城市轨道交通制动系统PHM技术 研究与应用
2019-10-21刘元清耿晓峰祁成
刘元清 耿晓峰 祁成


摘 要:通过分析城市轨道交通制动系统PHM技术应用现状,结合PHM建设理念,介绍如何在城市轨道交通制动系统开展PHM技术研究与应用。提出制动系统PHM目标及架构,从数据采集与处理、异常检测、故障诊断及故障预测方面对制动系统PHM主要功能进行阐述,并结合相关案例进行说明。
关键词:城市轨道交通;车辆;制动系统;PHM;故障诊断;故障预测
中图分类号:U231.3
1 制动系统PHM应用现状分析
故障预测与健康管理系统 (Prognostic and Health Management,PHM)是指利用传感器采集和分析系统运行状态数据,以提供先进的故障诊断和预测行为,进而能够预测未来的健康状况、问题的出现及需要的维修行为;基于诊断/预测信息、可利用资源和运行要求,对维修和后勤活动做智能、充分和适合的决策,从而在产品设计、生产、检验、运行、维护、配置等整个生命周期过程中体现出管理成本效益。简单地说,PHM就是借助各种算法和模型,找到故障表象与故障原因之间的关系,推导出设备故障的原因及故障部位,并对故障征兆趋势进行跟踪,对未来可能发生的故障进行预测,并通过维修决策合理调配维修保障资源,从而制定出最佳维修保障方案。PHM项目的研发与应用,可在成本优化、运营效率提升、运营安全性及运营品质提升等方面获得卓越成效,将为城市轨道交通带来显著的经济效益和社会效益。
制动系统作为行车安全的关键子系统,承担着保证列车安全、可靠停车的重要职能。随着现代工业技术尤其是传感器、嵌入式系统、网络通信技术、基于大数据的信息技术的迅速发展,制动系统的智能化管理、智能化诊断已经逐步开始应用。在极大地降低司机和轨道车辆运维人员工作强度的同时,提高产品的可维护性及可用性,实现轨道交通装备的预测性维护、远程诊断监控维护与全生命周期管理。设备维修方式也逐渐由定期维修转变为状态维修。
目前国内外城轨车辆制动系统均具备系统自诊断功能,但是不同制动系统的诊断覆盖率不尽相同。故障诊断和维修维护方面主要存在以下不足。
(1)故障排查存在缺陷。制动系统很多故障,例如抱死、制动力不足等存在着多系统耦合的情况,因此仅靠制动系统的自身判断很难快速进行故障定位。
(2)无法实现故障的中间状态预警。目前制动系统的诊断条件只能等故障影响到一定程度后才能发现故障,即只有“正常”、“故障”2种状态判断。
(3)维护模式存在缺陷。目前制动系统存在着维修不足或维修过剩的现象,无法对产品的寿命进行预测。
2 制动系统PHM建设理念
2.1 系统目标
将PHM技术应用在城市轨道交通车辆制动系统中,应充分考虑车辆的实际运行环境以及制动系统的产品特点,结合现有的设计理念、运营方式以及维护体制等内容,对多样、繁杂的数据进行失效物理、机器学习以及专家知识等多技术的融合分析,以期达成以下目标。
(1)针对系统中搜集的海量数据,建立统一的数据管理平台,研究大数据背景下的数据分析方法,实现对制动系统中数据的有效处理、分析和综合应用。
(2)结合产品PHM技术研究,对产品运行全寿命周期中已出现的故障实现精确快速定位;对潜在的故障或异常进行提前告警,实现故障预测。
(3)从制动系统众多状态参数中,提取表征制动系统状态的参数指标,建立制动系统健康状态评价指标体系,并对其健康状态分级。
(4)综合运维体系中的各个环节因素,例如人员、备件、站点、維护等,研究最优组合,形成完善的制动系统运维解决方案。
2.2 系统架构
依据制动系统PHM建设目标,构建制动系统PHM架构,如图1所示。制动系统车载PHM单元对综合采集到的数据进行故障诊断、系统自评价以及故障预警、预测,并将原始数据、状态信息以及故障信息发送至车辆端车载PHM系统,数据由车辆端PHM系统经整车厂地面PHM系统整理后通过互联网发送至制动系统地面PHM平台。
制动系统地面根据预先定义的数据视图将数据归类以便进行大数据分析和机器学习,找寻故障、分析关联、预测故障,通过企业接口系统接入专家系统以协助分析;在控制中心查看外部资产性能、故障趋势及内部相关流程、告警、现场维修状态、资源等。
3 制动系统PHM主要功能
制动系统PHM技术主要包含数据采集与处理、异常检测、故障诊断和故障预测功能,下面将重点介绍这4个功能。
3.1 数据采集与处理
制动系统的信号采集主要覆盖制动系统的关键部位,目前城市轨道交通车辆制动系统各相关部件信号采集内容如表1所示。
3.2 异常检测
制动系统常见的异常检测故障有抱死故障、摩擦制动施加故障、摩擦制动缓解故障、速度传感器故障、防滑阀故障、压力传感器故障、指令类故障、控制类故障、功能性故障、通信类故障等。
现有的故障诊断均为逻辑性诊断,具有安全导向、事后检测、实时性差、精确度低等特点,结合现有的数据现状、异常检测的方法可逐步向故障预警进行过渡。如针对摩擦制动施加/缓解等系统级异常,以制动缸压力为最终表征。车辆制动过程中,制动缸压力数据是动态的、大量的,因此如何挖掘出制动缸压力数据的特征就指向于如何使用简易的方式表达该段数据。针对制动缸压力的数据特性,将制动缸压力过程分为系统响应、建立、稳定3个阶段。针对每个阶段的特性,使用8个特征量(表2)表达制动的时序数据。
针对多次制动的特征量进行自相关对比,借助机器学习、专家经验等确定异常的原因,持续积累经验形成样本,逐步形成自动化的系统异常检测和原因分析。
3.3 故障诊断
故障诊断的目的是快速定位故障及其失效模式,提升维修分析的效率,城市轨道交通车辆制动系统目前的故障诊断已具备快速排查大部分故障的能力,但仍存在以下缺陷:
(1)系统级故障检测较多,部件级故障定位自动化程度低;
(2)人工排查程序规范化程度低,多数依靠专家经验现场分析。
由于制动系统存在数据样本量小、系统学科性复杂等特点,传统的基于机器学习的故障分析、聚类的诊断推理在精确度方面存在较大瓶颈,因此如何结合机理及数据分析技术成为城市轨道交通车辆制动系统故障诊断领域的重点研究方向。
常见的故障诊断内容包括电路板故障、阀类故障、传感器故障、管路泄漏故障、连接器故障、通信类故障。这些故障种类在很多时候其信号的表征是深度耦合的,因此如何进行诊断定位是制动系统较为特有的需求方向。
以常见的抱死故障为例,其可能的故障原因有以下3种:①速度传感器故障;②轴抱死;③电路板故障。由于抱死的后果较为严重,往往对车辆运营产生影响,因此需要对以上的故障原因进行快速诊断及定位。笔者针对以上的故障原因,采用卡尔曼滤波方法进行研究。卡尔曼滤波算法核心是运用递归算法来达到最优状态估计,利用前一时刻的估计值和现时刻的观测值来更新当前状态变量的估计值,结合残差判断故障及佩特里(Petri)网等技术进行故障诊断,进而将速度信号自身的故障和真实的轴抱死故障进行区分。其算法流程如图2所示。
3.4 故障预测
故障预测一般有2种方法,一种是基于已有的产品寿命模型进行预测,一种是基于历史数据建立模型进行预测。
3.4.1 基于已有产品的寿命模型
在城市轨道交通行业中,产品的实际运用很难得到全寿命周期的特性数据,因此如需得到较为完整周期的模型,有仿真和实验2种方法获取数据。仿真的成本较低,可以通过仿真实现多种故障注入的验证,由此获得产品不同的响应特性数据。
仿真的局限性在于其研究成果很大程度上依赖于模型的精确程度以及对于产品失效机理的理解深度,目前应用比较广泛的是采用可靠性实验技术开展一定样本量的产品加速寿命实验,实时监测全实验过程的产品性能退化特征,利用基于相似性建模的方法进行故障预测,常用的加速寿命实验模型有以下2种。
(1)温度加速模型:
(1)
式(1)中, AFT是温度加速因子,E是活化能,k是玻尔兹曼常数, T1是典型工作绝对温度, T2是加速试验绝对温度。该加速模型被广泛的应用在各种温度加速测试里,包括MIL-STD-217和Telcordia SR332 可靠性预计标准。同时也被运用在MIL-STD-883,IEC 60025-2 的可靠性测试和寿命验证方法中。
(2)温湿度加速模型 (Pecks Model)综合了温度和湿度加速模型,可以提高加速因子,减少测试时间。其加速模型公式如下:
(2)
式(2)中, AFH是湿度加速因子, H1是使用环境相对湿度, H2是加速试验环境相对湿度,n是未知模型参数,由腐蚀特性决定,一般取值1~5。
目前大部分产品都采用温湿度测试加速模型,而且在电子元器件和半导体领域,已经形成了标准,为各个国家各个领域所共同遵守。这些标准包括 EIA/JSTD 22-A 101-B 恒温恒湿寿命测试。
3.4.2 基于历史数据的预测模型
预测是在了解和掌握系统的运行状态及状态变化规律的基础上,根据一定的预测方法推测其状态的变化趋势,估计故障的传播、发展和系统的性能劣化趋势,是进行事故预防、实现视情维修和健康管理的重要手段。其中基于数据驱动的故障预测方法主要利用设备的历史工作数据、故障注入数据以及仿真实验数据等,通过各种数据分析处理算法进行趋势预测,是目前应用比较广泛的预测方法。
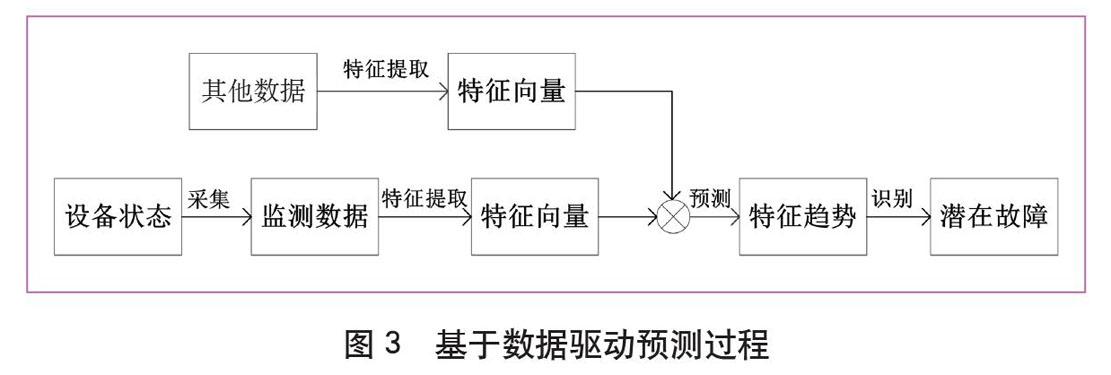
基于数据驱动的故障预测是数据采集、特征提取、趋势预测、故障识别的过程(图3),主要分为以下3个步骤。
(1)预测样本数据准备和预测模型训练。将监测到的设备状态数据进行分析、特征提取后形成历史数据,结合故障注入数据或仿真数据等其它数据,构建用于故障预测的训练样本,并进行预测模型的训练。
(2)趋势预测。将监测到的潜在故障状态信息进行分析处理,利用第一步所建立的模型进行状态变化趋势和系统性能劣化趋势预测,得到表征设备将来状态的特征趋势数据。
(3)潜在故障识别。利用预测得到的特征趋势数据进行故障模式识别,预测设备未来可能发生的故障或设备的剩余寿命。
基于数据驱动预测的典型方法有时间序列分析、灰色模型预测、隐马尔可夫模型预测、神经网络预测和支持向量机预测等,优缺点如表3所示。由于预测本身具有不确定性,需要提高预测的精度和稳定性,采用混合预测方法和组合预测方法的故障预测逐步得到应用,也是故障预测技术发展的必然趋势。
4 结束语
以城市轨道交通发展现状为基础,提出城市轨道交通制动系统的PHM架构,论述了PHM的主要功能,并结合相关案例进行了说明。但城市轨道交通制动系统PHM技术仍处于起步阶段,随着未来工业互联网的深化应用,其工程应用的可行性及其能效将逐步体现,同时伴随城市轨道交通行业智能运维技术的逐步推广,制动系统PHM技术将成为产品的核心竞争力。
参考文献
[1] 王玘,何正友,林圣,等. 高铁牵引供电系统PHM与主动维护研究[J]. 西南交通大學学报,2015,50(5):942-952.
[2] Sun B,Kang R,Xie J. Research and application of the prognostic and health management system[J]. Systems Engineering and Electronics,2007,29(10): 1762-1767.
[3] Farhat A,Guyeux C,Makhoul A,et al. On the coverage effects in wireless sensor networks based prognostic and health management[J]. International Journal of Sensor Networks,2018,28(2):125-138.
[4] Yi X,Chen Y,Hou P,et al. A survey on prognostic and health management for special vehicles[C] //2018 Prognostics and System Health Management Conference(PHM-Chongqing). IEEE,2018.
[5] 尹方,杨永勤,崔虎山. 动车组轴抱死检测误报故障的解决方案[J]. 电力机车与城轨车辆,2013,36(1):83-84.
[6] 张尧庭,方开泰. 多元统计分析引论[M]. 北京:科学出版社,1982.
[7] Ralston P,DePuy G,Graham J H. Computer-based monitoring and fault diagnosis:a chemical process case study[J]. ISA Transactions, 2001,40(1):85-98.
[8] Kwon D,Hodkiewicz M R,Fan J,et al. IoT-based prognostics and systems health management for industrial applications[J]. IEEE Access,2016(4):3659-3670.
[9] Macaluso A,Jacazio G. Prognostic and health management system for fly-by-wire electro-hydraulic servo actuators for detection and tracking of actuator faults[J]. Procedia CIRP,2017(59):116-121.
[10] Elsayed A.Elsayed. 可靠性工程[M]. 北京:电子工业出版社,2013.
[11] Peysson F,Ouladsine M,Outbib R,et al. A generic prognostic methodology using damage trajectory models[J]. IEEE transactions on reliability,2009,58(2):277-285.
[12] 韓东,杨震,许葆华. 基于数据驱动的故障预测模型框架研究[J]. 计算机工程与设计,2013,34(3): 1054-1058.
收稿日期 2019-08-16
责任编辑 宗仁莉
