基于STM32的航拍侦查四旋翼飞行器设计
2019-10-21常猛汪洋徐伯乐孟康
常猛 汪洋 徐伯乐 孟康
摘 要:基于STM32的航拍侦查四旋翼飞行器设计,可以用于森林防火防盗巡逻、电力巡检等方面,减少了人工投入,从而使企业利益最大化。同时也减少了维护人员身体受伤的可能性,因此以四轴飞行器为平台的远程图像勘测就变得非常受青睐。四轴飞行器作为无人机的一种,能够垂直起落、空中悬停,适用于各种飞行速度与飞行剖面,具有灵活性高、安全性好、便于控制、体积小等众多优势,同时还能携带多种小型设备。本项目通过对四旋翼飛行器进行研究,分析其结构特点、飞行原理,设计合适的飞行方案,从而完成航拍勘察。
关键词:STM32; 传感器; 四轴飞行器:图像传输
四轴飞行器作为一个最优秀的搭载平台打破了地域和环境的限制,大大减少了人们在电网以及森林检测等一系列方面的重大投入,极大地降低了企业和个人的生产和安全成本,也为边远地区的安全与检测提供可能。
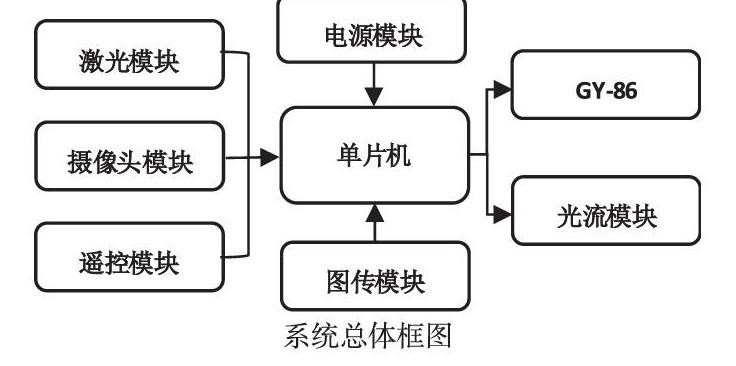
1 系统总体设计
飞行器的基本原理是根据遥控器接收到的的信号进行处理,然后作用到四个电机上,再通过PID算法进行调节使其能够平稳飞行。
本设计以STM32单片机最小系统为基础,由GY-86姿态传感器,光流模块、摄像头、图传模块、24C02存储模块、超声波模块、激光模块、遥控模块等8部分组成。
单片机是整个系统的核心,遥控器控制飞行器飞行,GY-86对飞行器进行角速度,加速度进行测量再通过姿态解算算出飞行器的三个角,最后通过PID算法来调节使飞行器实现平稳飞行。
激光模块进行高度测量,调节电机输出使其飞行在一定高度,光流模块对飞行器进行位置调节使其稳定在某一点,摄像头对周围环境进行拍摄,图传把摄像头拍到的图像进行回传。
飞行器是一个集合多种传感器的综合性能的平台,并对这些数据进行处理分析结合相应算法从而达到平稳飞行的目的。
1.1主控单元
本项目以STM32F407ZGT6作为主控芯片,该芯片频率高达168MHz,并且超频可以达到200MHz,运行速度碾压同类产品,它搭载在UCOSII操作系统上,可同时挂载256个任务,提升了各模块兼容性。
1.2姿态解算
飞行器控制器要能够采集处理微型 MEMS 惯性器件和三维地磁传感器的数据,通过姿态融合算法计算出飞行器的姿态角,并根据飞行指令和任务要求,结合相应的算法给出适当的控制信号,控制飞行器的执行机构,来达到控制飞行器的目的。本项目通过若干个串级PID算法来调节四个电机转速进而改变升力,从而控制飞行器的姿态和位置。
1.3遥控单元
遥控器端单片机通过采集操作杆ADC值,经过2.4G发射模块发送到飞行控制板端。遥控器端可以通过按键来完成功能设置和参数调节等操作,蜂鸣器用作遥控电池低电压报警。
1.4图传模块
图像传输选用5.8G图像传输技术TS835模块,传输距离可达2公里远,而且小巧灵活能够很容易的搭载在飞行器上面,并且回传画面清晰,因此可以通过观察远程回传的图像来控制飞行以及对周围环境进行勘察。
1.5光流模块
ATK-PMW3901是ALIENTEK 推出的一款超轻多功能低功耗光流模块(以下简称光模块),此模块集成一个高精度低功耗光学追踪传感器 PMW3901 和一个高精度激光传感器 VL53LXX(2m 版本使用VL53L0X, 4m 版本使用 VL53L1X,以下VL53LXX), PMW3901光流传感器负责测量水平移动,VL53LXX 激光传感器负责测量距离,抗干扰能力更强。
1.6电源模块
电池采用锂离子电池作为电源,并设计出可充电接口和电源变换电路,以此来完成充电与其他模块的供电功能。
1.7执行单元
通过各个传感器对周围环境进行测量,经过滤波,再通过姿态解算得到姿态角,通过单片机进行PID调节把角偏差信号转换成PWM信号,通过电调传给电机,从而调节电机转速使飞行器平稳飞行。
2 结论
本设计通过多种传感器的结合到飞行器上使飞行器能够完成复杂的飞行任务,并能够实现定高、定点、图像回传等任务,是现代工业的产物。能够对复杂的周围环境进行勘察,从而减少了人力物力的投入,且能够产生丰厚的社会效益和经济效益。
参考文献
[1] 基于STM32的四轴飞行器设计与实现[J]. 刘宝媛,龚赛君,崔治. 电子测试. 2019(19)
[2] 基于FPGA的四轴飞行器飞行控制系统设计[J]. 徐亚妮,罗文广,张亮. 广西科技大学学报. 2018(03)
[3] 四轴飞行器多功能无线遥控器设计[J]. 卞玉丽. 软件导刊. 2016(08)
[4] 基于APM的四轴飞行器调试[J]. 孙彦彦. 中国校外教育. 2016(30)
[5] 全数字化飞行器舵机硬件控制系统设计[J]. 倪原,牛佳惠,刘智平,刘应晟,秦东旭. 西安工业大学学报. 2014(06)