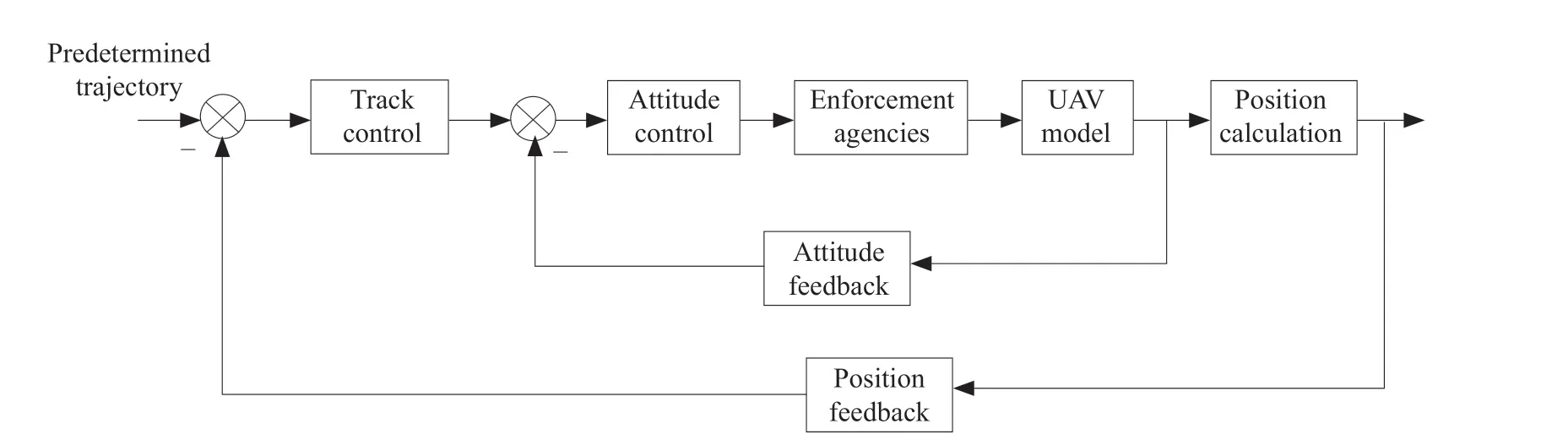
Fig. 1 Track control block diagram
Control mode of straight path
As shown in Fig. 2, assuming in the geodetic coordinate system the current route of aircraft flight was AB;X-axis was north andY-axis was east; pointPwas the aircraft's position; yaw distance between aircraft and route was ΔY; and route track angle wasψ0. It could be seen that in order to achieve flying with the flight route, the actual heading angleψgof the aircraft must be equal to the flight route angleψ0(Zhaoet al., 2010; Chen, 2013). Due to the easy calculation of the yaw distance, the calculating formula was

(x1,y1) and (x2,y2) were the coordinates of points A and B. It was more reasonable to use the deviation of yaw distance as Proportion intergration differentiation proportion intergration differentiation (PID) control.The following control law based on yaw distance:

In the formula,Kpwas the ratio coefficient;Kiwas the integral coefficient andKdwas the differential coefficient. The calculated ideal heading angle might differ from the course angle by 180° in the formula(1). The heading angle was not allowed. Therefore, the following restrictions were required:

After discretization, obtained:
In the formula, ΔTwas sampling period. In this paper, the interrupt cycle was 20 ms.

Fig. 2 Straight path control diagram
Control mode of circular path
When a predetermined flight path or a ground command platform required a UAV to make a turn at a predetermined point or to do a disc rotation at a specified point (Panidis, 2014), it was necessary to perform disc rotation control. There were many kinds of control methods of disc rotation. The method of controlling heading angle was used to achieve the purpose of turning (Jianget al., 2015). Similar to the linear control method, the control method of the circular track could be given.

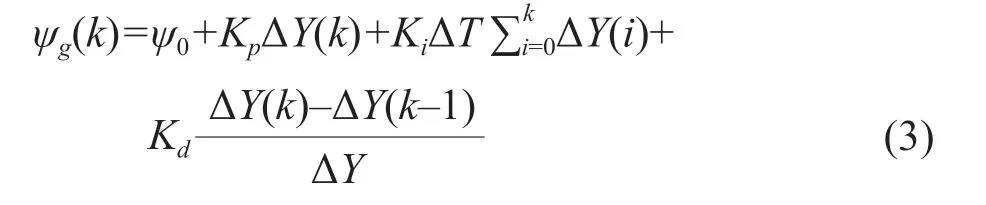
After discretization, obtained:

ψg, output heading control quantity;ψ0, the initial heading angle of UAV, when it reached the target point; ΔT, sampling period. In this paper, the interrupt cycle was 20 ms;KP, proportional control coefficient;KI, integral control coefficient;KD,differential control coefficient; ΔY, yaw of the UAV:in this paper ΔYhad positive and negative, separately.When the UAV flied on the left of the route, ΔYwas positive. When the UAV flied on the right of the route, ΔYwas negative. At this point, the yaw was the deviation between the actual position and the theoretical circle.
It was necessary to notice that the given heading angle range was [-180°, 180°].
In the actual flight, you could select specific control methods according to the situation, such as proportional control, proportional integral control and proportional integral differential control (Huang and Liu, 2015). Because the computation period was 20 milliseconds, maximum speed was 50 m per second and minimum turning radius was 100 m, so the deviation of the control quantity datum caused by the difference of the velocity direction and the tangent direction of the track could be ignored.
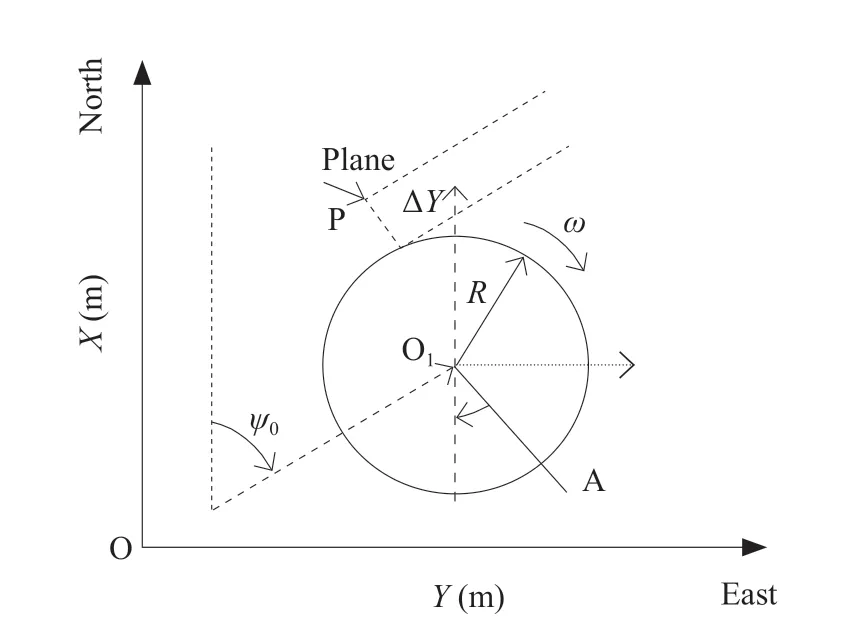
Fig. 3 Hover path control diagram
Navigation Control Law Design
Navigation's concept was leading the aircraft's flight.Specifically, it was leading the aircraft from one place to another using an instrument or external conditioner,or let the aircraft fly from one state to another. The control law is the key to navigation (Matthew, 2011;Laine, 2010). The navigation system of the UAV and flight control system were integrated. The realization of navigation needed the help of the flight control system. The model of aircraft navigation was divided into lateral navigation and vertical navigation.Different models corresponded to different control laws. The course keeping/control loop could realize the function of course keeping and course setting.There were three basic ways of track control (Huang and Zhao, 2010).
(1) Rudder stability or control course.
(2) Aileron correct course and rudder to weaken holland roll and reduce the sideslip.
(3) Use aileron and rudder to stability and control course meanwhile. The course deviation signal was sent to the rudder and aileron channel at the same time.
Track control
In general, the heading keeping/control loop of almost all the autopilots regarded the tilt hold/control loop as the inner loop (Booet al., 2012). Because there was a certain relationship between the tilt angle and the change rate of heading angle, so the change in the course of the aircraft was mainly achieved by tilting the aircraft. Assuming the aircraft was performing a coordinated turn, according to the balance of force, the approximate relation between turning angle rateψsand inclination angle could be obtained:

At the level of coordinated turn, the change rateψof the heading angle was equal to the turning angle rateψs. Therefore,ψandγwere also necessary to satisfy the above relations, that was:

The control chart of the course keeping/control mode could be constructed. The control framework is shown in Fig. 4.
Turn control
The design scheme was based on the unchanged flight height and flight speed. They were the prerequisite.And the turning control strategy was designed with a combination of three basic track control methods. The control schematic is shown in Fig. 5.
In Fig. 5, A was turn control start condition and it was the preset value of the distance from the target to cruise missile; B was position control start condition and it was the preset value of the maximum permissible deviation of the cruise missile; D was the distance of cruise missile's real-time position and scheduled flight route;was the given turning angle of the numerical table;was expected deviation angle in flight.
The guidance scheme was judged by two conditions. Three kinds of control modes of the outer loop could be switched to control the roll altitude loop in the inner loop. Finally, cruise missile yaw direction control could be achieved by changing the roll angle and cruise missile flight trajectory could be adjusted continuously. Through the optimization of the controller, the whole system could obtain favorable stability and rapidity.

Fig. 4 Course keeping/control mode system diagram

Fig. 5 Turning control system diagram
Simulation Experiment
A simulation verification was carried out on the control system by using the MATLAB to build the 6° of freedom model. According to the characteristics of the UAV flight path, the UAV was regarded as a particle. Used circular and serpentine curve to track guidance law particle separately.Tracking simulation was carried out according to the circular and serpen-tine curve track and the flight path error curve, heading angle curve and lateral offset curve in two flight states were obtained at the same time. Specific simulation results are shown in Figs. 6 and 9.
Tracking arc curve
Assumed that the UAV was flying in a three-dimensional plane. The initial desired trajectory was a circle of radiusR=150 m. TheX-axis was north, theY-axis was east andZ-axis was height. The center of the circle was located in the height of 200 m, (x,y)=(0, 0). InitialZ-axis error was 10 m. Used the circular arc tracking guidance law to track. The flight path position and the flight path error of the UAV in the three-dimensional plane are shown in Fig. 6. The red line represented the actual flight trajectory and the black line represented the preset flight trajectory.

Fig. 6 Tracking circular course

Fig. 7 Circular tracking heading angle

Fig. 8 Circular tracking lateral offset

Fig. 9 Serpentine path tracking
According to the simulation results, the variance among the circular trajectory heading angle, the maximum deviation, the minimum deviation of the lateral offset and the expected values could be calculated, which are shown in Table 1.
Serpentine curve tracking
Assumed that the UAV was flying in a three-dimensional plane. The expected initial height was 200 m.TheX-axis was north, theY-axis was east andZ-axis was height. The initial position of UAV was (x,y)=(230, -230). The serpentine curve was 2 350 m long. InitialZaxis error was 5 m. Used the straight and turn tracking guidance law to track. The UAV in the three-dimensional plane with a serpentine curve order went through (230, -230), (230, 210), (180,210), (180, -220), (130, -220), (130, 190), (80, 190),(80, -225), (30, -225), (30, 190). The flight path and the given flight path error of the first point to the 10th point are shown in Fig. 9.
According to the simulation results, the variance among the serpentine trajectory heading angle, the maximum deviation, the minimum deviation of the lateral offset and the expected values could be calculated, which is shown in Table 2.
Through the above guidance methods for simulation calculation, it could be seen that the flight path of the rotorcraft was flying along the route. The lateral offset's maximum deviation of rotorcraft in the circular track was 1.1 m. The variance of the heading angle and the given heading angle was 6°. The lateral offset's maximum deviation of rotorcraft in the serpentine track was 0.6 m. The variance of the heading angle and the given heading angle was 8°. When it reached the preset point and readied to turn a corner, the circular track met the requirements basically. The deviations of lateral offset and heading angle were tiny extremely.Serpentine track lateral offset was also very tiny, but the heading angle varied greatly, when it turned and the parameter needed to be further optimized. Through the simulation results, it could be seen that the rotorcraft could meet the requirements of the whole system along the flight path and it could fly according to the preset flight path.

Table 1 Circular trajectory error

Table 2 Serpentine path error table

Fig. 10 Serpentine track lateral offset

Fig. 11 Serpentine course tracking angle
Conclusions
In the flight process of the rotation rotorcraft, a control method combining the linear control and turning control strategies was adopted. With the combination of position information and heading deviation angle information, the rotorcraft was controlled to complete the entire track guidance. From the simulation results,it could be seen that the rotation rotorcraft could successfully complete the mission of flying on a specified route, when flying along a circular trajectory.The straight side offset was very small in the flight of serpentine trajectory. Due to the large instruction making the body occurred instability in the process,the straight side offset had deviation in the turning section. But the overall track was basically consistent with the scheduled route. The test flight experiment showed that in the actual flight the rotorcraft could track the preset route and the altitude of the flight also met the task requirements. This showed that the control strategy of using lateral deviation and heading angle deviation to realize the navigation of rotation rotorcraft was feasible. It also laid a solid foundation for the future development of the unmanned rotation rotorcraft and put forward a train of thought.
The navigation control system of the unmanned rotation rotorcraft in this paper did not involve the takeoff and landing stages, moreover, the coupling relationship between lateral manipulation and vertical manipulation was neglected. All these need to be further improved in the future work. The rotation rotorcraft is a complex system, and there will be more problems in the actual flight. Therefore, the navigation and control system of unmanned rotation rotorcraft need to be improved by the actual flight data in the future.
杂志排行

Journal of Northeast Agricultural University(English Edition)的其它文章
- Differential Responses of Phytophthora sojae to Seed Exudates of Host Soybean and Non-host Maize
- Identification of QTL and Analysis QTL with Tolerance to Sclerotinia sclerotiorum in Soybean
- Screening of Transgenic Soybean Materials for Salt Tolerance
- Development, Reproduction and Body Size Variation of Aphis glycines Matsumura Fed on Different Plants
- Effects of Bacillus subtilis on Degradation of Cellulose
- Effects of Dietary Fat Levels on Growth, Nutrient Digestibility,Nitrogen Utilization and Fur Quality of Growing-furring Blue Foxes