俄罗斯Luzhskaya编组站无人驾驶 调车机车操作技术与原理
2019-10-21
如今,所有运输领域都在积极发展无人驾驶技术。人类在无人机方面已经取得了巨大的进步,目前正在努力制造无人驾驶汽车。制造无人驾驶列车更为复杂,这与列车制动距离大以及要求车载传感器在合理范围内识别障碍物2个方面有关。本文将介绍俄罗斯Luzhskaya编组站中无人驾驶调车机车的操作技术与原理。
1 俄羅斯调车机车自动控制技术的发展历程
20世纪末,在轨距为1520 mm的俄罗斯铁路上出现了第一批装有无人驾驶技术系统的调车机车。这些系统由列车站中违反交通安全规定的行车行为所催生,其中大多数违规行车都出现在调车期间。最常见且最危险的铁路车站违规行车是:尽管有停车信号,列车却仍然通过。通过分析可知,主要有以下因素导致了此类违规行为的发生。
(1)机车司机未注意到交通指示信号,或不遵守信号规则 —— 54%;
(2)对信号指示的错误认知,也就是司机将允许其他车辆通过的信号误认为是对自己发出的信号指示 —— 9%;
(3)机车司机、调度员和列车编组员的行为缺乏协调 —— 9%;
(4)列车超速 —— 6%;
(5)延迟启动制动程序 —— 5%。
为了减少人为因素对车站交通安全的影响,俄罗斯铁路公司在20世纪90年代便开始使用调车机车远程控制系统(MALS)以及驼峰信号自动化系统(GALS)。其目的在于提高车站交通(包括调车作业)的安全性,确保员工的安全和健康,加快作业进程,改善对调车活动的控制,提高调车机车的作业效率,以及创建可以优化车站控制过程的信息平台。这些系统利用连接着全电集中联锁装置的铁路设施数字无线电信道对调车机车进行控制,从而实现了上述目标。此外,通过这些系统,还能控制调度员和机车司机的行为。
通过控制机车(牵引和制动),可以自动调节机车或车列在停车信号装置前的速度和运动状态,并且禁止调车机车超速运行。
在驼峰上推送和溜放车列时,GALS系统还能够远程控制调车机车的速度,实现了以可变的速度(最高0.5km/h)和一致的精度推送和溜放车列,从而最大限度地缩短了调车时间。
后来,通过使用卫星导航和各种频率范围的数字数据传输,以及引入调车机车动力装置的各种操作模式,使这些系统得以统一,其功能也得以扩展。第1台具有无人驾驶控制装置的调车机车于2007年在Krasnoyarsk-Wostochnyi车站的驼峰上投入使用。在此机车上,司机无须参与列车的操作和控制。
2 Luzhskaya编组站的技术装置结构
支持调车机车自动控制模式的技术装置包括静止设备和车辆设备2部分。
静止设备包括以下组件:①全电集中联锁装置(ESTW)的微处理器系统 EZ-EM,包含调度员操作站,由Radioavionika OAO公司生产,用于进路线群中;②驼峰自动电气集中装置,型号为MSR32,包含驼峰作业员的MSR32自动化操作站,由西门子公司生产,其中还包括进路线群中的信息发送和接收装置(应答器),用于在推送和溜放车列时自动控制机车; ③MALS的固定装置(俄语缩写“SDU-ML”),包含带调度员操作站和驼峰作业员操作站的MALS控制计算机,其中,MALS的调度员操作站发挥着主导作用,调度员可以将机车控制命令(如机车控制接管、行车许可、机车停止等)输入其中。
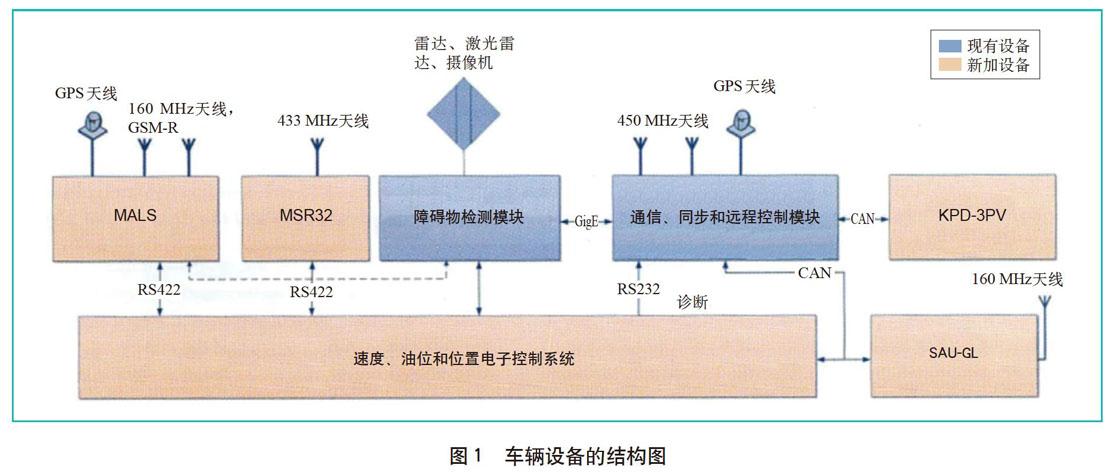
调车机车TEM7A的车辆设备由以下部件组成:①调车机车自动控制系统(俄语缩写“SAU-GL”);②MALS的车辆设备;③MSR32的车辆设备;④速度、油位和位置电子控制系统;⑤数据通信中心 KPD-3PV。
目前,无人驾驶机车在进路线群中的基本任务如下:①移动到指定进路的车列处,并与之相连;②在驼峰上推送和溜放车列。第1个操作以EZ-EM传输的数据为基础。而推送和溜放车列则依据MSR32系统集中装置的数据;对机车的直接控制由SAU-GL来完成。
引导调车机车移动并与车列连接,由ESTW调度员使用MALS的改进操作站来完成,该操作站中还会显示调车机车的位置。
推送和溜放车列是在MSR32系统的控制下进行。通过执行驼峰主控制器的命令,向机车发出的命令(如开始移动、改变推送速度、停止)会自动执行。由于使用了多个基于不同信息和算法的控制系统以及2个操作员(调度员和驼峰作业员),因此需要明确界定交互作业的顺序以及限定控制区域。交互作业的示例如下:驼峰作业员通过MSR32和EZ-EM之间的1个安全接口向EZ-EM调度员发出同意推送的信号,然后由EZ-EM指定推送进路。推送进路的控制则由驼峰作业员执行,即驼峰作业员可以:①使列车开始移动,必要时,使其停止;②决定列车在线路上的行驶方向;③调整推送进路的分配。
除了控制推送进路,驼峰作业员和MSR32系统还可以控制机车。如有来自MSR32系统的请求,在收到自动连接的肯定答复后,SAU-GL系统将从接收MALS的机车控制命令切换到MSR32。当列车的最后一节车厢越过驼峰后,MSR32会给出机车停止命令。在检测到机车停止之后,由MALS系统接管机车的控制。
推送速度、加速度和列车质量等参数是在MSR32子系统OPSIM(运行模拟系统,用于计算溜放速度)的自动模式下计算出来的,并通过数字接口从机车直接传输到SAU-GL中。MSR32系统通过以下途径确定机车和车列的位置:①安装在进路轨道上的应答器(每个定位点有2个应答器)信息,用于检测机车的通过情况;②SAU-GL传输的关于机车行驶距离及速度的数据;③来自车轮传感器的信息。
在推送进路上使用自动机车控制,除了能实践无人驾驶技术,还能通过优化实施过程以及精确计算推送速度,将驼峰设备的作业能力提高25%。
3 控制调车机车和检测障碍物的远程控制子系统
Luzhskaya编组站正致力于实现对调车机车的远程控制,这是其无人驾驶控制项目的一部分。为此,在上述系统的静止部分添加了机车司机操作台以及计算机远程控制装置(控制计算机中心),以便对3台无人驾驶机车TEM7A的运行进行控制。必要时,其中的1台机车可以接管对全部3台机车的控制。操作台包含1个控制台以及显示视频信息和诊断信息的屏幕。
此远程控制系统能与MALS系统进行功能交互。在项目实践过程中,技术人员还开发了集成工具(交互规则、协议和数据格式)。使用这些工具,可以从MALS的控制计算机获取和处理以下信息:①编组站进路状况;②轨道区域状况;③调车机车状况;④每台机车的数据(允许速度,指定进路)。此系统还能对已接收和处理的请求、相邻系统发送的请求以及从相邻系统接收的答复进行记录和保存。
机车车辆设备还附加了2个模块:①障碍物检测模块;②通信、同步和远程控制模块。图1显示了车辆设备的结构图。车辆设备的新安装模块与已有的TEM7A机车设备连接。
现有机车系统(如SAU-GL、KPD-3PV和MALS)之间的交互,采用串行接口 CAN、RS232、RS422。障碍物检测模块与通信、同步和远程控制模块之间的交互基于高速以太网接口(GigE)。
车辆设备和静止设备之间的交互作业通过2个无线电信道实现。GSM LTE信道用于将视频流从摄像机传输到远程控制系统以及传输诊断信息。在SDU-ML系统上还使用1个频带宽度为160 MHz的信道来传输控制命令。
在远程控制模式下,车辆设备有以下功能:①给TEM7A机车中的机车司机兼操作员传输其可用范围内的SAU-GL系统和MALS系统参数; ②传输安装在行驶方向上摄像机的视频图像;③接收和执行远程操作员的远程命令;④监控远程控制通信信道;⑤在机车运行期间对障碍物进行检测和分类; ⑥确定障碍物的位置;⑦如果识别出障碍物为人或者动物,将发出警报;⑧使机车在检测到的障碍物前自动停止;⑨告知机车司机兼操作员干扰列车运行和制动的障碍物。
4 障碍物检测子系统的技术特点
在Luzhskaya编组站中,有3台具有无人驾驶模式的TEM7A机车投入使用(图2)。这些机车装有特殊的无线电设备和传感器,可以检测障碍物。
为了检测障碍物(人和动物),机车安装了障碍物检测模块,其包括:①激光雷达(LiDAR);②雷达;③光学摄像机;④用于处理传感器数据的高性能计算模块。
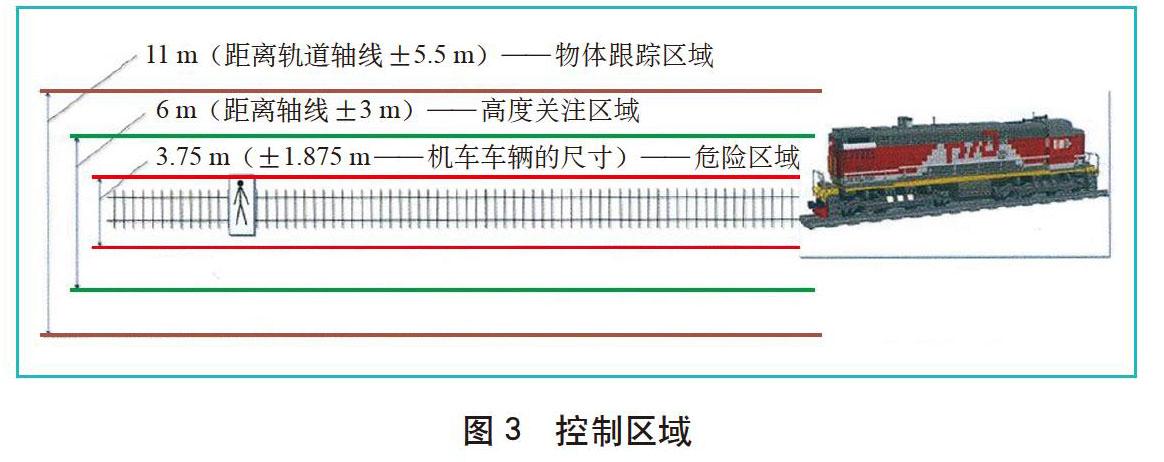
使用障碍物检测模块,首先就是确定可能会出现障碍物的进路搜索区域。 为了提高此技术的精确性和可靠性,会使用2种方法检测机车进路。第一种方法基于计算机视觉方法,通过处理用于检测轨道的光学摄像机所获取的图像来实现。第二种方法基于电子地图中的数据、当前位置以及关于编组站内指定行程的信息。确定了搜索区域,便可以根据障碍物所在的区域过滤掉其他识别出的物体和障碍物(图3)。
物体的检测和跟踪仅在图3所示的区域中进行。车载控制系统的响应取决于物体的定位区域。当在红色区域中检测到障碍物时,机车会发出声音信号并在检测到的物体前制动。当在绿色区域中检测到障碍物时,机车会发出声音信号并将行驶速度降低到5km/h以下。当在棕色区域中检测到物体时,机车会发出警报信号。
检测进路中的物体是由多个不同类型的传感器来完成。图4显示了当机车驶近车列时,雷达和激光雷达提供的信息示例。图5显示了与图4信息相匹配的摄像机图像。由于数据量很大,而且存在错误信号和干扰,因此需要使用强大的数学工具来处理数据。对于每个检测到的物体,都要确定状态向量及其协方差矩阵,这二者决定参数的准确性。系统会根据运动模型跟踪所有检测到的物体。对于机车进路中最重要的异物——人,恒速(CV)模型最适合。以目前广泛应用的、用于非线性测量的卡尔曼滤波算法为基础,并对其进行适当的修改,可以实现对物体的跟踪。
利用激光雷达、雷达和摄像机可以对物体状态进行初始化以及进一步细化处理。每个传感器都有其自身的特性和处理算法。对于激光雷达获取的大量数据可以使用聚类算法。该算法根据边界距离对物体上的点进行分组,这基于对自适应断点检测算法的修改。利用激光雷达数据,还能够以相当高的精度检测具有简单几何形状的物体,并通过计算每个物体的重心来确定其位置。由于铁路上存在大量高反射金属物体以及大量相应的干扰,所以应用雷达时需要特殊的滤波算法。雷达可以识别出道岔、轨道和轨道箱。同时,雷达也可以有效地识别移动物体,并将它们与其他物体区分开。相比激光雷达,雷达的检测范围更大。在应用将监测对象与测量数据进行比较的数据处理算法时需要特别注意,应该使用全局最邻近算法。同时,应对检测系统进行设置,以排除不能识别路线上障碍物的问题。
大量参数增加了错误检测障碍物的可能性。因此,此车载障碍物检测系统还会将诸如塑料袋、胶带和其他异物作为障碍物。而使用远程监测和远程控制系统则可以解决错误检测障碍物的问题。1个机车司机兼操作员可以在1个专门设计的操作台上控制多辆调车机车。此操作台上会显示车辆数据和前置摄像头的实时视频图像。如果需要,也可以通过操作站上的控制面板远程控制所选机车。如果机车检测到障碍物,则会向机车司机兼操作员发出警报。在手动模式下,如果障碍物识别错误,机车司机可以直接驾驶机车通过。
5 结语
Luzhskaya编组站无人驾驶机车的試运行证明了该技术的可行性和前景。该技术集自动控制、体系结构、人工智能、视觉计算等众多技术于一体,是计算机科学、模式识别和智能控制技术高度发展的产物,能提高车站交通的安全性,加快作业进程,并提高调车机车的作业效率,具有广阔的应用前景。
参考文献
[1]Y Smagin,P Popov. Technologie und Prinzipien des Betriebs lokführerloser Rangierlokomotiven auf dem Rangierbahnhof Luzhskazya[J]. Signal + Draht,2018,110(12):30-38.
苏靖棋 编译
收稿日期 2019-03-12
