智能预警消防车定位研究
2019-10-16赵建峰庄乾辉蔡依霖李翔宇
赵建峰 庄乾辉 蔡依霖 李翔宇 赵 婧
南京工程学院自动化学院 江苏南京 211167
近年来,随着经济和科技的快速发展,各种大型石油化工企业密集,隧道、地铁公共交通设施等不断增多,油品燃气、毒气泄漏爆炸事故时有发生。灭火机器人进入易燃易爆、有毒、缺氧、浓烟等危险灾害事故现场进行救援灭火,有效地解决了消防人员面临的人身安全问题,并能对火灾情况进行科学判断,高效灭火。本文设计了一种基于STM32处理器并带有多传感器的智能消防小车,可实现火源的精准定位及灭火。
1 定位系统
1.1 计算偏航角
计算姿态角,要用到欧拉角,如图1所示。
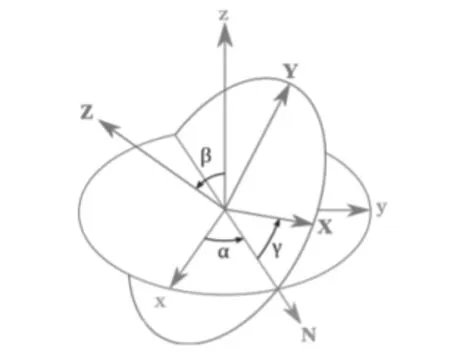
图1 欧拉角
欧拉角是用来确定定点转动刚体位置的一组独立角参量,由章动角β、旋进角(即进动角)α和自转角γ组成。任何方向都可以通过3个基本旋转角来实现,即围绕坐标系的轴旋转。欧拉角可以通过这3个旋转角来定义,它们也可以通过元素定义的几何形状和几何定义来表明。3个角的基本旋转可以是外在的,或者固有的。不同的需求或场合可以使用不同的旋转轴组来定义欧拉角。因此,任何使用欧拉角分析的模型都应该在定义之后进行研究。在此项目里,欧拉角只针对姿态角中的偏航角进行分析计算[1,2]。
根据捷联惯性导航原理,预警车的姿态角就是载体坐标系b相对于导航坐标系n的方位关系。本文定义载体坐标系OXbYbZb,该坐标系与车体固联,原点选为车体质心Xb轴沿车体横轴指向右,Yb轴沿车体纵轴指向前,Zb轴垂直指向车体上方,且构成右手坐标系。定义地理坐标系OXnYnZn作为导航坐标系,该坐标系的原点在车体的质心Xn,Yn和Zn轴分别从原点出发指向东、北和天向,简称导航坐标系ENU。
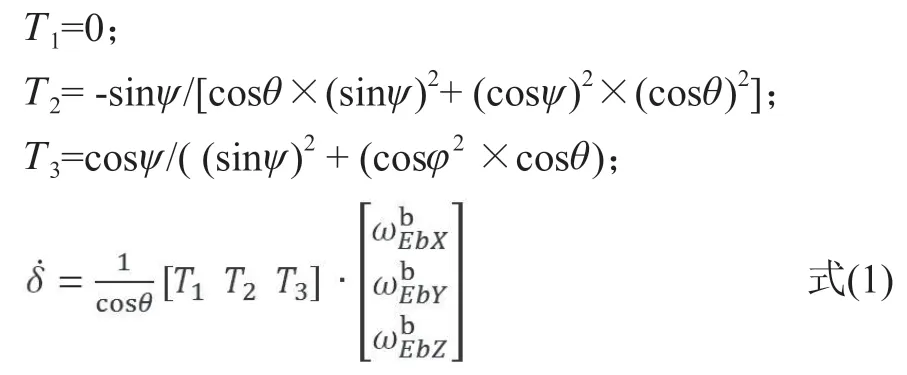
设载体坐标系b是由导航坐标系n按照Z→Y→X顺序,分别旋转ψ→δ→θ角度得到。其中ψ为滚转角;δ为偏航角;θ为俯仰角。本系统只需要用到偏航角δ,直接套用欧拉角微分方程来解算欧拉角姿态:
1.2 追踪导向
智能预警消防车通过自身旋转360°,并利用超声波和火焰传感器的扫描来躲避障碍并寻找火源。每当消防车启动,其身可视为一条线段,水泵视为箭头,指向方向即为0°。每旋转1°,停止车体并扫描前方,记录周围环境。
超声波通过计算发出信号与接收到返回信号时间t来测距离D,其公式如下:

火焰传感器通过红外探测火源,其输出信号转换值V(模数转换)与离火源距离D成反比关系。受环境影响,其反比关系成非线性。此处忽略误差,将其近似看成线性方程,公式如下:

通过传感器获得的障碍物距离和火源距离,结合姿态传感器的偏航角,即可描绘以车为原点时360°范围内的所有物体。将火源位置一一标出,从近到远依次进行灭火。
1.3 PID调节
由于机械结构和地形环境等因素,车体在自转时会与设定角度产生偏差。前往火源时会与设定路线产生偏差,不能停止在火焰前方最佳距离处,因此需要采用闭环自动控制技术。
目前,闭环自动控制技术主要是基于反馈的概念以减少不确定性。反馈理论的要素由3个部分组成:测量、比较和执行。测量被控变量的实际值,并与期望值相比较,用这个偏差来纠正系统的响应,执行调节控制。由于单级PID稳定性不高[3],本项目决定采用串级PID方式准确控制车的自转角度和直线行驶。车前端能够在给定角度值的小范围内波动(±0.4°以内)时,车能近似直线行驶。
PID[4]基本算法:

比例项Kpe(t):调整稳态误差,值越大则稳态误差越小,但系统稳定性会降低。
本文中定义系统偏差:

外环中,u(t)是角度期望值,y(t)为当前角度值。通过第一次外环PID先积分后微分的运算,得出角速度环期望值u(t)'和角速度值y(t)'。然后再经过第二次内环PID先积分后微分的运算得到需要的输出值。
2 系统仿真
为了验证理论分析的真实性和准确性,利用MatLab[5]数字仿真软件,对算法效果进行精准度和响应速率的仿真。
对两级PID进行仿真,预设外环常量:

内环常量:

经过MatLab多次仿真实验,得出最优外环常量:

内环常量:

当设置期望角度为1°时,算法响应速率如图2所示。
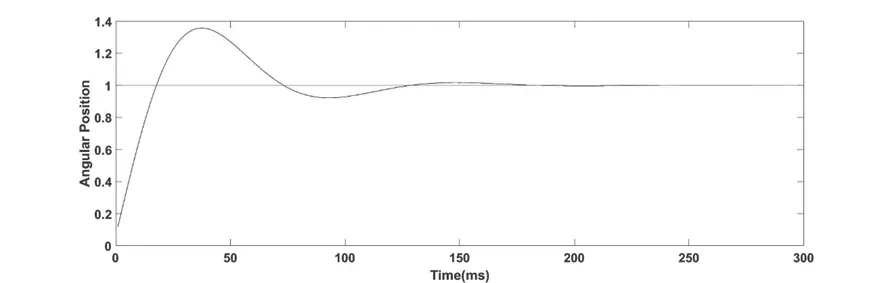
图2 模拟响应
预估采样时间为0.15 s,但如图2测试结果显示,在开始时会有0.3°的超调,但0.2 s后会达到平稳,因此0.2 s是最好的采样时间。这样可以在系统开始响应之前,获得更多时间来采样。当设置期望角度为1°时,消防车实际行驶角度偏移变化曲线如图3所示。

图3 消防车角度偏移变化曲线
3 实验验证
此实验目的在于测试预警车追踪火源、停车灭火时车和与火源的距离。受车身长度和灭火装置的推动力影响,最佳灭火位置为距火源点15 cm处。
通过5组实验对比,第一次关闭预警车的PID运算功能,观察其停止位置距离火源距离与设定值(15cm)之间的偏差ΔD。第二次实验开启预警车PID运算功能,与第一次实验进行对比,观察算法精准度。5组实验中,第一次无PID算法时最大偏差值为-5 cm,最小偏差值为±2 cm。而有PID算法时,平均误差只有±1 cm,大大提高了定位精准(见表1)。
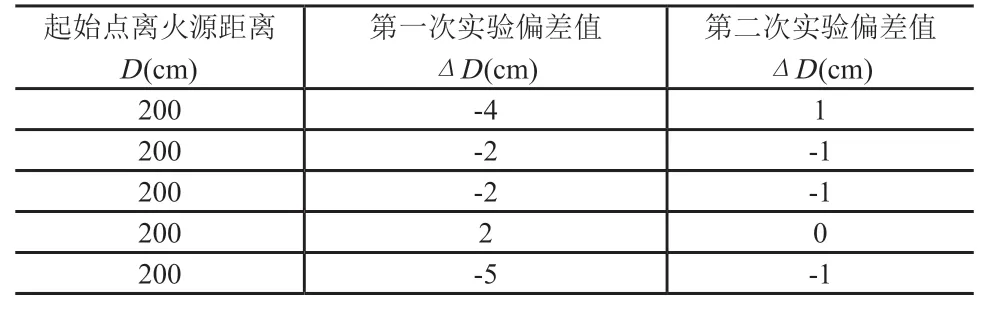
表1 算法优化结果
4 结语
生活中存在各种安全隐患,层出不穷的安全事故不仅给人们带来了财产上的损失,更造成了心灵上的伤害。近年来,国家大力研发新型智能防火机器人来降低损失,造福人类。本文介绍的多功能智能预警消防车正符合以上需求,具有结构简单、成本低廉、开放性好、功能性强、效率高等优点,具有重要的研发价值。
